T.C
KARADENİZ TEKNİK ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
LİSANS BİTİRME PROJESİ
YILDIRIM DEDEKTÖRÜ
Adı Soyadı
210382 BURKAY TAŞCI
210344 SAMET SOĞUKSULU
Danışman
YRD.DOÇ.DR. HAYDAR KAYA
Mayıs 2012
TRABZON
T.C
KARADENİZ TEKNİK ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
LİSANS BİTİRME PROJESİ
YILDIRIM DEDEKTÖRÜ
Adı Soyadı
210382 BURKAY TAŞCI
210344 SAMET SOĞUKSULU
Danışman
YRD.DOÇ.DR. HAYDAR KAYA
Mayıs 2012
TRABZON
LİSANS BİTİRME PROJESİ ONAY FORMU
BURKAY TAŞCI VE SAMET SOĞUKSULU tarafından YRD.DOÇ.DR HAYDAR
KAYA yönetiminde hazırlanan “YILDIRIM DEDEKTÖRÜ” başlıklı lisans bitirme projesi
tarafımızdan incelenmiş, kapsamı ve niteliği açısından bir Lisans Bitirme Projesi olarak
kabul edilmiştir.
Danışman
: Unvanı Adı ve SOYADI
Yrd. Doç. Dr. Haydar KAYA
Jüri Üyesi 1
: Unvanı Adı ve SOYADI
Prof. Dr. İ.Hakkı ÇAVDAR
Jüri Üyesi 2
: Unvanı Adı ve SOYADI
Yrd. Doç. Dr. Adnan CORA
Bölüm Başkanı
: Unvanı Adı ve SOYADI
Prof. Dr. İ.Hakkı ALTAŞ
ÖNSÖZ
Öncelikle bize projemizde hiçbir zaman destek ve yardımlarını esirgemeyen
hocamız Sayın Yrd.Doç.Dr. Haydar KAYA ‘ya her şey için teşekkürü bir borç biliriz. Bize
her zaman projemizle ilgili sorunlarımızda yardımcı olan Karadeniz Teknik Üniversitesi
Elektrik-Elektronik Mühendisliği Bölüm Başkanlığına içten teşekkürlerimizi sunarız.
Projemizde bizimle bilgi paylaşımı ve verileri internet üzerinden kendi sitesinde
görüntülememize izin veren Egon WANKE’ye teşekkürü bir borç biliriz.
Proje süresince maddi ve manevi desteklerini bizden esirgemeyen ailelerimize ve
bölüm hocalarımıza teşekkür ederiz.
Mayıs 2012
Burkay TAŞCI
Samet SOĞUKSULU
iv
İÇİNDEKİLER
Lisans Bitirme Projesi Onay Formu ……………………………………………… iii
Önsöz
……………………………………………… iv
İçindekiler
……………………………………………… v
Özet
……………………………………………… vii
Semboller ve Kısaltmalar
……………………………………………… viii
Şekiller Dizini
………………………………………………
ix
1. Giriş
………………………………………………
1
1.1 Projenin Amacı
....……………….
1
1.2 Projenin Konusu ve Kapsamı
.....………………
1
1.3 Yöntem
.………………
3
1.4 Çalışma Takvimi
.....……………
4
2.Teorik Altyapı
………………………………………………
5
………………
5
2.1.1 Yıldırım Olayı
..………………
5
2.1.2 Yıldırım Sinyalleri
………………
6
2.1.3Yıldırım Dedektörünün Tarihi
………………
7
2.1.4 Yıldırımın Yer Tesibiti
………………
7
2.1Yıldırım
2.2.Ferrit Çubuk Anten
………………………………………………
10
2.3.VLF Amplifikatör
………………………………………………
10
..………………
10
2.3.1.1 Filtre Seçenekleri
..………………
12
2.3.1.2 Kazanç Seçenekleri
..………………
13
2.3.1.3 Eklentiler
..………………
13
2.3.2 NE 5534 OP-AMP
..………………
13
2.3.3 CAT5 Network Kablo
..………………
14
2.3.1 Yapısı
2.4.Kontrol Paneli
………………………………………………
16
2.4.1.Yapısı ve Çalışması
..………………
18
2.4.2.Voltaj Regülatörü
..………………
19
2.4.3.FT232R USB UART Dönüştürücüsü
..………………
19
2.4.4. ATmega644A Serisi Mikroişlemci
..………………
20
2.4.5. DC Güç Kaynağı
..………………
22
2.4.6.EM-406A GPS Alıcısı
..………………
22
v
3.Sistem Tasarımı ve Çalışması
3.1.Kontrol Paneli LED’leri
………………………………………….. 24
.…………………………………………. 24
3.2. Kontrol Paneli Baud Hızı Ayarı
3.3.Veri Yükleme
…………………………………….. 24
.………………………………………… 25
4.Sonuçlar
………………………………………………
27
Kaynaklar
………………………………………………
28
EKLER
...........………………………………………
29
Özgeçmiş
………………………………………………
30
vi
ÖZET
Öncelikle projemizin adını söyleyecek olursak projemizin adı Yıldırım Dedektörü.
Adından da anlaşılacağı gibi projemizde Trabzonda ki yıldırım aktivitelerini gözlemleyip
yıldırım düşümünün olup olmayacağı ve eğer olacaksa da nerede ve ne zaman olacağı ile
ilgili araştırmalar yaptık. Öncelikle neden yıldırım dedektörü ile ilgili bir proje
hazırladığımızı söylecek olursak, en önemli nedeni yıldırımların dünya üzerinde önemli bir
can ve mal kayıplarına neden olduğudur. Ayrıca araştırmalarımıza göre ciddi bir proje
olarak henüz Türkiye’de yapılmamış olması bize bu proje hakkında önemli araştırmalar
yapmaya teşvik etti.
Proje temel olarak, havada var olan ve olması beklenen yıldırım aktivitelerinin
gözlemlenmesi, yer tespiti, tespit edilen verilerin anlık olarak işlenerek bilgisayar
sistemleri için anlamlı sayısal verilere dönüştürülmesi ve bu verinin açık-kaynak yayın
yapan blitzortung.org sitesine aktarımı ve bu siteden yayını üzerine kurulmuştur.
Projemiz temel olarak Avrupa’dan çıkmış bir projedir. Nedeni ise Avrupa’nın büyük
kısmının önemli yağış ve yıldırım potansiyeli olmasıdır. Projenin amacı birbirine yakın
aralıklarla oluşturmayı temel alan,düşük bütçeli bir yıldırım konumu ağı kurmak(50 km250 km ayrılmış).Ağı oluşturmak için gereken donanım ferrit çubuk anten ,bir VLF
amplifikatör, kontrol paneli,bir PPS sağlayan GPS alıcısı(saniyede bir pulse)sinyali,bir
sürekli internete bağlı kişisel bilgisayardır.
Temel olarak projemizde kullandığımız ferrit çubuk anten yıldırım işaretlerinin
tespitini, VLF amplifikatör antenden alınan işareti kullanabilmemiz için yükseltme işlemi,
kontrol paneli bu işareti sayısal olarak kullanabilmemizi, GPS yer tespiti ve son olarak PC
ise elde ettiğimiz son işareti internette görüntülemek üzere upload işlemini yapmaktadır.
vii
SEMBOLLER VE KISALTMALAR
VLF:
Very Low Frequency
GPS:
Global Positioning System
EMD:
Elektromanyetik Dalga
OP-AMP: Operational Amplifier
Km:
Kilometre
Hz:
Hertz
V:
Volt
A:
Amper
C:
Coulomb
°C:
Santigrad derece
RF:
Radyo Frekansı
dB:
Desibel
DC:
Doğru Akım
AC:
Alternetif Akım
ADC:
Analog-Dijital Dönüştürüzü
USB:
Universal Serial Bus
viii
ŞEKİLLER DİZİNİ
Şekil 1. Yıldırım dedektörü çalışma diyagramı
Şekil 2. Yıldırım dedektörü blok diyagramı
Şekil 3.Dört alıcılı bir sistemin oluşturduğu 3 hiperbolik eğrinin kesim noktası yıldırım
kaynağını verdiğini gösteren şekil
Şekil 4. Ferrit Çubuk Anten
Şekil 5. VLF Amplifikatör
Şekil 6. NE 5534 serisi OP-AMP
Şekil 7. CAT5 Network Kablo
Şekil 8. Kontrol Paneli
Şekil 9. FT232R USB UART Dönüştürücüsü
Şekil 10. Kullandığımız ATmega644A serisi mikroişlemci
Şekil 11. EM-406A GPS Modülü
ix
1.GİRİŞ
1.1.Projenin Amacı
Yıldırım olayları çok eski yıllardan beri çok ciddi can ve mal kayıplarına neden
olmuştur. Ayrıca çoğu zamanlarda yıldırımlar yağmur gibi doğa olaylarının habercisi
olmuştur. Bu nedenler insanları yıldırım dedektörü yapmaya teşvik etmiştir. Bizde
projemizde yıldırımların meydana gelmeden önce yer tespitini ve zaman tespitini yaptık.
Projemizin günlük hayattaki kullanıma bakacak olursak meteoroloji en önemli örneğidir.
Yapılan bu ölçümler günlük hayatta önemli yer tutmaktadır. Hava trafiğinde ve
denizcilikte yıldırım aktivitelerinin tespiti önemli yer tutar ve sürekli bu aktiviteler
gözlemlenir veya bilgi alınır.
Bizim bu projeyi yapmakta ki temel amaçlarımızdan biri henüz ülkemizde bu
sistemi bizim kadar geniş çaplı ve kapsamlı yapılmamış olmasıdır. Yıldırım dedektörümüz
ile Trabzon şehrinde ki yıldırım aktivitelerini gözlemleyerek internet üzerinden şehrimizde
yaşayan insanlara bilgi vermek diğer temel amacımızdır.
Yıldırım olayları birçok kez yağmurun da habercisi olduğu için Trabzon şehrinin yağmur
durumu hakkında da bize bilgi sağlayacaktır.
1.2.Projenin Konusu ve Kapsamı
Projemizin konusu birbirine yakın aralıklarla oluşturmayı temel alan, düşük bütçeli bir
yıldırım konumu ağı kurmaktır(50 km- 250 km ayrılmış). Projemiz, yer yüzeyinden, belli
bir bölgede olan veya olması beklenen yıldırım aktivitelerinin yer ve zaman tespiti üzerine
kurulmuştur.Elde ettiğimiz bu verileri anlık olarak işleyerek bilgisayar sistemler için
anlamlı sayısal verilere dönüştürülmesi ve bu verilerin internet üzerinden yıldırım
olaylarının anlık yayılımı ile ilgili veri yayını yapan blitzortung.org sitesinden yayını
üzerine kurulmuştur.
Bu işlemleri yapmak için ferrit çubuk anten, VLF amplifikatör, kontrol paneli, GPS ve
kişisel bilgisayarımızı kullandık.
Yıldırım dedektörümüzde ferrit çubuk anten ile yıldırımlar boşalmadan önce yaydıkları
elektromanyetik dalgaları(EMD) aldık. Daha bu EMD’yi sayısal olarak işleyebilmek için
önce VLF amplifikatör ile yeteri kadar yükselttik. Yükselttiğimiz işareti CAT5 Network
kablo ile kontrol panelimize ilettik. Kontrol panelimizde bu işareti sayısal olarak işleyerek
1
FT232R ile kişisel bilgisayarımıza iletiyoruz. Son olarak bilgisayarımıza kurduğumuz
program ile internette yayımlanmak üzere internete upload ediyoruz. Burada GPS bizim
bulunduğumuz konumu belirliyor. Yani elde ettiğimiz veriler internette gösterileceği
zaman GPS ile elde edilen konum verileri sayesinde harita da ki yeri gösteriliyor. Bu
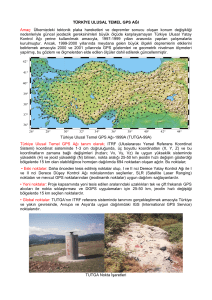
anlattığımız bilgileri bir diyagram olarak Şekil 1’de ki gibidir.
Anten
VLF Yükselteci
Kontrol Devresi
GPS Bölümü
ADC Bölümü
Bilgisayar
Verilerin izlenmesi
Yer tespiti için verilerin
yorumlanması*
Verilerin bir data merkezine aktarılması*
Şekil 1. Yıldırım dedektörü çalışma diyagramı
Yıldırım dedektörümüzde kullandığımız VLF amplifikatörü devremizde antenden elde
ettiğimiz işaretleri kullanabilmek için yeteri kadar yükseltmek için OP-AMP lar, kazanç
elemanları, dirençler, kapasitörler, endüktanslar ve diğer devrelerle iletişim kurmak için
bazı aparatlar kullandık.
Projemizin en önemli kısmı olan kontrol panelinde direnç, endüktans, kapasite, OPAMP ların yanı sıra işlemci ve FT232R gibi önemli elemanlar kullandık.
2
Yer tespiti için EM-406A serisi GPS kullandık. Bu elemanlar ile ilgili daha geniş
bilgileri ilerleyen bölümlerde verdik.
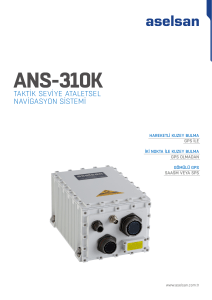
Projemizi bir blok olarak Şekil 2’de ki gibi gösterebiliriz.
Kontrol Paneli
VLF
Amplifikatör
Anten
GPS
PC
Şekil 2. Yıldırım dedektörü blok diyagramı
1.3.Yöntem
Projemizin aşamalarını belirtecek olursak;
1- Yıldırım nedir
2- Elektromanyetik dalga olarak yıldırım
3- Yıldırım dedektörünün tarihçesi
4- Yıldırım olaylarının ve havaya yaydıkları etkilerin araştırılması
5- Yıldırım dedektörünün ana parçalarının tespiti
6- Ana parçalar teorik ve yapımı hakkında bilgiler
7- Bu olayların ve etkilerin tespit edilebileceği ölçüm düzeneklerin oluşturulması
8- Yıldırımlamanın konumu için çalışmaların yapılması
9- Bu düzeneklerden elde edilecek verilerin sayısal olarak işlenmesi
10-Sayısal olarak işlenen bilgilerin yayınlanması, bir harita üzerinde anlık olarak
aktarılmasıdır.
Yıldırım dedektörümüzü tasarlarken yukarıda sıraladığımız adımları takip ettik.
3
1.4.Çalışma Takvimi
Projemizi yaparken belirlediğimiz bir yol haritası ile düzenli ve disiplinli bir süreç
uyguladık. Bu süreç aşağıda ki Çizelge 1’de verilmiştir.
Çizelge 1: Proje Çalışma Takvimi
AY
ŞUBAT 2012
MART 2012
x
x
NİSAN 2012
MAYIS 2012
YAPILAN
Proje Hakkında
Bilgi Araştırma
Projenin Teorik
x
Tasarımı
Malzemelerin
Seçilmesi
x
x
ve
Temin Edilmesi
Donanım
x
x
Olarak
Tasarımı
Projenin
Son
Kontrolleri
x
ve
Test Aşaması
Tez Yazımı
x
4
2.Teorik Altyapı
2.1.Yıldırım
2.1.1. Yıldırım Olayı
İlk olarak projemizin temeli olan yıldırım hakkında bilgiler edindik. Yıldırımın
nasıl meydana geldiği hala bir tartışma konusudur. Bilim adamları atmosferik
tedirginliklerden(rüzgar,nem,sürtünme,atmosferik basınç), güneş rüzgârının etkisi ve yüklü
güneş parçacıklarının birikimine kadar birçok konuyu incelediler. Bir
bulutun
içindeki
buzun yıldırımın oluşmasında önemli bir unsur olduğu düşünülmektedir ve bulutun
içindeki pozitif ve negatif yüklerin zorla ayrışmasına neden olabilir ve böylece yıldırım
oluşumuna yardımcı olur. Elektrik akımının havada akışı olmadığından,yıldırımın
elektrikle ilgili olması çok belirgin değildir. Yıldırım Dünya atmosferinde birbirinden zıt
yüklenmiş iki geniş, yüklü yüzeyin arasında bir biri arasındaki yük farklılıkları nedeniyle
oluşturduğu son derece yüksek akımın aniden kilometrelere ulaşan akım yollarıyla
boşalmasıdır.
Bir yıldırım boşalımı geniş bir frekans bölgesinde radyo dalgaları yaymaktadır. En
güçlü yayılımlar VLF frekans bölgesinde oluşmaktadır. VLF, (Very low frequency- Çok
düşük Frekans) bölgesi 3 kHz'den 30 kHz 'e tekabül eden radyo frekans bölgesi aralığını
tanımlamaktadır. Düşük freakansların önemli bir avantajı, yüksek frekansların aksine bu
frekansdaki dalgalar iyonosferden yeryüzene varıncaya kadar binlerce kilometrelerde
yansıyabilirler.
Genel olarak ışıma atımı olayı, çok kısa sürede iki zıt yüklenen bulut arasında
(şimşek) veya yer ile bulut arasındaki (yıldırım) yük boşalımıdır. Bu olayda akan akım,
akım yönüne paralel bir elektrik alanı oluşturmaktadır, elektrik alana dik manyetik alan da
bulunmaktadır.
Yıldırım olayı iki polaritede, negatif ve pozitif polaritede meydana gelmektedir.
Ortalama bir yıldırım atımı 20 kA ‘lik bir akım taşır, 15 C ‘lük bir elektrik yükü ve 500
mega-joule’lük bir enerji transferi oluşturur. Daha büyük yıldırım atımlarında 120 kA ‘lik
ve 350 C ‘luk değerlere ulaşıldığı görülmüştür. Bir atımın pozitif polaritesi negatif
polaritesinden yaklaşık 10 kat daha büyük akım taşımaktadır.
İki polaritede oluşan gerilim, atımın büyüklüğü ile doğru orantılıdır. Bununla birlikte
ortalama 1 megavolt/metre elektrik gradyanında oluşan ilk başlangıç atımı iletkenlik
kaybından ötürü meydana gelmez. İlk atım için gerekecek ortamdaki elektrik alan,
iletkenlik yitimi değerinden az ve bir kaç 10-2 düzeyinde olmaktadır. Gradyanın gerilimi
5
iyi geliştirilmiş gerilim boşalım kanalı için 100 V 'lar mertebesinde, aşırı kanal
yüklenmesinden dolayı, 1 kA'ler düzeyindeki geri boşalma akımı ile 1 megawatt/metrelik
bir güç çıkışı ile sonuçlanmakta . Ortalama tepe gücü çıkışı tek bir ışıma-atımı için
yaklaşık bir terawatt (1012 W) ve atımın süresi ise 30 mikro saniyeler düzeyindedir.
Yıldırım esasen havaya aktardığı bu son derece yüksek güç çıkışı ile havanın ısısını
arttırır. Yıldırım atımı ile birlikte yıldırımın oluştuğu çevrede hava son derece hızlı bir
biçimde yaklaşık 20,000 °C 'lere kadar ısınmaktadır. Bu son derece yüksek sıcaklık değeri,
güneş yüzeyinin ısından 3 kat daha büyüktür.
Ani sıcaklık yükselmesi ve bununla
başlayan sıcaklığın havada yayılımı bir süpersonik şok dalgasının havada oluşmasını
sağlamaktadır. Bu şok dalgası daha sonra ses dalgasına sönümlenmekte, bu da yıldırım ve
benzeri
hava
olaylarından
sonra
duyduğumuz
gök-gürültüsünün
kaynağını
oluşturmaktadır.[1]
2.1.2. Yıldırım Sinyalleri
3 Khz ve 30 Khz frekans aralığındaki dalgalar 10 km ve 100 km aralığında bir
uzunluğa sahiptir. Bu frekanslar için uygun anten dalga boyu boyutu 1/10000 den az bir
küçük döngü antenidir. Fakat biz projemizde daha uygun ve daha az yer kaplayan ferrit
çubuk anteni tercih ettik. Küçük döngüler ayrıca manyetik döngü olarak da adlandırılır
çünkü elektromanyetik dalgaların manyetik bileşenine daha duyarlılardır ve düzgün
korunduklarında yakın elektrik alanı seslerine daha az duyarlılardır.
Yıldırım deşarjlarının elektromanyetik sinyalleri sabit bir frekansın dalgaları
değildir. Sinyaller bir darbenin daha az veya daha çok olan haline sahiptirler ve bu
dalgaları geniş bir frekans aralığı üzerinden yayar. Her bir darbe benzersizdir ve farklı
görünümdedir. Bir yıldırım boşalmasının varış zamanını hesaplamak için ayarlı bir sisteme
değil geniş bir bant alıcı sistemine ihtiyacımız vardır. Elekromanyetik alan değişikliğinden
kaynaklanan Yüksek gerilim elde etmek için anten büyük olmalıdır. Fakat çubuk ferrit
anten küçük olmasına rağmen bunları sağlayabilmektedir.
Antenin rezonans frekansı yaklaşık olarak 1000 khz(1Mhz) ‘dir. Kullanılan
ampflikatör 1000Khz frekansı 72 Db(4000 kere) azaltır. Ayarlı anten frekansı yaklaşık 10
khz’dir.Yıldırım darbeleri genellikle 10 khzden fazla enerji içerir.
6
2.1.3. Yıldırım Dedektörünün Tarihi
Yıldırım dedektörünün tarihini inceleyecek olursak bu konuda ilk örneklerden biri
Benjamin Franklin'in yağmurlu ve yıldırımlı bir günde yaptığı deneylerde, uçan bir
uçurtma ve uçurtmanın bağlı olduğu telin sonundaki bir iletkenle şimşek ve yıldırımın
elektriksel bir olay olduğunu ortaya koymasıyla başlamaktadır. Daha sonra Franklin bir
fırtına öncesi tahmin mekanizması olarak, bir dedektör geliştirmiştir. Kendi evinde
kurduğu bu alet, elektrostatik prensiplerlerden yararlanarak çalışan basit bir elektrik
çanıdır. Uyarı amacıyla kullanılmıştır.[2]
Yıldırım ve şimşek boşalımları geniş kapsamlı bir elektromanyetik radyasyon
yayılımı oluştururlar. Bu yayılım radyo-frekans darbeleri de içermektedir. Bu dalgalardan
yayılan darbeler gözetleyici alıcılara ulaştığı zaman atım-boşalmasının yeri ve kaynağı
tespit edilmektedir. Amerika Birleşik Devletlerinde yıldırım ve şimşek gözlemleme için
ulusal bir yer ağı sistemi kurulmuştur. Bu sistem eş-zamanlı tüm Birleşik devletler
toprakları üzerindeki şimşek ve yıldırım faaliyetlerini gözlemlemektedir.
Yer-tabanlı yıldırım dedektörlerinin yanında, başlıca bir kaç uydu da bu konuda
görev yapmakta, yıldırım ve şimşek dağılımlarını gözlemlemek için görevlendirilmişlerdir.
Bu uydulardan Optik Geçici Detektör (OTD) içeren OrbView-1 uydusu 1995'te görevine
başlamıştır. 1997'de bu amaçla uzaya gönderilen TRMM uydusu ise Yıldırım Görüntüleme
Sensör'lüdür (LIS).
2.1.4.Yıldırımın Yer Tespiti
Projenin ana amacı yıldırımlama olaylarının yer tespitidir. Yer tespiti için en
önemli, doğruluğu artıran etken birden fazla istasyon bulunmasıdır. Tek istasyonla
yapılabilecek yer tespiti çok büyük hatalarla saptamalar yapılacaktır. Doğru bir veri elde
etmek için hesaplanan belli uzaklıklara kurulacak istasyonlar arası verilerin karşılaştırması,
istasyonlarca saptanan yıldırımlama olayının dünya üzerinde hangi alanda olduğu
konusunda daha kesin bilgiler verecektir.
Proje için bir yer belirleme sistemi belirlemek için çalışmalar yapılmıştır.
Araştırmalarda hiperbolik eğriler üzerine kurulan bir sistemle yapılan çalışmaların sistem
için uygun olacağı düşünülmüştür. Bu sistemde hiperbolik eğriler kullanılarak, her
istasyondan alınan verilerin oluşturduğu hiperbolik eğrinin kesişim noktası yıldırımlama
7
olayının gerçek yeri ve gerçek zamanı hakkında bilgi vermektedr. Data merkezince Alınan
her sinyal bir zaman zaman damgası alımaktadır. tA(s) ‘ya A istasyonundan alınan sinyalin
zaman damgası dersek, B istasyonundan alınan sinyalin zaman damgası tB(S) olur. Zaman
dalgaları GPS tarafından oluşturulduğu için UTC (Coordinated Universal Time Eşgüdümlü Evrensel Zaman) ile eşdeğerlidir. Bu iki farklı istasyonda alınan aynı sinyal
için iki farklı zaman damgası ve istasyonların yerleri bir hiperbolik eğri tanımlamaktadır.
dA(p) ışımanın olduğu bir p noktasının A istasyonuna metre cinsinden uzaklığı olsun.
dB(p) ise p noktasının B istasyonuna metre cinsinden uzaklığıdır. Bu durumda bu iki
uzaklık arasındaki fark “dA(p) – dB(p)” aradaki zaman damgalarının farkının, sinyalin hızı
olan ışık hızıyla çarpımına eşittir. Bu durumda aradaki eşitlik aşağıdaki gibi olur.
dA(p)-dB(p)=(tA(s)-tB(s))*300
(1)
Sinyal kaynağı bu hiperbolik eğri üzerinde bir yerde olmalıdır. İki, üç veya daha
fazla alıcı kaynağının eğrilerinin kesişim noktası tam olarak sinyal kaynağının yerini
belirlemektedir.
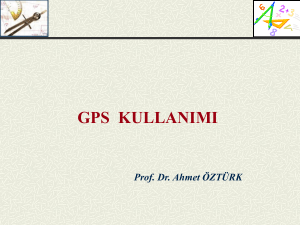
3 adet alıcı kaynak yer belirlemesi için yeterli sonuç vermektedir. Aşağıda Şekil
3’de görülen yaklaşım yer belirleme sisteminde kullanılması için önerilebilir.
Şekil 3.Dört alıcılı bir sistemin oluşturduğu 3 hiperbolik eğrinin kesim noktası yıldırım
kaynağını verdiğini gösteren şekil
8
Şekil 3’de ki 3 hiperbolik eğri 3 farklı zaman farkından tanımlı olarak tC(s)- tA(s),
tD(s)- tB(s) ve tA(s) olarak 4 alıcından (A,B,C,D) verilerle belirlenmiştir. Bu 3 eğrinin
kesişim noktası radyo sinyalinin kaynağını tanımlamaktadır. Eğrilerin genişlikleri 5µs’lik
bir toleransa sahip olabilir.
Bu eğrilerin kapsamının genişlemesine ve azalmasına
böylelikle kesişim noktasının da gerçek bölgeden uzaklaşmasına sebep olabilir.
(tA(s)-tB(s))*300-5≤dA(p)-dB(p)≤(tA(s)-tB(s))*300+5
(2)
Fakat burada temel olarak bir sorun vardır. Zamandaki 100 mikro saniyelik bir
kayma, yer farkı olarak yaklaşık 30 kilometrelik bir kaymaya tekabül etmektedir. Bu, eğer
A alıcısı sinyali B’den 100 mikro saniye daha erken alırsa A ‘ya yakın 30 km’lik bir alan
hiperbolik eğrinin içinde olmalıdır. Eğer zaman damgasının doğruluğunun ±1µs ve bir kare
oluşturacak şekilde konumlandırılmış 4 istasyon bulunduğunu ve sinyal kaynağının da bu
karenin tam ortasında yer aldığını farz edersek sinyal kaynağının gerçek konumu ile
hesaplanan konumu arasındaki sapma
olmaktadır.
Zamanlama ile yer belirleme ile ilgili temel sorunlardan biri de uzun mesafeler kateden sinyallerin güzergâhlarının sabit olmaması çevresel faktörle değişimidir.
2.2.Ferrit Çubuk Anten
Yıldırım dedektörümüzde ferrit çubuk anten kullanarak istediğimiz yıldırım
EMD’lerini alabiliriz. Bu anteni kullanmakta ki başlıca amacımız boyut olarak oldukça
küçük fakat istediğimiz işaretleri oldukça iyi algılayabilmesidir.
Ferrit çubuk antenler RF anten yapımlarında kullanılan transistörlü yayın alıcılarının
yanında uzun orta ve bazen kısa dalgaboylarında kullanılan RF antenidir. Ferrit çubuk
antenler
RFID
gibi
alanlarda
kablosuz
uygulamalarda
giderek
artan
biçimde
kullanılmaktadır. Burada gerekli anten hacimleri çok büyük olabilir.Antenlerin kompakt ve
etkili olması gerektiği yerlerde, ferrit çubuk anten ideal bir çözümdür.
Adından da anladığımız gibi ferrit çubuk antenler, demir bazlı bir manyetik
malzemeden oluşur. Bir bobin bu manyetik malzemenin etrafında sarılı durumdadır. Bu
bobinler bizim projemizde kullandığımız ferrit antende ise kemer şeklindeki plastik içinde
bulunan sargılardır. Bu sargılar ile antenin rezonansı ayarlamak için bulunan değişken
ayarlı kapasitör ile rezonans ayarlanır. Bu sargıları lehimle bir kablo üzerinde birleştirerek
9
RF ayarını oluşturmuş oluruz. Bu aslında parçaların sayısını azaltarak maliyetide
düşürmeyi sağlar.
Projemizde döngü antende kullanabiliriz. Fakat ferrit çubuk anten döngü antene
gore daha küçük olması ve daha düşük rezonans frekansına sahip olmasından dolayı ferrit
çubuk anteni tercih ettik. Bu düşük frekans bizim ölçümlerimizi yapabilmemiz için
yeterlidir. İstersek antenimizin tellerini bükerek öz rezonansını azaltabiliriz. Çünkü teller
bükerek bir kapasite oluşturmuş oluruz ve bu da öz rezonansın azalmasını sağlar.
Projemizde kullandığımız ferrit çubuk anten Şekil 4’ de gösterilmiştir.
Şekil 4. Ferrit Çubuk Anten
2.3.VLF Amplifikatör
2.3.1.Yapısı
Ferrit çubuk antenimizden gelen EMD’leri kontrol paneline göndermeden önce VLF(very
low frequency-çok küçük frekans) amplifikatörümüzde yükseltme işlemini yapıyoruz. VLF
amplifikatörümüzde kullandığımız elemanlar aşağıdaki Çizelge 2 de ki gibidir.
10
Çizelge 2: VLF Amplifikatör Malzeme Listesi[3]
Malzeme Adı
Adet
NE5534 OP-AMP
4
5mm kırmızı LED
1
1N4001 diyot
1
1MΩ direnç
2
100kΩ direnç
12
47kΩ direnç
4
10kΩ direnç
2
6.04kΩ direnç
2
2.37kΩ direnç
2
1kΩ direnç
9
82Ω direnç
4
47Ω direnç
4
330µF kapasite
3
100µF kapasite
1
100nF kapasite
13
22nF kapasite
6
100pF kapasite
8
47pF kapasite
4
330mH endüktans
3
Bizim VLF ampflikatörümüz standart operasyonel ampflikatörler tarafından
gerçekleştirilmektedir(OP-AMP). Çizelge 2’de gösterildiği gibi NE 5534 tipi OP-AMP
kulladık.Bu OP-AMP hakkında ileride daha fazla bilgi verdik.
Operasyonel ampflikatörler yüksek giriş empedansı ve düşük çıkış empedansına
sahiptir.Bir op-amp çıkışı pozitif ve negatif girişler arasındaki fark tarafından kontrol
edilir.Bir op-amp’ın maksimum kazancı 100000’dir.Kazanç negatif veya pozitif geri
besleme yoluyla kontrol edilir. Negatif geri besleme büyük ölçüde çıktı gerilim kazancının
büyüklüğünü belirlerken, pozitif geri besleme rejeneratif kazanç ve salınımı kolaylaştırır.
11
Kullanacağımız VLF amplifikatör, iki kanal tek kaynağı iki aşamalı amplifikatörü
gerçekleştirir. Basit olması için, bizim ampflikatör non-inverting zayıflama ile tek kaynak
modunda çalışmaktadır. Yaptığımız VLF Amplifikatörün fotoğrafı aşağıda Devrenin tam
şeması Şekil 5’de görülmektedir. Simetrik girdi olarak fark yükselteç devresinin iki sıcak
ucunu kullanıyoruz.
Şekil 5. VLF Amplifikatör
2.3.1.1.Filtre Seçenekleri
Ampflikatörümüz 17khz’lik veya 34 khz’lik frekanslar ile birinci dereceden aktif
low-pass(düşük geçiş) filtre kullandık.Bunun formülü :
f= 1/2ΠR1C1
(3)
İlk aşamada elimizde olanlar sırasıyla R1=47 kΩ ve C1=100 pF veya C1 = 2_100
pF. İkinci aşamada elimizde olanlar sırasıyla R1=100 kΩ ve C1=47 pF veya C1 = 2_47 pF
Her OP-AMP da, low-pass filtresi sinyal genliğini yarıdan yarıya azaltır(yaklaşık -6dB) ve
her zaman frekans 2 katına çıkar.
Filtremiz esas olarak yakınındaki ferrit anteninin kendi rezonans frekansının
sinyallerini azaltmak için kullanılmaktadır. Ferrit çubuk antenimiz kapasiteye bağlı olarak
12
self-rezonans(kendi rezonansı)frekansına sahiptir. Ferrit çubuk antenimiz için 17 khzlik
kesim frekansı kullanmaktayız.
2.3.1.2.Kazanç Seçenekleri
Ampflikatör kazancımızı gerilim bölücü ile belirliyoruz. (R1/R2) ve 1+(R1/R2) ile
bulunur. Birinci aşamamızın kazancı yaklaşık 48’dir. İkinci aşamadaki kazanç gainjumpers ile bulunabilir. Dört direnci bağlamak için 15 olası kombinasyonumuz
vardır.Kazanç her aşamada yaklaşık 1.6 artar.
Kazançlarımızı gain-jumpers ile istediğimiz gibi kendimiz ayarlayabiliriz.
2.3.1.3.Eklentiler
DC jak girişi, merkezde pozitif kutuplaşma ile güç kaynağı için kullanılabiliriz.
Ampflikatör gücünü, kontrol paneli veya tam tersi ile temin edilebiliriz. Gerilimimiz 6
voltun altına düşmemeli ve 15 voltun üstüne çıkmamalıdır.Normal operasyon 12 voltdur.
Zaten biz de devremize DC kaynak ile 12 Voltluk bir gerilim verdik. R1 seri direnç LED
güç kontrolü sağlanan voltaja ayarlanyabiliriz. 12 volt için ve standart LED 330 ve 4.7 K
arasında bir dizi direnç bizim için yeterlidir. R1 için 1KΩ’yi tercih ederiz.Eğer antenden
uzak bir yere yerleştirirsek,ayrıca anahtarlı güç kaynağı kullanabiliriz.Stereo kulaklık
bağlamak için 3.5 mm’lik jack soket kullanılabilir.Bu müdahale cihazlarını tespit etmek
için kolay ve etkili bir yol sağlar ve böylece en iyi yer bulunur.
2.3.2 NE 5534 OP-AMP
VLF Amplifikatörümüzde NE 5534 serisi OP-AMP’lardan 4 adet kullandık. Bu
OP-AMP’ları kullanmamızın en önemli nedeni hem DC hem de AC işaretlerde oldukça
yüksek performans göstermesidir. Ayrıca bu yükselteçler oldukça az gürültü özelliğine
sahiptirler. Yüksek çıkış kullanım özelliğine sahiptirler. Özelliklerini listeleyecek olursak:
-Giriş gürültü gerilimi 3.5 nV/Hz dir.
-Kazanç bantgenişliği 10MHz dir.
-Ortak mod çıkarma oranı 10 dB dir.
-Yüksek DC voltaj kazancı 100 V/mV dur.
-Yüksek çevirme oranı 13 V/µs dir.
-Geniş voltaj aralığı 3V-20V arasındadır.
-Küçük harmonic distorsiyona sahiptir.
13
-Tepeden tepeye çıkış gerilimi salınımı Vcc= ±18 V RL=600Ω dur.[4]
Şekil 6’da NE 5534 bağlantısı gösterilmiştir.
Şekil 6. NE 5534 serisi OP-AMP
2.3.3.CAT5 Network Kablo
CAT5 network kablo ile antenden aldığımız işareti VLF amplifikatöre, burada
yükseltilen işareti de CAT5 network kablo ile bir sonra ki aşama için kontrol paneline
göndermeye yaramaktadır.
CAT5 network kablo UTP kablo çeşitlerinden biridir. UTP kablolar daha çok
bilgisayarlarda kullanılan veri transferini sağlayan kablolardır. Yapısı koaksiyel kabloya
göre oldukça basit olan bir bakır kablo çeşitidir. İçerisinde 4 çift bakır kablo
bulunmaktadır. Kabloların birbirleri üzerindeki elektromanyetik etkisini azaltmak için,
bakır kablolar ikişer ikişer sarılı durumdadırlar. Çevresinin diğer kablolara oranla daha
küçük olmasından dolayı kablo kananllarında daha az yer kaplamakta ve büyük ağ
kurulumlarında çok avantaj sağlamaktadır.
UTP kablolar, STP kablonun tam tersine çevredeki gürültüden etkilenmektedir.
Daha önceden daha yavaş bilgi iletimi yapabilirken yeni geliştirilen teknolojilerle UTP
kablo üzerinden Gigabit hızlı iletişim sağlanabilmektedir. Bu da UTP kablonun daha
yaygın kullanımını beraberinde getirmiştir.
14
CAT5 network kablo günümüzde en çok kullanılan UTP kablo türüdür. 100 MHz
lik bir frekans geçişine elverişlidir. Saniyede 100 Mbit lik veri taşır. 1000 BASE-T gigabit
ethernet sistemlerinde tercih edilir. 90 m üzerinde kullanılması tavsiye edilmez. Yerel ağ
bağlantıları için kullanılır. Günümüzde neredeyse tüm yerel ağ bağlantıları Kategori 5 UTP
kablolarıyla yapılmaktadır. 100 metrelik mesafe aşılmadığı müddetçe 100 Mbps’lik veri
aktarım kapasitesine sahiptir. Bu nedenle 100 Mbps hızını destekleyen Ethernet kartı ile
çalışabilecek en uyumlu kablodur. [5]
Projemizde kullandığımız CAT5 network kablo aşağıda Şekil 7’de gösterilmiştir.
Şekil 7. CAT5 Network Kablo
15
2.4. Kontrol Paneli
Kontrol devresi projede kullanılan ferrit çubuk antenden belli kapsama alanından
alınan sinyalleri yükseltilip ulaştığı bilgisayar üzerine aktarılmak üzere sayısal verilere
çevrildiği aşamadır. Bu aşamada ayrıca sinyalin konum bilgilerini de kullanmak için bir
GPS cihazından alınacak bilgi kullanılacaktır.
Kontrol devresinin tasarımı antenden alınıp ilk aşamada yükseltilen analog
sinyallerin sayısal tabana çevrilmesi üzerine kurulacaktır. Bunun için bir ya da birkaç
analogdan sayısala dönüştürücü (ADC) kullanılacaktır. Konum belirleme cihazı devre
üzerine konuşlanacaktır.
GPS alıcıdan alınacak coğrafik pozisyon, rakım gibi bilgiler geçerli anlık zaman ile
birlikte bir sonraki aşama için diğer sinyal verileri ile birlikte çıkış verisi olarak
aktarılacaktır.
Yaptığımız kontrol paneli aşağıda Şekil 8’de gösterilmiştir.
Şekil 8. Kontrol Paneli
16
Kontrol panelimiz yaparken kullandığımız malzemeler çizelge 3 de gösterilmiştir.
Çizelge 3: Kontrol paneli malzeme listesi[6]
Malzeme Adı
Adet
100 kΩ direnç
1
10 kΩ direnç
10
2 kΩ direnç
2
1 kΩ direnç
1
330 Ω direnç
2
330 µF kapasite
2
4.7 µF kapasite
2
100 nF kapasite
7
15 pF kapasite
2
1N4001 diyot
1
5mm kırmızı LED
1
5mm sarı LED
1
5mm yeşil LED
1
5mm mavi LED
1
20000MHz Kristal 1
osilatör
Voltaj regülatörü
1
karşılaştırıcı
1
ADC
2
FT232R
1
Mikroişlemci
1
17
2.4.1.Yapısı ve Çalışması
Kontrol panelinimiz 20.000000 MHz saat frekansı ile çalışan bir Atmel 8-bit AVR
ATmega644A mikroişlemcidir. Kontrol panelimiz ayrıca yüksek hız modunda çalışan iki
ayrı 8 bit’lik ADC 0820 CCN analogdan dijitale çeviricisi vardır. Bu operasyon modunda
dönüştürücüler 500 ksps= 500.000 örnek / saniye ’ye varan bir verimlilik sağlama
kapasitesine sahiptir. Giriş sinyali (+ - 0.417) Volt eşiğini aşması durumunda, bir TCL374
dörtlü dönüştürücü analogdan dijitale dönüşümü aktifleştirir.
Mikroişlemcimiz şöyle çalışır: 8’e bölünmüş saat frekansı ile çalıştırmak için bir iç
zamanlayıcı çalıştırılır ve bu GPS alıcısından, 1 PPS sinyalinin yükselen kenarı ile
tetiklenecektir. 2 tane 1 PPS sinyalinin arasındaki sayaç farkı yaklaşık olarak 2500000
ünitedir. Bir sayaç ünitesi 400 ns’ye tekabül eder. Alıcıdan gelen sinyaller eğer (+-0.417)
eşiklerine ulaşırsa, mikroişlemcimiz sinyali yakalar ve analogdan dijitale dönüşümü
başlatır. Bundan sonra,mikroişlemcimiz her AD dönüştürücüsünün 256 tane örneğini alır.
Bu
yaklaşık
olarak
500
US’lik
bir
örnekleme
süresine
tekabül
eder.
Ayrıca,mikroişlemcimiz daima GPS ‘in GPRMC ve GPGGA verilerini okur ve
zaman,coğrafi konum,rakım yani yükseklik,uydu sayısı gibi bilgileri depolar.Bu her saniye
ve her kaydedilen veri serisi için veri mesajı çıktısı verir.
Kontrol panelimiz FT232RL ile seri Breakout paneli için bir USB kullanır. Bu
sadece 5 Voltluk güç kaynağı ve seri TTL arayüzü destekler. Kontrol panelimiz EM-406A
GPS modülü ile çalıştırdık. Bu ayrıca AVR sistem içi programcısı arayüzü(ISP arayüzü)
için 6-pin başlığa sahiptir.Bu arayüz mikroişlemcimizi yeniden programlamak içinde
kullanılabiliriz.
Amplifikatör ve kontrol panelimizi bire bir CAT5 network kablo ile RJ45 jakları
üzerinden bağladık. Biz kalkanlanmış CAT 5 kabloyu tercih ettik.. Bu kablo ile ayrıca her
iki panel için aynı güç kaynağını kullanma imkanını sağlamış olduk. DC jakı merkezdeki
pozitif kutuplaşma ile ayrı bir güç kaynağı için kullanılabilir. Voltajımız 10 voltun altına
düşmemelidir ve 15 voltun üzerine de çıkmamalıdır. Normal çalışma 12 Voltdur. Bu
yüzden bizde 12 V da çalıştırdık.
18
2.4.2.Voltaj Regülatörü
Voltaj regülatörleri çeşitli nedenlerden dolayı şebeke gerilimlerinde meydana gelen
voltaj düşmelerinden veya voltaj yükselmelerinden dolayı ev, işyeri, fabrika vb. yerlerdeki
hassas cihazların zarar görmesini önlemek, daha uzun ömürlü olmalarını sağlamak ve bu
cihazların verimliğini arttırmak amacıyla üretilen elektronik voltaj dengeleyicilerdir. Bizde
yıldırım dedektörümüzün zarar görmesini engellemek için voltaj regülatörü kullanıyoruz.
Bizim devremizde kullandığımız voltaj regülatörü 7805 serisi 3 bacaklı bir
entegredir. Bu entegre sabit 5 V’luk bir gerilim almamızı sağlayacak. Regülatörümüzün en
solda ki 1. Ayağı yüksek voltaj girişidir. Ortada ki 2. Ayağı toprağa bağlanır. En sağda ki
3.ayak ise 5 V çıkışıdır.
7805 entegresi çıkışta 5 V elde etmek için oldukça iyi bir entegredir. Bu entegrenin 1.ayağı
yani girişine 7V-35V arasında gerilim uygulayabiliriz. Fakat entegremiz çok ısınarak
bozulabilir. Bu nedenle regülatörümüzün üst kısmında bulunan kısımdan bir soğutucu
takarak bunun engelledik.[7]
2.4.3.FT232R USB UART Dönüştürücüsü
Bu dönüştürücünün çıkışı ile bilgisayarımıza giriş yapıyoruz. Bu sistem asenkron
veri transferi için tek çip olarak USB transfer arayüzüdür. Tüm USB protokolü cip
üzerinde mevcuttur. Özel bir programa ihtiyaç duymadan veri transferi yapabilir.
-1024 bit EEPROM depolama aygıtı cihaz tanımlamaları ve CBUS I/O konfrigasyonu için
mevcuttur.
-USB sonlandırma dirençleri tam haliyle entegre üzerinde yerleştirilmiştir.
-Saat entegresi ile dahili kristal sayesinde ayarlanabilir saati harici MCU ya harici saat
bağlanmadan uyumlanabilir.
-Data transfer hızı RS422, RS485, RS232 de 300 Baud dan 3Mbaud a kadardır.
-128 byte alıcı buffer ve 256 byte verici buffer veri hızını yükseltir.
-Benzersiz FTDIChip-ID özelliği var.
-Verici ve alıcıların çalıştığını göstermek için LED bulundurur.
-FIFO alıcı ve verici bufferlar yüksek very akışı sağlar.
-Cihaz benzersiz USB seri numarası ile önceden programlanmış şekilde verilir.
-USB I/O için 3.3 V dönüştürücüsü vardır.
19
-Güç sürücüleri için I/O pinleri konfrigasyonu yapılmıştır.
-USB bant genişliğini tüketimi düşüktür.
- -40°C-85°C arasında çalışabilir.[8]
Yıldırım dedektörümüzde kullandığımız FT232R aşağıda Şekil 9’da ki gibidir.
Şekil 9. FT232R USB UART Dönüştürücüsü
2.4.4. ATmega644A Serisi Mikroişlemci
Yıldırım dedektörümüzde ATmega644A serisi mikroişlemci kullandık. Bu
işlemcinin özellikleri:
-Çekirde boyutu 8 bit
-6 adet PWM kanalı vardır.
-Program bellek boyutu 64 KB
-EEPROM bellek boyutu 2 KB
-RAM bellek boyutu 4 KB
-23 adet programlanabilen I/O pini vardır.
-C ve assembly dilinde programlanabilmektedir.
-Dahili ve harici osilatörü vardır.
-Yazılım güvenliği için programlama kilidi mevcuttur.
20
-İşlemci hızı 20 MHz
-Çevre birimleri ADC,RTC
-Gömülü arayüz tipi SPI, USART
-Çalıştığı voltaj aralığı 2.7 V-5.5 V
-Saat frekansı 20 MHz
-Flash bellek boyutu 64 KB
-Bit sayısı 8
-ADC bit sayısı 10
-JTAG, Serial, SPI, USART, 2-WireSPI, USART arayüzlerine sahiptir.
-Çalıştığı sıcaklık aralığı -45°C-80°C
-2 tane 8 bitlik zamanlayıcı-sayıcısı vardır.[9]
Projemizde kullandığımız ATmega644A aşağıda Şekil 10’da gösterilmiştir.
Şekil 10. Kullandığımız ATmega644A serisi mikroişlemci
21
2.4.5. DC Güç Kaynağı
Devremizin çalışması için 12 V’luk bir gerilim gereklidir. Biz bunu dışarıdan 3V4.5V-5V-6V-7.5V-9V-12V gerilim veren 7 kademeli bir adaptörden verdik. Bu enerjiyi
kontrol panelimizde ki jak ile uyguluyoruz.
VLF amplifikatör devremiz için ayrı bir güç kaynağı gerekmemektedir. CAT5
network kablo ile VLF amplifikatör ve kontrol panelimiz arasında hem data hemde enerji
iletimi olmaktadır.
2.4.6.EM-406A GPS Alıcısı
Projemizde kulladığımız EM-406A serisi bir GPS dir.Biz GPS’i yıldırımın yer
tespiti ve bulunduğumuz konumu belirlemek için kullanıyoruz. EM-406A’den bahsedecek
olursak SiRF-III yonga kümesi kullanan bir GPS modülüdür. Duyarlılığı oldukça yüksek
bir GPS’dir. (-159dBm). Modülümüzün korunması için bir kalıp bölmesine sahip
olmadığından korunmalıdır. Biz bunun için plastik bir kutu içerisine yerleştirdik.
Modülümüzü
4.5 – 6.5 volt gerilimde, aşağı yukarı 44 miliamper akımla
çalıştırılmalıdır fakat biz
modülümüzü 3.6 voltluk gerilimde sorunsuz olarak
çalıştırıyoruz. Bu gerilimi kontrol panelinden sağlamaktayız.
Bizim yıldırım konumu sistemimiz için ihtiyaç duyduğumuz GPS cihazı en az 1
mikrosaniye hassasiyet ile saniyede tek darbe
(1PPS) sinyali ve RS232 veya TTL
seviyesini kullanarak bir seri arayüz sağlamak zorundadır. EM-406A‘yı seçmemizin
nedeni bize bu özellikleri sağlamaktadır. EM-406A 1 mikrosaniye süreyle 1PPS lik çıkış
sağlamaktadır. Modülümüzde bulunan yedek pil
güç düşmesi durumunda ayarların
kaybolmaması için bütün ayarları saklar.Modül ayrıca GPS in düzeltilmesi veya
düzeltilmemesi için bir LED gösterge içerir.
Modülümüzün baud hızı 4800 bauddur. Bu noktada EM-406A ile diğer bütün GPS
ler arasında önemli bir fark vardır. Seri bağlantısı TTL sinyal seviyesini (0V/2.85V)
kullanır, RS-232 sinyal seviyesini (+3V/-3V) kullanmaz. Bu durumda bağlantı teli ayarını
TTL/RS232 bağlantısına çevirmek durumunda kalırız. EM-406A’yı seçme nedenlerimiz
aşağıda ki gibidir:
-Bu modül hala üretimde olan bir GPS’dir. Bu nedenle bulması kolay bir üründür.
-Algılaması yüksek bir GPS’dir. Kapalı bir alanda bile ölçüm yapabilir.
-TTL dönüşüm ile RS232’yi gereksiz bir duruma getiren seri TTL arayüzü vardır.
-Ayrıca ucuz bir modüldür.
22
Kullandığımız EM-406A GPS Şekil 11’de gösterilmiştir.
Şekil 11. EM-406A GPS Modülü
23
3.Sistem Tasarımı Ve Çalışması
3.1. Kontrol Paneli LED’leri
Kontrol panelimizin üzerinde bulunan 4 adet LED bizim yıldırım dedektörümüz ile
ölçüm yaparken ki rehberimiz olacak. Bu LED’lerin herbirinin ne işe yaradığı aşağıdaki
gibidir.
Kırmızı LED bizim yıldırım dedektörümüzün güç ışığıdır ve devremize enerji
verildiği süre boyunca devamlı yanar ve diğer 3 LED 4 defa birbiri ardına yanıp söner. Bu
mikroişlemcimizin çalıştığını gösterir.
Eğer mikroişlemcimiz bir GPRMC verisi fark ederse Yeşil GPS LED yanıp
sönmeye başlar. Eğer Yeşil GPS LED kapalı kalırsa, çoğu kez
GPS’in baud hızı
mikroişlemcimizin baud hızından farklılaşır. Baud hızı ile bilgileri ileride verdik.Doğru
baud hızını bulmak için kontrol panelimizin baud hızı jumper JP1 ayarını değiştirebiliriz ve
daha sonra reset düğmesine basmamız gerekir. Eğer GPS cihazı yolunda ise ve eğer
GPRMC verileri V durumu değilde A durumu içeriyorsa Yeşil GPS LED daimi olarak
yanacaktır. Bu zaten genellikle GPS cihazımızın en az 1 uydu aldığındaki durumudur. Eğer
Yeşil GPS LED yanıp söner şekilde kalırsa GPS’imizi daha yeterli bir yere; pencere veya
gökyüzünü gören bir yere taşımalıyız.
Mavi 1PPS LED sürekli yanıp söner ve GPS 1PPS sinyal sağlar. Bu her saniye
olmaktadır.. Mavi 1PPS LED yanıp sönmeye genellikle yeşil GPS LED sürekli olarak
yanmaya başladıktan sonra başlamaktadır.
Sarı SIG LED her zaman yanar ve denetleyici, sinyal bilgilerini içeren veri çıktısı
verir.
3.2.Kontrol Paneli Baud Hızı Ayarı
Yukarıda bahsettiğimiz gibi ölçüm yapabilmemiz için bazen baud hızı ayarını
elimizle ayarlayarak yapmalıyız. Kontrol panelimizin Jumper JP1’inin 2 tane fonksiyonu
vardır. Birincisi, GPS modülü tarafından kullanılan baud hızını
4800,9600,19200 ve
38400 baud, 8 bit,1 stop bit, no parity arasında değiştirme imkanı sağlar. İkinci olarak ise,
mikroişlemcimizin arayüzünün baud hızını 115200,230400,250000 ve 500000 baud,8 bit,1
stop bit,no parity arasında değiştirme imkanı sağlar.
24
GPS
daima
varsayılan
baud
hızında
çalıştırılmalıdır.Bizim
yıldırım
dedektörümüzde kullandığımız EM-406A GPS modülünün varsayılan baud hızı 4800
baud’dur.GPS’in baud hızını başka bir değere değiştirmeye gerek yoktur. GPS modülünü
yüksek bir baud hızında mesela 38400 baud hızında çalıştırmaktansa düşük bir baud
hızında yani 4800 baud hızı çalıştırmak ölçümlerimiz için çok daha iyi olacaktır. Diğer
baud hızı Jumper pozisyonları sadece farklı GPS modülleri kullanılırken uygulanır.
Bilgisayara bağlanan seri bağlantının baud hızı ,bilgisayarın ve tracker programın
desteklediği mümkün olan en yüksek değere ayarlanmalıdır. Tracker Programı hakkında
detaylı bilgileri ilerleyen kısımlarda verdik.Baud hızını değiştirmek için şöyle yapmalıyız.
Panelimizin gücünü kapatırız,USB kablosunu bilgisayardan sökeriz, panelde sağ Jumperı
ayarlarız, panelin gücünü tekrar açarız, paneli bilgisayara tekrar bağlarız. Tracker
programını çalıştırır, ve tracker programımız ile yeni bir baud hızını seçeriz. Windows
işletim sistemileri için tracker program 115200 baud hızından başka baud hızını
desteklememektedir.
Jumper JP2, seri bağlantıya ikinci bir yol olarak kullanılabilir.Normal operasyon
olarak çalıştırmak için mikroişlemcimizin girişi ile GPS cihazının çıkışını bağlarız. Diğer
bir yol ise mikroişlemcimizi seri akışından ayırır, bu GPS cihazının çıkışı ile panelin
çıkışını bağlarız.Bu işlem, panelin seri arayüzünde GPS cihazının çıkışını izlememizi
sağlar.
3.3.Veri Yükleme
Önceden de bahsettiğimiz gibi elde ettiğimiz verileri internet üzerinde göstermek
için internete veri yükleme yapıyoruz. Bu işlemi yapmak için Tracker(izleyici) bir program
sayesinde gerçekleştiriyoruz. Bu bölümde bu veri yükleme işlemini nasıl yaptığımız
hakkında bilgi verdik.
İlk olarak, GPS cihazımızı kontrol paneline bağlıyoruz ve kontrol panelini de
bilgisayarımıza bağlıyoruz. Ampflikatörümüzü ile kontrol
panelinin bağlantısını
söküyoruz. Kontrol panelimizin Jumper ayarını GPS için 4800 baud’a ayarlıyoruz. Çünkü
bizim EM-406A modülümüz sadece bu baud hızını desteklemektedir. Bilgisayara seri
bağlantı için ise 115200 baud‘a ayarlıyoruz. Sonra kontrol panelinimize enerji veriyoruz ve
Tracker programını çalıştırıyoruz. Yukarıda söylediğmiz gibi programdan da seri cihaz,
25
baud hızı ve GPS tipini seçip ve GPS’imizi çalıştırıyoruz. Yeşil LED’imiz yanıp sönmeye
başlar ve bir süre sonra sürekli yanmaya başlıyor. Bu bize verimizin alındığını gösteriyor.
Bazen bu yeşil LED yanmayabiliyor. Böyle olduğu aman baud hızlarını değiştirmemiz
gerekir. Fakat bizim baud hızımı sürekli 4800 ve 115200 olduğu böyle bir sorun olmuyor.
Son olarak aldığımız kullanıcı adı ve şifremizi kullanara sisteme giriş yapıyor ve
verilerimiz göndermiş oluyoruz.
26
4.Sonuçlar
Yıldırım
dedektörümüz
ile
Trabzon
şehrinin
yıldırım
aktivitelerini
izleyebilmekteyiz. Yaptığımız testler sonucunda yıldırım aktivitelerinin verilerini elde
ederek proje başarı ile sonuçlandırılmıştır. Özellikle Trabzon gibi bir liman kenti için bu
proje oldukça gereklidir. Bu proje ile Trabzon daki küçük balıkçılar, oldukça tehlikeli olan
denize düşen yıldırımlardan önceden haberdar olarak can ve mal kayıplarını düşürebilirler.
Projemizi çok daha verimli bir hale getirebilirdik. Fakat bunun için bulunduğumuz
konumdan 50 km doğu ve 50 km batıya birer tane daha istasyon kurmak gerekli. Bizim
bunu yapmamız oldukça masraflı ve bu istasyonları kontrol etmemiz çok zor olduğu için
bir tane istasyon kurduk ve elde ettiğimiz verileri internete yükleyerek diğer kullanıcıların
verileri ile karşılaştırarak yıldırım yer tespiti yaptık. Kurduğumuz istasyon ile istediğimiz
verileri elde edebildiğimiz şuan için başka istasyonlar kurmaya gerek yoktur.
Bu projeyi Trabzon şehrinde duyurup genişleterek yeni gönüllü istasyon kurucuları
ile bu eksikliği kapatıp tamamen bağımsız bir duruma gelebiliriz. Umarız bu proje bunun
için bir ön ayak olur.
Projemiz üzerinde yaptığımız ölçüm testleri sonunda aşağıdaki sonuçları elde ettik:
-Anten ile yıldırım sinyalleri elde edildi.
-VLF amplifikatör ile yıldırım sinyali yeteri kadar yükseltildi.
-Kontrol paneli ile veriler işlenebilmek için sayısal forma dönüştürüldü.
-GPS ile konum ve yer tesbiti yapıldı.
-Yayınlanmak üzere başarı ile internete very yükleme yapıldı.
27
KAYNAKLAR
[1]. (2012) Blitzortung web sayfası[Online].
http://www.blitzortung.org/Webpages/index.php?lang=en&page=2
[2]. (2012) Blitzortung web sayfası[Online].
http://www.blitzortung.org/Webpages/index.php?lang=en&page=2
[3]. (2012) Blitzortung web sayfası[Online].
http://www.blitzortung.org/Webpages/index.php?lang=en&page=2
[4]. “NE 5534 data sheet” (2004) Dallas, Texas,USA
[5]. Wikipedia websitesi [Online]. en.wikipedia.org
[6]. (2012) Blitzortung web sayfası[Online].
http://www.blitzortung.org/Webpages/index.php?lang=en&page=2
[7]. Voltajregülatörü websitesi [Online]. www.voltajregulatoru.com
[8]. “FT232R USB UART data sheet” (2010) Future Technology Devices International
Limited, ShangHai, China
[9]. “ATmega644A data sheet”(2011) Munich, Germany
28
EK-1 Standart ve Kısıtlar Formu
Karadeniz Teknik Üniversitesi
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
Standart ve Kısıtlar Formu
Bitirme Projesinin hazırlanmasında Standart ve Kısıtlarla ilgili olarak, aşağıdaki soruları
cevaplayınız.
1. Projenizin tasarım boyutu nedir? Açıklayınız.
Projemiz lisans düzeyinde yapılabilecek düzeyde bir projedir.
2. Projenizde bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Projemizi kendimiz belirleyip, çözüme ulaşması gereken adımları kendimiz sırasıyla yerine
getirerek çözüme ulaştırdık.
3. Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız?
Lisans eğitimimiz süresince almış olduğumuz bilakis antenler, mikrodalga tekniği ve
elektromanyetik alanlar derslerindeki bilgilerimiz projeye katkı sağlamıştır.
4. Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
IEC 60096: RF kabloları için standartlar,
IEC 61508 : Programlanabilir cihazların güvenliği ile ilgili ,
IEC 60559 : Mikro denetleyiciler ile ilgili standartlar
5. Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir?
Ekonomik: Daha fazla istasyon kurularak tamamen bağımsız olabilirdik fakat bu
masraflı olurdu.
Çevre sorunları: Projemizin çalışması için kapalı bir mekan değil açık bir mekanda
bulunmak çok daha verimli sonuçlar almamızı sağlar.
Güvenlik: Yıldırım ölçümleri yapıldığı için ne olursa olsun çok az bir risk vardır.
Sağlık:Kullanılan malzemelerin insan sağlına zarar vermemesine özen gösterilmiştir.
Projenin Adı
Projedeki
adları
Yıldırım Dedektörü
Öğrencilerin Burkay Taşcı-Samet Soğuksulu
Tarih ve İmzalar
25.05.2012
29
ÖZGEÇMİŞ
BURKAY TAŞCI
4 Ekim 1989 yılında Malatya’da doğdum. İlköğretimimi Fırat İlköğretim okulunda
tamamladım. 2003 yılında kazandığım Turgut Özel Anadolu Lisesini 2007 yılında
tamamladım. Okul hayatımı Karadeniz Teknik Üniversitesi Elektrik-Elektrik Mühendisliği
bölümünde sürdürmekteyim.
SAMET SOĞUKSULU
01.07.1989 yılında Trabzonda doğdum. İlköğretimimi yavuz selım ılkogretım okulunda
tamamladım. Liseyi Araklı Anadolu Öğretmen lisesinde okudum. Şuan Karadeniz Teknik
Üniversitesi Elektrik- Elektronik mühendisliğinde eğitimime devam etmekteyim. 2010
yılında Amerika Birleşik Devletlerinde work and travel programına katıldım. Tomahawk
lake Waterpark da cankurtaranlık yaptım. Ayrıca şuan Türkiye Futbol Federasyonunda
lisanslı futbol hakemliği yapmaktayım.
30