Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
ELEKTROMEKANİK KUMANDA SİSTEMLERİ
1. GİRİŞ
Elektrik motorları takım tezgahlarını ve diğer endüstriyel uygulamaları çalıştıran en önemli güç
kaynağıdır. Çoğu zaman motorlar, bir makinanın ya da tezgahın tasarımının bir parçasıdır. Motorların
kontrol deyimi : motorları hızlandırma, yavaşlatma, yol verme, durdurma ve hız kontrolü gibi bir motor
denetleyicisinin işlevlerini gösterir.
Bütün endüstri dallarında temel amaç, otomasyon sağlamak, üretimi arttırmak ve maliyeti düşürmektir.
Bunu gerçekleştirebilmek için, kontrol sistemlerinin tasarımını, çalıştırılması ve bakımı, motor
kontrolleri esaslarının bilinmesi gerekir.
2. KONTROLUN GENEL PRENSİPLERİ
Kontrol donanımını seçerken, tasarlarken, kurarken ve korurken dikkat edilmesi gereken bazı şartlar
vardır.
Bir motor, çok sayıda makinanın bağlandığı ortak bir mili döndürmek için kullanıldığında o motoru
kontrol etmek basit bir problemdir. Ancak, her bir makinanın bireysel çalıştırılması durumunda motor,
makinanın tamamlayıcı bir parçasıdır ve motor denetleyicisini bağlandığı makinanın ihtiyaçlarına göre
tasarlamak gerekir.
Kontrol sistemleri basit bir anahtardan, röleler, zamanlayıcılar, korumalar, çok işlevli anahtarlar gibi
elemanlardan oluşan karmaşık bir sisteme kadar bir çok şeyi, ifade eden geniş anlamlı bir terimdir.
İşte bu sistemi tam verimli olarak oluşturabilmek için bir çok etken göz önüne alınmalıdır.
2.1 (MOTOR) KONTROL SİSTEMLERİNDE ÖNEMLİ NOKTALAR
Özel bir uygulama için belirli bir eleman seçerken ; motor, makine ve motor denetleyicisinin birbiriyle
ilişkili olduğu ve bir paket olarak düşünülmesi gerektiği unutulmamalıdır. Genel olarak, bir
denetleyicinin seçimi ve kurulmasında 5 önemli temel etken vardır.
1. ELEKTRİKSEL DEĞERLER :
Elektrik güç kaynağının doğru (DA) yada alternatif (AA) akım olduğunu, AA ise gerilime ek
olarak frekans (Hertz) ve faz sayısını da belirlemeliyiz.
2. MOTOR :
Motor ; elektriksel değerlere uygun olmalı ve beygir gücü (HP) cinsinden makine yüküne
uygun güçte olmalıdır. Motorun hızı ve Tork’u da önemlidir. Motora uygun koruma seçmek
için, motor etiketinde bulunan tam yük akımının değeri, hizmet faktörü, zaman değeri (çalışma)
ve motorun etiketinde gösterilen diğer önemli bilgiler dikkate alınmalıdır.
1
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
3. KONTROL (DENETLEYİCİNİN) SİSTEMİNİN ÇALIŞMA KAREKTERİSTİKLERİ :
Bir motor denetleyicisinin yada kontrol sisteminin temel görevi ; motoru çalıştırmak, durdurmak
ve motoru, makinayı, sistemi, çalışanı ve işlenen ürünü korumaktır. Denetleyici ; motoru,
düşük akım ve Tork’ta yada değişik hızlarda çalıştırma, dönüş yönünü değiştirme, kesikdarbeli çalıştırma ve ani durdurma gibi ek işlevleri sağlayan cihaz olarak söyleyebiliriz.
(Kontrol sist. çalışma işlevi)
4. ÇEVRE :
Kontrol sistem kutuları, üzerindeki akım taşıyan parçaların çalışan personele temasını
önleyerek koruma sağlar. Bazı uygulamalarda sistem aşağıda belirtilen muhtemel çevre
değişikliklerine karşı kendisini korumalıdır.
•
•
•
Su, yağmur, kar
Kir ya da yanıcı olmayan toz
Kesme yağları, soğutma sıvıları ya da yağlama sıvıları
5. ELEKTRİKSEL YÖNETMELİKLER VE STANDARTLAR :
Motor kontrol donanımı, Ulusal Elektrik Yönetmeliklerinin şartlarına göre tasarlanır. Ayrıca,
motorlar ve kontrol elemanları kurulurken bölgesel yönetmeliklerde dikkate alınmalıdır.
2.2. (DENETLEYİCİLER) KONTROL SİSTEMLERİN AMACI
Kontrol sistemlerinin kuruluşu aşamasında ; kontrol elemanlarının seçimi ve kurulmasında göz önüne
alınması gereken faktörler aşağıdaki gibidir.
1) YOL VERME :
Motorlara, doğrudan gerilim kaynağına bağlanarak yol verilebilir. Motorlara yavaş ve kademeli
yol verme, sadece motoru korumakla kalmaz besleme hattının ani akım darbeleri ile aşırı
yüklenmesini de önler. Çalıştırılan makinaların bazıları, ani bir döndürme kuvvetiyle çalışmaya
başlatıldığında zarar görebilir. Bir motora yol verme sıklığı, kontrol sisteme etki eden diğer bir
faktördür.
2) DURDURMA :
Kontrol sistemlerinin çoğu , sistemin yada motorların değişik şekillerde durdurulmasına izin
verir. Bazıları, makinanın, kısa sürede durması gerektiği durumlarda frenleme düzenini
çalıştırır veya mesela yük asansörlerinin çalışmasını yavaşlatacak ve makinanın merkezkaç
etkilerini geciktirerek hareketin durmasına yardım ederler.
3) DÖNÜŞ YÖNÜNÜ DEĞİŞTİRME :
Kontrol sistemlerinde ; otomatik olarak ya da elle kumanda edilerek dönüş yönünün
değiştirilmesi arzu edilir.
4) ÇALIŞTIRMA :
Arzu edilen çalışma hızının ve karakteristiklerinin sabit kalması, kontrol sisteminin öncelikli
amacı ve görevidir. Kontrol sistemi, makinanın çalışması sırasında motoru, makineyi,
2
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
malzemeyi ve çalışanı korur. Çalışma süresince olabilecek muhtemel, tehlikelere karşı
donanımı, çalışanı endüstriyel ürünü ve işlemleri koruyacak olan çeşitli tipte güvenlik devreleri
ve elemanları bulunmaktadır.
5) HIZ KONTROLÜ :
Bazı kontrol sistemleri, endüstriyel işlemler için çok hassas hız sağlayabilir. Bazıları ise belirli
hız sınırları içerisinde motorların hızını kademeli ya da seri artışlarla değiştirilebilir.
6. ÇALIŞMA GÜVENLİĞİ :
Elektriksel koruma elemanları, bir çok mekaniksel güvenlik araçlarının yerini almış ya da
onlara yardımcı olmuştur. Kontrol sistemleri elektrikli pilot kontrol elemanları; güvenli olmayan
şartlarda sistemde çalışanları korurlar.
7. TEHLİKEYE KARŞI KORUMA :
Bir otomatik sistem; çalışmasının bir parçası olarak kendisini ve ürettiği ya da işlediği
malzemeyi korumalıdır. Örneğin; belirli bir makinanın kontrol işlevi, taşıyıcı bantlardaki
karmaşıklıkları önlemek olabilir.
8. YOL VERME ŞARTLARININ SAĞLANMASI :
Bir kez kurulan ayarlandıktan sonra motor yol vericileri, güç sistemine ve çalıştırılan makinaya
uygun yol verme zamanı, gerilimi, akımı, ve torku ile güvenle çalışmasını sürdürecektir.
Yönetmelikler belirli sistemler için uygun iletkenlerin, yol verme sigortalarının, devre
şalterlerinin ve ayırıcı şalterlerinin seçimini düzenler.
2.3. ELLE KONTROL
Elle kontrol ; çalışması mekanik araçlarla yapılan bir kontrol çeşididir. Mekanizmayı çalıştırmak için
gerekli olan kuvvet, her zaman bir insan eliyle gerçekleştirilir. Aşağıdaki elemanların herhangi biri
kullanılarak bir motor elle kontrol edilebilir.
Devrilmeli Anahtar
Elle çalışan bir elektrik anahtarıdır. Küçük motorların çoğu devrilmeli anahtarlarla çalıştırılabilir.
Yani, manyetik anahtarlar ya da yardımcı donanım kullanmadan bu anahtarlarla motor
doğrudan çalıştırılabilir.
Tambur Denetleyiciler
Tambur denetleyiciler, genellikle AA ve DA motorların hızını kontrol etmek ve motorların dönüş
yönünü değiştirmek için kullanılan döner, elle çalıştırılan anahtarlama elemanlarıdır. Bunlar,
özellikle, sık sık çalıştırma, durdurma ya da dönüş yönü değiştirmenin gerekli olduğu yerlerde
kullanılır. Küçük güçlü motorlarda kullanılır.
Yüzey Kontaklı Kontrol
Yüzey kontaklı denetleyiciler, yıllarca DA motorlara yol verme için kullanılmıştır. Bunlar AA
endüksiyon motorlarının hız kontrolü içinde kullanılmıştır. Yüzey kontaklı kontrol , yalıtılmış bir
3
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
plakanın ön yüzeyindeki bir seçme kolunun kenarlarına yerleştirilen çok sayıda anahtarlama
kontaklarından meydana gelir. Dirençler arka panele yerleştirilmişlerdir.
2.4. UZAKTAN VE OTOMATİK KONTROL
İtmeli butonlarla uzaktan kontrol yapıldığında, ya da otomatik elemanların elektriksel kapasiteleri,
motorun yol alma ve çalışma akımlarını taşıyamayacak durumda olduğunda manyetik anahtarlar
kullanılır. Manyetik anahtarlı kontrol, çalışması elektromanyetik elemanlarla gerçekleştirilen bir
devredir.
Sistem otomatik olarak kontrol edilecekse aşağıdaki iki uçlu pilot elemanlar kullanılır.
1)
2)
3)
4)
5)
6)
Seviye Anahtarları ,
Basınç Anahtarları ,
Zaman Saatleri ,
Termostatlar ,
Sınır Anahtarları ,
Elektriksel ya da Mekaniksel Kitleme ve Sıralı Kontrol ,
Şimdiye kadar bahsedilen elektrik kontrol elemanlarının çoğu ; birbiriyle kilitlemeli olarak bağlanabilir.
Böylece sistemin çalışması her bir kontrol elemanının elektriksel konumuna bağlı olacaktır. Örneğin ;
Bir seviye anahtarı daha fazla sıvı gerektiğini bildirerek, ancak bir basınç anahtarı ya da zaman saati
çalışıncaya kadar gerekli sıvı sağlanamayacaktır.
2.5. BAŞLATMA – DURDURMA
Bir motoru ve motora bağlı makinayı durdurma ve başlatmada motoru etkileyebilecek bazı şartlar
vardır. Bunlardan bazıları şunlardır ;
1) Başlatma ve Durdurma Sıklığı :
Motor yol vericileri ile röleler ve kontaktörler gibi manyetik anahtarlar, binlerce kez tekrarlı
açma ve kapama nedeniyle bozulabilirler. Arıza aranırken ilk anda bu tip elemanların arızasına
bakılmalıdır.
Kesik çalıştırma yada ani durdurmak gereken bir sistemde, seçilen elemanlar büyük kapasiteli
olarak seçilmelidir.
2)
Hafif ve Ağır Yükte Başlatma :
Bazı motorlar boşta, bazıları da yük altında başlatılabilir. Motorlar başlatıldığında elektrik
dağıtım sistemini de etkileyen besleme hattı arızaları oluşabilir.
3) Hızlı yada Yavaş Başlatma :
Bir AA. Motorunun rotorunda maksimum döndürme kuvveti elde etmek için en uygun başlatma
koşulu motora tam gerilim uygulamaktır. Ancak bu durumda, ani hareketlenme nedeniyle
makine zarar görebilir. Bu tür akıya sebep vermemek için motoru düşük hızda başlatan ve
kademeli olarak hızını arttıran yol vericiler kullanılır.
4) Hızlı yada Yavaş Durdurma :
4
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Çoğu motorların kendiliğinden durmasına izin verilebilir. Ancak güvenlik nedeniyle veya üretim
gereği bir makinayı mümkün olduğu kadar kısa sürede durdurmak gerekir. Bu işlemler çeşitli
şekilde, (mekanik, elektriksel frenleme vb. ) gerçekleştirilebilir. Yavaşlatma kontrolu ise kontrol
sisteminin önemli görevlerinden birdir.
5) Tam Durdurma :
Bir asansör kesin olarak doğru bir noktada durdurulmalıdır ki bu nokta zemin seviyesine göre
ayarlanır. Bu tür durumlar, kontrol sistemlerine bağlanan otomatik elemanlarla sağlanır.
2.6. MOTORLARIN HIZ KONTROLÜ
Hız kontrolü, sadece motora yol vermekle değil normal çalışma anındaki motor hızını kontrol etmek
yada devam ettirmekle de ilgilidir. Hız kontrolünde dikkat edilecek bazı şartlar vardır.
a) Sabit hız
Sabit hızlı motorlar su pompalarında kullanılır. Sabit hızın korunması, değişik yük şartlarındaki
motor – generatör grupları için önemlidir. Hız değiştirmenin en kolay yolu dişlilerdir. Bir sincap
kafesli endüksiyon motorunun miline dişli takımları ( redüktör ) bağlanarak istenilen hız elde
edilebilir.
b) Değişken hız
Değişken hız, genellikle vinçlerde ve yük asansörlerinde tercih edilir. Bu tp uygulamalarda,
yük artarken motor hızı düşer ve yük azalırken motor hızı artar.
c) Ayarlanabilir hız
Motor çalışırken, motor hızı geniş sınırlar içersinde ayarlanabilir ve ayarlanılan çalışma
hızında sistem sabit kalır.
d) Çok kademeli hız
Bir torna tezgahında olduğu gibi çok hızlı motorların hızı, iki yada daha fazla belirli değerlere
ayarlanabilir. Motor bir kez belirli bir hız kademesine ayarlandıktan sonra, motor yükü değişse
de pratik olarak hız sabit kalacaktır.
2.7. KORUYUCU ÖZELLİKLER
Kurulacak bir tesiste ne gibi koruyucu özelliklere ihtiyaç duyulduğunu belirlemek için her bir motorun
ve kontrol tesisinin belirli bir uygulaması göz önüne alınmalıdır.
1- Aşırı Yük Koruması
Normal çalışma koruması ile aşırı yük koruması aynı şeyi gösterir. Bu koruma motorun bir
parçası olabilir ya da ayrıca koruma yapılabilir. Böylece motorun maksimum güç vermesini
sağlarken motorun yanması da önlenecektir. Aşırı yüklenme ; makinanıın mekaniksel aşırı
yüklenmesi, düşük besleme gerilimi, çok fazlı sistemlerde bir fazın kesilmesi, çok fazla
aşınmış yataklar, gevşek uç bağlantıları, yetersiz soğutma gibi motor problemlerinden
oluşabilir.
5
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
2- Açık İkaz Devresi Koruması
DA. Şönt ve kompund sargılı motorlar, ikaz sargılarının açık devre olmasına karşı ikaz devresi
röleleriyle korunabilir. DA.motorlarının bazıları ikaz devresinin açılması durumunda çok
tehlikeli hızlara çıkarabilir.
3- Faz Kesilmesine Karşı Koruma
3 ∼ fazlı sistemlerde faz kesilmesine ; yanan bir sigorta, bir açık devre, bir hattın kopması yada
diğer etkenler neden olabilir. Eğer faz kesilmesi motor dururken ve yol vermeye başlarken
oluşursa stator akımı çok artacak ve bu yüksek değerinde kalacaktır, ancak motor
dönmeyecektir. Sargılar yanacaktır. Motor normal çalışırken faz kesilmesiyle tehlikeli durumlar
oluşur. Bu durumda motor çalışmasını devam ettirebilir. Fakat tork, motorun dönmesini
sağlayamayacak bir değere kadar düşebilecektir.
4- Faz Değişmesine Karşı Koruma
3 ∼ fazlı endüksiyon motorunu besleyen fazlardan ikisi yer değiştirirse motor ters yönde
dönecektir. Bu ani yön değişikliği büyük zararlara sebep olabilir. (mil kırma, sargı yakma vb ) .
faz kesilmesi yada faz değişmesi nedeniyle oluşabilecek tehlikelerden motorları ve çalışanları
faz kesilmesi ve faz değiştirme röleleri kullanılır.
5- Aşırı Hız Koruması
Aşırı motor hızı çalıştırılan makinaya işlenen malzemeye yada motora zarar verir. Kağıt ve
baskı atölyelerinde, demir çelik endüstrisinde, üretim fabrikalarında tekstil sanayiinde
kullanılan kontrol donanımlarında aşırı hız koruması sağlanmalıdır.
6- Mekaniksel Koruma
Kontrol elemanlarının kutuları elemanın ömrünü arttırır ve motor ile kontrol sisteminin
problemsiz şekilde çalışmasını sağlar. ( gaz geçmeyen, toz ve sugeçirmez, paslanmaz vb. )
7- Kısa Devre Koruması
Sigortalar ve devre şalterleri gibi aşırı akım elemanları; motor devresi iletkenlerini ve motor
kontrol araçlarını, oluşan kısa devre aşırı yol verme akımlarına karşı ise motorun kendisini
korumak için kullanılır.
3. SEMBOLLER
Elektriksel donanımın her birinin bir devrede nasıl bağlı olduğunu göstermek için, donanımın
resimlerden ziyade sembolleri kullanılır. Semboller temsil ettikleri elemanın fiziksel görünüşüne
benzemeyecekleri için ezberlenmeleri gerekmektedir.
Elektrikli cihazlar ve elemanlar için standart semboller geliştirilmiştir. Ancak bu semboller tam evrensel
değildir ve bazı endüstrilerde değişik sembollere kullanılabilir. Tam standart olmamasına rağmen
aşağıdaki semboller NEMA ( Ulusal Elektrikli Cihazlar Üreticiler Birliği ) tarafından geliştirilen
standartlara uygundur.
6
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
7
Elektromekanik Kumanda Sistemleri / Ders Notları
3.1. DEVRE ÇİZİM KURALLARI
8
Yz: Hakan ATABEK
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Yukarıdaki kontrol devresinin hat şeması devrede kullanılan her bir elemanın sembolü
gösterilmektedir. Diğer sembollerden ise : ayırıcı şalter, hat geriliminden donanımı
ayırmak için kullanılır. Bu genelde sistem yüksüzken yapılır. Yüklü iken ise
kontaktörlerle, motor yol vericilerle yada devre şalterleri gibi devre kesicileri ile
devreden çıkarılır.
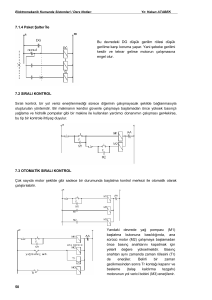
Bazı makinalar ayak anahtarlarıyla çalıştırılır. Ayak anahtarlarının kullanılması, makine
çalışanlarının ellerinin serbestçe kullanabilmesine izin verir. Kalıcı kontaklı itmeli
butonlar, seçilen konumda mekaniksel olarak tutulur.
İtmeli pilot test lambaları, lambanın ve devrenin sağlam olduğunu anlamak için
kullanılır. İtme konumunda lamba, kontrol geriliminin uçlarına bağlanır. Normal
konumda ise lamba, bir makine yada pompa motorunun çalışma yada durma
konumunda olduğunu gösterecek şekilde bağlanabilir.
Gecikmeli kontaklarda ( Zaman rölesi ) röle bobini enerjilendiğinde, kontakların
çalışmasında bir zaman gecikmesi vardır veya bobin enerjisi kesildiğinde bir zaman
gecikmesi vardır.
Şönt bobin; uygulanan tam gerilime doğrudan bağlanır. Seri bobin ise, yüke yada tam
akıma seri olarak bağlanır.
Mekanik bağlantılar, düz – kesik çizgilerle gösterilir ( Bunlar yalıtılmış ve akım
taşımayan parçalardır) .
9
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Bağlantı şemalarının çiziminde iletkenleri kesiştirme uygun bir pratik değildir. Ancak
kesişme zorunda olan iletkenler arasında bağlantı olmadığı anlaşılmalıdır. Eğer bir
bağlantı varsa, ek yerine kalın bir nokta yada düğümle gösterilir.
4. KONTROL ve KUMANDA ELEMANLARI
Elektrik makinalarının ve elektrikli aygıtların çalıştırılmasında kullanılan elemanlara kumanda
elemanları adı verilir. Temel ve başlıca olarak kullanılan elemanlar aşağıdaki gibidir.
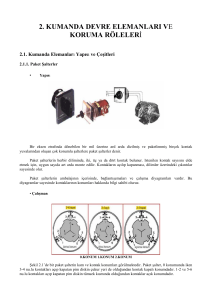
4.1. KUMANDA ELEMANLARI
4.1.1. BUTON
Röle ve kontaktörleri çalıştıran veya durduran kumanda elemanlarına buton adı verilir.
Butonlar yapılarına göre durdurma, başlatma ve iki yollu olmak üzere 3 kısma ayrılırlar.
Butonlar çalışma şekillerine göre kalıcı ve ani temaslı olmak üzere 2 kısma ayrılırlar. Kalıcı butona
basıldığında buton konumunu değiştirir, kalıcı buton serbest bırakıldığında, normal konumuna
dönmez. Başka bir kumanda elemanı kalıcı butonu tekrar normal konumuna döndürür. Bu eleman bir
aşırı akım rölesi veya bir durdurma butonu olabilir. Ani temaslı butona basıldığında, buton konumunu
değiştirir, bırakıldığında normal konumuna döner.
4.1.2. SİNYAL LAMBALARI
Bir kumanda devresinin veya kumanda elemanının çalışıp çalışmadığını gösteren elemana sinyal
lambası denir. Sinyal lambaları neon veya akkor telli olabilir. 220 voltta veya düşük gerilimlerde
çalışanları vardır.
4.1.3. MİKRO ANAHTARLAR
Buzdolaplarının veya arabaların içinde bulunan lambalar, kapı kenarlarına bağlanan mikro anahtarlar
ile yakılıp söndürülürler. Mikro anahtarların yapıları çok küçüktür. Bu nedenle mikro anahtarlar zaman
rölelerinde, program şalterlerinde, vitrin otomatiklerinde, basınç anahtarlarında ve bunun gibi bir çok
yerde kullanılırlar. Mikro anahtarlarda genellikle normalde açık veya kapalı bir kontak bulunur.
Bazılarında ise çift kontak bulunur.
10
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
4.1.4. RÖLELER
Küçük güçteki elektro-manyetik anahtarlara röle denir. Röleler elektro-mıknatıs, palet ve kontaklar
olmak üzere 3 kısımdan oluşurlar. Elektro-mıknatıs, demir nüve ve üzerine sarılmış bobinden
meydana gelir. Bobini doğru akıma bağlanan rölelerde, demir nüve yumuşak demirden ve bir parça
olarak yapılır. Bu rölelerde artık mıknatısiyet nedeniyle paletin demir nüveye yapışık kalması, nüvenin
ön yüzüne konmuş plastik pulla önlenir. Alternatif akımda ise demir nüve saç paketten oluşur.
Alternatif akımın zamana bağlı olarak yön Değiştirmesi rölelerde titreşime neden olur. Bu yüzden
rölenin titreşim yapmaması için nüvenin ön yüzüne açılmış oyuğa yerleştirilen bir bakır halkayla
önlenir. Bobin bir veya daha fazla sargıdan oluşabilir. Bunda rölenin değişik gerilimlerde
kullanılmasına olanak verir. Röledeki kontaklar paket aralığı ile açılır ve kapanırlar. Rölenin bobinine
enerji verildiğinde röle enerjilenir ve paletini çeker. Bu sayede kontaklar konum değiştirir.
4.1.5 . KONTAKTÖRLER
Büyük güçteki elektro-manyetik anahtarlara kontaktör denir. Kontaktörlerde elektro-mıknatıs, palet ve
kontaklar olmak üzere 3 kısımdan oluşur. A.A.’da nüve silisli saçlardan oluşur. D.A.’da ise nüve
yumuşak demirden yapılır. Yapısı hemen hemen röleler ile aynıdır. Palet A.A.’da silisli saçların
paketlenmesiyle, D.A.’da yumuşak demirden yapılır. Palet kontaktörde bulunan kontakların açılıp
kapanmasını sağlar. Yay veya yerçekimi kuvveti, paleti demir nüveden uzakta tutar. Bobin
enerjilendiğinde, demir nüve paleti çeker ve kontaklar durum değiştirir. Kontaktörlerde normalde açık
ve normalde kapalı olmak üzere iki çeşit kontak vardır. Kontakların yapımında gümüşün, bakır nikel,
kadmiyum, demir, karbon, tungsten ve molibden yapılmış alaşımlar kullanılır. Kontaktörlerde bulunan
kontaklar ana ve yardımcı olmak üzere iki kısma ayrılır. Ana kontaklar yük akımını, yardımcı kontaklar
kumanda devresinin akımını taşırlar. Kontaktörün kullanıldığı devrede akım yüksekse, kontaklar
birbirine paralel olarak bağlanır. Devre gerilimi yüksekse ve kontaklar arasında ark meydana geliyorsa,
kontaklar birbirine seri bağlanır.
11
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
Şekildeki devrede başlatma butonu açıkken A kontaktörü enerjilenmez. Bu durumda A1 kontağı açık
ve L1 lambası sönüktür. A2 kontağı kapalı olduğundan L2 lambası yanmaktadır. Başlatma butonuna
basıldığında A kontaktörü enerjilenir. Normalde açık olan A1 kontağı kapanır ve L1 yanar, normalde
kapalı olan A2 kontağı açılır ve L2 söner.
4.1.6. AŞIRI AKIM RÖLELERİ
Aşırı akımların elektrik motorlarına vereceği zararları önlemek için kullanılan elemanlara aşırı akım
röleleri adı verilir. Elektrik devrelerinde sigortalarda koruma görevi yaparlar. Çalışma karakteristikleri
nedeniyle sigortalar elektrik motorlarını koruyamazlar. Sadece hatları korurlar.
Aşırı akım röleleri motorlara seri olarak bağlanırlar. Yani bir aşırı akım rölesinden, motorun şebekeden
çektiği akım geçer. Çalışma anında motor kısa bir süre için normal değerinin üzerine çıkarsa, bu aşırı
akım motora zarar vermez. Aşırı akımın motordan sürekli olarak geçmesi, motor için sakınca yaratır.
Çünkü uzun süre geçen aşırı akım, motorun sıcaklık derecesini yükseltir ve motoru yakar. Bu yüzden
kısa süreli aşırı akım yükselmelerinde aşırı akım rölesinin motoru devreden çıkarmaması gerekir.
Örneğin; motorun yol alma anında motor kısa süreli fazla akım çekecektir bu sırada aşırı akım
rölesinin hemen devreyi açmaması için geciktirici elemanlar kullanılır.
Herhangi bir nedenle akım yükseldiğinde aşırı akım rölesi devreyi açarak kontaktörün enerjisini keser
ve motoru yanmaktan korur. Aşırı akım nedeni ile devreyi kesen bir aşırı akım rölesi üzerindeki kurma
butonuna basılarak eski haline getirilir. Bir fazlı veya D.A. devrelerinde aşırı akım rölesi tek hat
üzerine, üç fazlı devrelerde her faz üzerine konur. Aşırı ak. rölelerinin manyetik ve termik olmak üzere
2 çeşidi vardır.
a- Manyetik Aşırı Akım Röleleri:
Motor akımının manyetik etkisi ile çalışan aşırı akım rölelerine, manyetik aşırı akım rölesi denir
Bir manyetik Aşırı akım rölesi elektro-mıknatıs, kontak ve geciktirici eleman olmak üzere 3
kısımdan oluşur. Elektro-mıknatısın bobini güç devresinde motora kontaktör üzerinden seri
bağlanır. Yani bobinden motorun akımı geçer. Aşırı akım rölesinin normalde kapalı kontağı
kumanda devresinin girişine konur. Bu kontak açıldığında kumanda devresinin akımı kesilir ve
motor durur. Kısa süreli aşırı akımlarda örneğin motorun yol alma anında, rölenin çalışıp
kontağını açması, yağ dolu silindir içinde hareket eden bir pistonla önlenir. Aşırı akım rölesinin
bobininden normalden fazla akım seçtiğinde, bobin demir nüveyi yukarıya doğru çeker. Silindir
içinde bulunan piston nedeniyle, demir nüvenin hareketi yavaş olur. Eğer aşırı akım normale
düşmezse aşırı akım rölesinin kontağı açılır.
12
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
b- Termik Aşırı Akım Röleleri:
Motor akımının yarattığı ısının etkisiyle çalışan aşırı akım rölelerine, termik aşırı akım rölesi
denir. Termik aşırı akım rölelerinin endirekt ısıtmalı, direkt ısıtmalı ve ergiyici alaşımlı olmak
üzere 3 çeşidi vardır.
b.1- Endirekt ısıtmalı termik aşırı akım rölesi ; ısıtıcı, bimetal ve kontak olmak
üzere 3 kısımdan oluşur. Isıtıcı motora seri olarak bağlanır. Motora zarar verebilecek uzun
süreli bir aşırı akım ısıtıcıdan geçerse, meydana gelen ısı bimetali sağa doğru büker. Bimetal
kapalı kontağı açar. Dolayısıyla kontaktör ve motor devreden çıkar. Motor korunmuş olur. Eğer
aşırı akım kısa süreli olursa meydana gelen ısı bimetali bükmeye yeterli olmayacaktır.
Endiretk ısıtmalı termik aşırı akım röleleri akım değerleri, büyüdükçe, ısıtıcı telin ve dolayısıyla
bimetalin ölçüleri de büyür. Büyük akımlar için endirekt ısıtmalı termik aşırı akım röleleri
kullanışlı ve ekonomik olmaz. Bu nedenle akım şiddeti büyük olan termik aşırı akım röleleri
direkt ısıtmalı olarak yapılırlar.
b.2- Direkt ısıtmalı termik aşırı akım rölelerinde; ısıtıcı eleman bulunmaz. Motor akımı
bimetal üzerinden geçer. Aşırı akım geçtiği zaman bimetal bükülüp kontağını açacaktır.
13
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
4.1.7. MANYETİK AÇAKLAR
Aşırı akım röleleri gecikmeli çalışan açıcılardır. Devre açılıncaya kadar devreden geçecek büyük
değerdeki akım, geçtiği her yere zarar verir. Aşırı akım rölelerindeki bu sakıncayı karşılamak için,
motor devrelerinde aşırı akım rölesinden başka bir de manyetik açaklar kullanılır. Motor devresinden
aşırı akım geçtiği zaman önce manyetik açak devreyi açar. Devreye seri olarak bağlanır.
4.1.8. ZAMAN RÖLERİ
Zaman rölelerinin kontakları, Röle bobini enerjilendikten sonra gecikmeli konum değiştirecek şekilde
düzenlenmiştir.
Birçok endüstriyel kontrol uygulamalarında zaman ayarı yapılabilen ve isteğe uygun hizmet yapabilen
zaman rölelerine ihtiyaç duyulur. Belirli bir uygulamaya uygun zaman rölesini seçebilmek için öncelikle
yapılacak hizmeti istekleri belirlenmeli ve mevcut elemanların çalışma karakteristikleri bilinmelidir. Çok
çeşitli uygulamalar için uygun özelliklerine sahip bir çok zaman rölesi üretilmektedir.
4.1.8.1 Pistonlu Zaman Rölesi
Pis. Düz zaman rölesi
Pis. Ters zaman rölesi
Zaman gecikmesi bir pistonla sağlanan zaman rölelerine pistonlu zaman rölesi denir. Pistonlu düz
zaman rölelerinde bobin enerjilendiğinde pistonu yukarı doğru çeker, 3-4 kontakları açılır ve 1-2
kontakları hemen kapanır. Piston daha yavaş hareket eder. Çünkü B boşluğundaki akışkanın (yağ
14
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
veya hava) C kanalı ve ayarlı D deliği yoluyla A boşluğuna geçmesinde karşılaştığı direnç pistonun
hareketini yavaşlatır. Bu nedenle 5-6 ve 7-8 kontakları gecikmeli konum değiştirir. Enerji kesildiğinde
palet ve piston hızla aşağı düşerler. Piston üzerindeki klapesi pistonun hareketinde açılır.
A boşluğundaki akışkan klape deliğinden B boşluğuna kolayca geçer. Dolayısıyla piston hızla aşağıya
iner ve kapalı kontaklar açılır, açık kontaklar kapanır. Zaman ayarı D deliğinin küçültülüp
büyütülmesiyle ayarlanır.
Pistonlu ters zaman rölesinde ise bobin enerjilenince bütün kontaklar hemen konum değiştirir. Enerji
kesilince ise 1-2 ve 3-4 hemen konum değiştirir, 5-6 ve 7-8 gecikmeli olarak değiştirir.
4.1.8.2 Motorlu Zaman Rölesi
Bir kontrol kesin bir durma ve çalışma işlemlerine yada ardışık işlemler sırasına sahipse genellikle
motorlu zamanlayıcılar kullanılır.( Çamaşır makinalarının motorunun bir ters bir düz çalışması gibi )
Motorlu zaman rölelerinin bir çok çeşidi vardır. Şekildeki motorlu zaman rölesinde senkron motor
kullanılmıştır. Motor çalışmaya başlayınca dişliler döner. A dişlisi çok yavaş bir şekilde ok yönünde
döner ve P pimi bir süre sonra kontak çubuğuna vurur. Kontak çubuğu E noktası etrafında döner ve
kontaklar konum değiştirir.
Motorun çalışmaya başladığı anı ile kontakların konum değiştirmesi arasında bir gecikme olmuştur.
Pim çubuğa vurduğu zaman motor frenlenir ve durur. Motor durduktan sonra bir yay P pimini ilk
konumuna getirir. Bu zaman röleleri sadece düz zaman rölesi olarak çalışır. Zaman ayarı bir vida
yardımı ile yapılır. Vida P piminin yerini değiştirerek zaman ayarını yapar.
4.1.8.3 Kondansatörlü Zaman Röleleri
Bir kondansatörün D.A. güç kaynağına bağlanarak yüklendiği ve sonra da röle bobini üzerine
boşaldığını düşünürsek, oluşan kapalı devredeki direncin, endüktansın ve kondansatörün
kapasitesinin değerine bağlı olarak bobinde indüklenen akım yavaş yavaş azalacaktır. Röle bobini ile
kondansatörün şekildeki gibi D.A. kaynağına paralel bağlanırsa kondansatör kaynak gerilimi ile
dolacak ve bobinden bir akım geçecektir. Devredeki anahtar açılarak bobin ve kondansatör birlikte
devreden çıkarıldığında bobin akımı şekildeki eğride görüldüğü gibi azalmaya başlayacaktır.
Röle; paletini I1 akımında bırakacak şekilde ayarlanırsa t1 zaman gecikmesi, akım I2 ‘ye düşünceye
kadar bırakmayacak şekilde ayarlanırsa t2 zaman gecikmesi elde edilir. Zaman gecikmesini
değiştirmek için ayarlı bir direnç kullanılır.
15
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
4.1.8.4 Elektronik Zamanlayıcılar
Elektronik zamanlayıcılarda zaman gecikmesi yarı iletken elemanlarla sağlanır. Elektronik
zamanlayıcılarda, zamanlamanın durumunu gösteren LED’ler bulunur. LED zaman rölesi enerjisizken
söner, enerjilenince yanar.
Örnek : Turn-off olarak çalışan bir elektronik zaman rölesi
Belirli bir uygulama için zaman rölesi seçerken aşağıdaki etkenler dikkate alınmalıdır.
a) İhtiyaç duyulan zaman gecikmesi
b) İhtiyaç duyulan zaman değeri (zaman aralığı)
c) İzin verilebilir hata
d) Maliyet
e) Diğer istekler (rölenin gerilimi, kontak akımı, boyutları vb.)
4.1.9. BASINÇ ANAHTARLARI
Basınca duyarlı çalışması gereken endüstriyel uygulamalarda basınç anahtarları kullanılır. Kaynak
cihazları, takım tezgahları, yüksek basınçlı yağlama sistemleri, motorlu pompalar ve hava
kompresörleri gibi havalı yada hidrolik makinaların değişik şekillerde kontrol edilmelerini sağlayan
çeşitli basınç anahtarları bulunmaktadır. Basınç anahtarlarının kontrol edebildiği basınç değerleri de
değişmektedir.
Örneğin küçük basınç değişikliklerini doğru
olarak algılamak ve kontrol etmek gerektiğinde
diyafram çalışmalı basınç anahtarları kullanılır.
2000 pound/inch2 ye kadar olan basınçlar için
metal körük çalışmalı anahtarlar 15000 psi’ye kadar
ise piston çalışmalı hidrolik anahtarlar uygun olur.
Genellikle tek kutuplu basınç anahtarları
kullanılır. Basınç ayarı yayın kuvveti ile
ayarlanabilir. Sistemdeki basıncın arzu edilen
seviyeye varıncaya kadar bir işlemin başlamasının
önlenmesi gereken sistemlerde ters etkili basınç
anahtarları kullanılır.
16
Elektromekanik Kumanda Sistemleri / Ders Notları
Yz: Hakan ATABEK
4.1.10.SEVİYE ANAHTARLARI
Bir deponun ya da tankın su ya da sıvı seviyesindeki değişikliklere göre bir pompa motorunun
çalıştırılıp durdurulması gerektiğinde seviye anahtarları kullanılır. Seviye anahtarları AA ve DA pompa
motorlarının manyetik yol vericilerinin otomatik kontrolünü ve küçük motorlu yüklerin doğrudan
otomatik kontrolünü yapabilecek şekilde tasarlanır.
Seviye anahtarlarının çalışması, bir sıvı
deposuna yerleştirilen seviye topunun aşağı ya
da yukarı hareketi iler kontrol edilir.
Seviye anahtarları, kontak düzeneklerine bağlı
olarak depo ya da tank pompalama işlemleri ya
da depo doldurma işlemleri için kullanılan bir
pompa motoruna bağlanabilir.
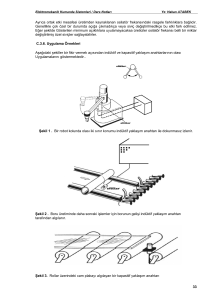
4.1.11. AKIŞ ANAHTARLARI
Akış anahtarları, bir boru içerisine sıkıştırılarak borudan geçen sıvı ya da gazın anahtarın pedalına
karşı geçmesiyle kontakları konum değiştiren bir kontrol elemanıdır. Akış anahtarları elektrik kontak
sistemlerini açar ya da kapatır. Kontaklar ise motor yol vericilerinin bobinlerini ya da işaret lambalarını
çalıştırmak için bağlanabilir. Akış anahtarlarında bir açık bir kapalı kontak bulunur.
Akış anahtarları; bir T eki ile boru hattına bağlanır. Akış anahtarları genellikle kimya ve petrol
endüstrisinde kullanılır. Buhar geçirmez anahtarlarla buhar geçirmez elektriksel bağlantılar
kullanılmalıdır. Bağlantı iletkenliklerindeki yalıtım, akışkanın sıcaklığına dayanabilmelidir.
Şekildeki devre bir akış anahtarının elektriksel
bağlantısını göstermektedir. Yeterli bir sıvı veya
gaz akışı ile akış anahtarının kontağı
kapandığında M kontaktörü enerjilenir ve
kontağını kapatarak motorunu çalıştır.
-
Şekildeki gibi hava kanallı ısıtma sistemlerindeki
elektrikli ısıtma elemanlarını enerjilemek içinde
kullanılabilir. Bu ısıtma elemanları yeterli hava
akışında normal değerlerinde çalışacak şekilde
tasarlanır. Yeterli hava akışı olmazsa ısıtma
elemanı bozulabilir.
17