Fatih Üniversitesi
Elektrik ve Elektronik Mühendisliği Bölümü
EEM 316 – Haberleşme I
DENEY 6
FM DEMODÜLATÖRÜ
6.1 AMAÇLAR
1. Faz kilitli çevrimin (PLL) prensibinin çalışılması
2. PLL LM565 ‘in karakteristiğinin anlaşılması
3. FM sinyalinin PLL kullanılarak demodüle edilmesi
6.2 ÖN ÇALIŞMA
Kitaptan 5. Üniteyi okuyunuz.
6.3 CİHAZLAR VE MALZEMELER
Deney için gerekli malzemeler Tablo 6.1’de listelenmiştir. Deneye başlamadan önce, deneyde
kullanılacak olan cihazların model numarasını, seri numarasını ve ofis stok numarasını
yazınız. Ayrıca, hasarlı cihazları not ediniz.
Tablo 6.1 Deneyde kullanılacak malzeme listesi
No: Malzemeler
1
Dijital Osiloskop
2
Sinyal Jeneratörü (1)
3
DC Güç Kaynağı
4
Osiloskop Probları ve Kablolar
5
LM565 PLL Devresi
Hasar ve diğer yorumlar:
Model
Seri No:
Ofis Stok No:
6.4 TEMEL BİLGİLER
Frekans demodülatörü (frekans diskriminatör) anlık frekans değişikliklerini lineer
voltaj değişimine dönüştüren devredir Haberleşme sistemlerinde kullanılan birçok çeşidi
vardır. Örneğin; FM’den AM’e dönüştürücü, dengeli, faz farkı diskriminatörleri ve faz kilitli
çevrim (PLL) frekans demodülatörü. Bu deneyde PLL frekans demodülatörünün çalışma
prensibini öğreneceğiz.
EEM 316 – Haberleşme I
Deney 6
Sayfa 1/11
6.4.1 Faz Kilitli Çevrimin (PLL) çalışma prensibi
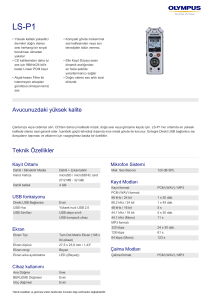
PLL, Şekil 6.1’de blok diyagramı gösterilen devre, çıkış ve giriş sinyallerini frekans ve
faz türünden kilitleyen geri dönüşümlü elektronik kontrol sistemidir. Radyo haberleşmesinde
eğer taşıyıcı sinyalin frekansı iletim esnasında sapmışsa, alıcı devredeki PLL taşıyıcı sinyal
frekansını otomatik olarak takip eder.
Şekil 6.1 PLL Blok Diyagramı
PLL, ilerideki deneylerde iki farklı şekilde kullanılmıştır: (1) demodülatör olarak, faz ve
freakans modülasyonunu takip etmek için ve (2) zamanla değişen taşıyıcı sinyalin frekansını
takip etmek için. Genellikle, PLL aşağıdaki bölümleri içerir:
a) Faz Detektörü (PD)
b) Alçak Geçiren Filtre (LPF)
c) Gerilim Kontrollü Osilatör (VCO)
PLL’in içindeki faz detektörü iki girişine kilitlenir ve iki giriş frekansı eşit ise çıkış olarak
sıfır verir. Eğer iki giriş sinyalinin frekansı eşit değilse, detektörün çıkışı AC kısmı kaldıran
alçak geçiren filtreden geçerken VCO girişine DC seviye uygulanır. Bu eylem geri besleme
döngüsünü kapatır. Çünkü; VCO girişine uygulanan DC seviye, VCO çıkış frekansını giriş
frekansıyla tamamen aynı olması için değiştirir. Eğer VCO çıkış frekansı giriş frekansına
eşitse, PLL kilitlenmeyi başarmıştır ve kontrol voltajı PLL giriş frekansı sabit olduğu
müddetçe sıfır olacaktır. Şekil 6.1’de gösterilen PLL parametreleri aşağıdadır:
Kd= faz detektör kazancı volt/radyan
Ka= yükseltici kazancı volt/volt
Ko= VCO kazancı kHz/volt
Kl= Kd Ka Ko = kapalı devre kazancı kHz/radyan
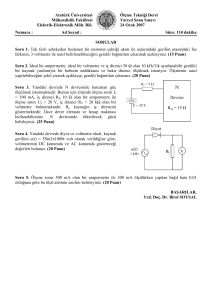
Faz detektörünün çalışma prensibinin daha iyi anlaşılması için basit XOR kapısının faz
detektörü olarak kullanıldığı düşünülebilir. XOR kapısı, girişleri karşılaştıran ve eşit
olmadıklarında darbe sinyali üreten eşitsizlik detektörü olarak düşünülebilir. Çıkış darbesinin
genişliği giriş sinyalinin faz hatası ile doğru orantılıdır. Şekil 6.2’de gösterildiği gibi; (b)’nin
çıkış darbesinin genişliği, (a)’dan büyük ve (c)’den küçüktür. Alçak geçiren filtrenin girişine
faz detektörünün çıkışı uygulandığı zaman, alçak geçiren filtrenin çıkışı darbe genişliği ile
doğru orantılı bir DC seviye olması gerekir. Başka bir deyişle, çıkış DC seviyesi giriş
sinyallerinin faz hatası ile orantılıdır. Şekil 6.2 giriş faz hatası ile çıkış DC seviyesinin
bağıntısını gösterir.
EEM 316 – Haberleşme I
Deney 6
Sayfa 2/11
Şekil 6.2 Faz algılaması
PLL’in çalışma prensibinin daha iyi anlaşılması için başlangıçta PLL’nin kilitli olması
durumu düşünülebilir. VCO giriş voltajı 2 V ve serbest hareketli frekansı 1 kHz olsun. Şekil
6.3’teki sinyalleri düşünün. Eğer VCO frekansı ve daha düşük frekanstaki (980 Hz) sinyal A
faz detektör XOR’un girişlerine uygulanırsa, daha dar olan çıkış darbesi alçak geçiren filtrenin
1 V’dan daha düşük çıkış voltajı elde etmesine sebep olur. Bu daha küçük voltaj VCO
frekansını giriş frekansına yaklaştırarak düşürür. Eğer VCO çıkış frekansı giriş frekansına eşit
olursa kilitlenme olur. Tersine, daha yüksek olan 1.2 kHz giriş sinyali B daha büyük olan 3 V
filtre çıkışına neden olur. Bu durum sonunda VCO çıkış frekansı giriş sinyaline kilitlenmek
için yükselir.
Şekil 6.3 Frekans kilitlenmesinin çalışma prensibi
EEM 316 – Haberleşme I
Deney 6
Sayfa 3/11
6.4.2 LM565 PLL Temel Karakteristikleri
LM565 genel amaçlı faz kilitli çevrimdir ve frekans demodülasyonunda yaygın olarak
kullanılmaktadır. LM565 ile tasrım yaparken önemli olan parametreler ileride belirtilmiştir
6.4.2.1 Serbest Hareketli Frekans
Şekil 6.4 LM565’li bir PLL devresini gösteriyor. Giriş sinyalinin yokluğunda VCO
çıkış frekansına serbest hareketli frekans denir. Şekil 6.4’teki PLL devresinde LM565’in
serbest hareketli frekansı zaman elemanları C2 ve VR1 ile aşağıdaki formülle bulunur:
1
3.7 VR1C 2
33.6 f o
Kapalı devre kazancı: K L = K d K a K o =
Vc
Serbest hareketli Frekans: f o =
(6.1)
(6.2)
Vc= devreye verilen toplam besleme voltajı= Vcc - ( - Vcc)=5V – (- 5V) = 10V.
Şekil 6.4 LM565 PLL devresi
6.4.2.2 Kilitlenme Menzili
Başlangıçta VCO herhangi bir frekansta çalışırken PLL zaten kilitlenmiş durumdadır.
Eğer giriş frekansı f i VCO frekansı f o ’dan uzaksa hala kilitlenme durumu meydana
gelebilir. Giriş frekansı belirli bir frekansa ulaştığında PLL kilitlenmeyi kaybeder. Bu
andaki f i ve f o frekans farkına döngünün kilitlenme menzili denir. Kilitlenme menzili
aşağıdaki formülle bulunabilir:
EEM 316 – Haberleşme I
Deney 6
Sayfa 4/11
fL =
8 fO
VC
(6.3)
6.4.2.3 Yakalama Menzili
Başlangıçta çevrim kilitlenmiş ve VCO herhangi bir frekansta çalışıyor olsun. Eğer
giriş sinyali f i , VCO frekansı f o ’a yakın olsa bile kilitlenmeme durumu oluşabilir. Giriş
frekansı PLL’in kilitlendiği belirli bir frekansa ulaştığı zaman f i ve f o frekans farkına
döngünün yakalama menzili denir. LM565’in yakalama menzili aşağıdaki formülle
bulunabilir (Şekil 6.5):
fc =
1
2π
2π x f L
3.6 x 10 3 x C 2
(6.4)
Şekil 6.5 Kilitlenme ve yakalama menzillerinin gösterimi
6.4.3 LM565 PLL’e Dayanan Frekans Demodülatörü
Şekil 6.4’teki PLL devresi frekans demodülatörü olarak kullanılabilir. Giriş sinyali
frekans cinsinden arttığı zaman, çıkış sinyali voltaj cinsinden düşer. Tersine olarak, eğer giriş
sinyali frekans cinsinden düşerse, çıkış sinyali voltaj cinsinden yükselir.
LVI565 VCO devresi LM566’ya eşdeğerdir. VCO’nun serbest hareketli frekansı f o ,
dış parçalar C2 ve VR1 değerleriyle belirlenir. İç direnç 3.6 kΩ (pin7) ve dış kapasitör alçak
geçiren filtre oluşturur. Pin 7 ve 8 arasında bağlanan C4 frekans kompansasyon
kapasitörüdür.
6.5 DENEY UYGULAMASI VE KAYITLAR
Not: DO (dijital osiloskop) kullandığınızda; DO’dan verileri kaydederken, kritik tüm bilgileri
kaydedin. Örneğin; DC seviyesi, tepe değeri, periyot ve frekans değerleri. Sonrasında çıkış
dalga şeklini düzgün olarak DO çıkışı olarak dereceli grafiğe çiziniz. DO çıkışı sabitlemek
için “hold” ve ”storage” özelliklerini kullanınız.
EEM 316 – Haberleşme I
Deney 6
Sayfa 5/11
6.5.1 LM565 PLL’nin Karakteristik Ölçümleri
1. LM565 PLL devresini yerleştirin.
SW2 ’yi C2 = 0.1µF pozisyonuna getiriniz.
SW1 ’i
OFF
pozisyonuna
getiriniz.
2. VR1 ’i, VCO OUTPUT’unda maksimum serbest hareketli frekans f oh ve minimum
serbest hareketli frekans f ol elde edecek şekilde ayarlayınız. Sonuçları Tablo 6.2’ye
kaydediniz.
3. VR1 ’i VCO serbest hareketli frekansı f o = 2 KHz olacak şekilde ayarlayınız.
4. SW1 ’i ON pozisyonuna getiriniz. INPUT (Giriş)’a 0.5Vt-t, 2 KHz’lik kare dalga
bağlayınız.
5. INPUT ve VCO OUTPUT sinyallerini gözlemleyiniz ve giriş frekansını çıkış sinyali
kilitten çözülene kadar yavaşça arttırınız. Giriş frekansını f Lh olarak Tablo 6.2’ye
kaydediniz.
6. Giriş frekansını VCO’nun serbest hareketli frekansı f o ’a geri getiriniz. Giriş
frekansını çıkış sinyali kilitten çözülene kadar yavaşça azaltınız ve giriş frekansını f Ll
olarak Tablo 6.2’ye kaydediniz.
7.
f L = ( f Lh − f Ll ) / 2 eşitliğini kullanarak kilitlenme menzilini hesaplayınız.
8. Giriş frekansını VCO çıkışı kilitten çözülene kadar arttırınız. PLL kilitlenene kadar
giriş frekansını yavaşça düşürünüz. Giriş frekansı f Ch ’yi gözlemleyiniz ve sonucu
Tablo 6.2’ye kaydediniz.
9. Giriş frekansını VCO çıkışı kilitten çözülene kadar azaltınız. PLL kilitlenene kadar
giriş frekansını yavaşça arttırınız. Giriş frekansı f Cl ’yi gözlemleyiniz ve sonucu
Tablo 6.2’ye kaydediniz.
10. f C = ( f Ch − f Cl ) / 2 eşitliğini kullanarak yakalama menzilini hesaplayınız.
11. SW1 ‘i OFF pozisyonuna getiriniz. SW2 ’yi C2 = 0.1µF pozisyonuna getiriniz. 2. adımı
tekrarlayınız.
12. VR1 ’i VCO serbest hareketli frekansı f o = 20 KHz olacak şekilde ayarlayınız.
SW1 ’i ON pozisyonuna getiriniz. INPUT (Giriş)’a 0.5Vt-t, 20 KHz’lik kare dalga
bağlayınız. 6’dan 11’e kadar olan adımları tekrarlayınız.
EEM 316 – Haberleşme I
Deney 6
Sayfa 6/11
6.5.2 LM565 V-F Karakteristik Ölçümleri
1.
LM565 PLL devresini yerleştirin.
SW2 ’yi C2 = 0.1µF pozisyonuna getiriniz.
SW1 ‘i
OFF
pozisyonuna
getiriniz.
2. VR1 ’i VCO OUTPUT’taki serbest hareketli frekans f o = 2 KHz olacak şekilde
ayarlayınız.
3. SW1 ’i ON pozisyonuna getiriniz.
4. INPUT (Giriş)’a 0.5Vt-t, 2 KHz’lik kare dalga bağlayınız. PLL OUTPUT ‘u ölçünüz
ve Tablo 6.3’e kaydediniz.
5. Giriş frekansını sırasıyla 0.5 kHz, 1 kHz, 1.5 kHz, 2.5 kHz, 3 kHz ve 3.5 kHz
olarak değiştiriniz ve çıkış voltajlarını giriş frekanslarıyla ilgili olarak ölçünüz.
Sonuçlarınızı Tablo 6.3’e kaydediniz.
6. Çıkış voltajı – giriş frekansı grafiğini Şekil 6.9’a çiziniz.
7.
SW2 ’yi C5 = 0.01µ F pozisyonuna getiriniz.
8. SW1 ‘i OFF pozisyonuna getiriniz. VR1 ’i VCO OUTPUT’taki serbest hareketli
frekans f o = 20 KHz olacak şekilde ayarlayınız.
9. SW1 ’i ON pozisyonuna getiriniz.
10. INPUT (Giriş)’a 0.5Vt-t, 20 KHz lik kare dalga bağlayınız. PLL OUTPUT ‘u ölçünüz
ve Tablo 6.4’e kaydediniz.
11. Giriş frekansını sırasıyla 16.5 kHz, 17.5 kHz, 18.5 kHz, 21.5 kHz, 22.5 kHz ve
23.5 kHz olarak değiştiriniz ve çıkış voltajlarını giriş frekanslarıyla ilgili olarak
ölçünüz. Sonuçlarınızı Tablo 6.4’e kaydediniz.
12. Çıkış voltajı – giriş frekansı grafiğini Şekil 6.10’a çiziniz.
6.5.3 PLL Frekans Demodülatörü
1. LM566 FM Modülatör devresini yerleştirin. SW2 ’yi C4 = 0.01µ F pozisyonuna
getiriniz. VR1 ’i çıkış serbest hareketli frekansı f o = 20 KHz olacak şekilde
ayarlayınız.
2. LM565 PLL devresini SW2 ’yi C5 = 0.01µ F pozisyonuna getirerek tamamlayınız.
VR1 ’i VCO OUTPUT’taki serbest hareketli frekans f o = 20 KHz olacak şekilde
ayarlayınız.
EEM 316 – Haberleşme I
Deney 6
Sayfa 7/11
3. LM566 FM Modülatörün çıkışını (OUTPUT) LM565 PLL devresinin girişine
bağlayınız ve SW1 ’i ON pozisyonuna getiriniz.
4. LM566 FM Modülatörün AUDIO INPUT’a 300 mVt-t, 1 KHz’lik sinüs dalgası
bağlayınız. Osiloskop kullanarak LM565 PLL devresinin çıkış dalga formunu
gözlemleyiniz ve Tablo 6.5’e kaydediniz.
5. Adım 4’ü giriş frekansları 2 kHz ve 3 kHz için tekrarlayınız.
6. AUDIO INPUT’un genliğini 500 mVt-t’ye çıkarınız. Adım 4 ve 5’i tekrarlayınız
ve sonuçları Tablo 6.6’ya kaydediniz.
Tablo 6.2
C
fo
Serbest Hareketli
Frekans Menzili
f Oh
C2 = 0.1 µF
f Ol
Kilitlenme Menzili
fL
f Lh
Hz.
2 kHz.
Hz.
Hz.
fL =
Hz.
C5 = 0.01 µF
20 kHz.
Hz.
Hz.
f Ll
Yakalama Menzili
fC
f Ch
f Cl
fC =
Hz.
Hz.
Hz.
Hz.
Hz.
fL =
Hz.
fC =
2.0
2.5
3.0
Hz.
Hz.
Tablo 6.3
( Vm = 0.5 V pp , f o = 2 kHz , C2 = 0.1 µF )
Giriş
Frekansı
(kHz)
Çıkış Voltajı
(V)
EEM 316 – Haberleşme I
0.5
1.0
1.5
Deney 6
3.5
Sayfa 8/11
Çıkış
Voltajı
(V)
0.5
1.0
1.5
2.0
2.5
3.0
Giriş
Frekansı
(kHz)
3.5
Şekil 6.9 Çıkış voltajının frekans tarafından değiştirilmesi
Tablo 6.4
Vm = 0.5 V pp , f o = 20 kHz , C2 = 0.01 µF
Input
Frequency
(kHz)
Output
Voltage
(V)
16.5
17.5
18.5
20
21.5
22.5
23.5
Çıkış
Voltajı
(V)
16.5
17.5
18.5
20
21.5
22.5
23.5
Giriş
Frekansı
(kHz)
Şekil 6.10 Çıkış voltajının frekans tarafından değiştirilmesi
EEM 316 – Haberleşme I
Deney 6
Sayfa 9/11
Tablo 6.5
( Vm = 300 mV pp , f 0 = 20 kHz )
Giriş
Frekansı
Giriş Dalga Şekli
Çıkış Dalga Şekli
1 kHz
2 kHz
3 kHz
EEM 316 – Haberleşme I
Deney 6
Sayfa 10/11
Tablo 6.6
( Vm = 500 mV pp , f 0 = 20 kHz )
Giriş
Frekansı
Giriş Dalga Şekli
Çıkış Dalga Şekli
1 kHz
2 kHz
3 kHz
EEM 316 – Haberleşme I
Deney 6
Sayfa 11/11