1. ANALOG MOS TÜMDEVRE TEKNøöø
1.1. Giriú, Analog tümdevrelerde MOS teknolojisinin yeri
Son zamanlara kadar daha çok dijital sistemlerin gerçekleútirilmesinde
kullanılan MOS teknolojisi, günümüzde, analog tümdevre yapı bloklarının
oluúturulmasında gittikçe yaygınlaúarak kullanılmakta, literatürde sürekli olarak
bu alanda yapılan yeni çalıúmaları ve geliútirilen yeni devre bloklarını yansıtan
yazılarla karúılaúılmaktadır. Bunun baúlıca nedeni, gün geçtikçe analog ve dijital
sistemlerin içiçe girmesidir. Dijital sistemlerde MOS teknolojisi yaygın olarak
kullanıldı÷ından, analog sistemler için de aynı teknolojinin kullanılabilir olması,
ekonomik açıdan büyük yararlar sa÷lamaktadır. Ço÷unlukla, iúaretin analogdan
dijitale çevrilmesi yahut bunun tersinin gerçekleútirilmesi için gerekli olan
presizyonlu kuvvetlendirme, süzme, örnekleme ve tutma, gerilim karúılaútırma,
presizyonlu ikili kod a÷ırlıklı gerilim ve akım üretme vb. analog fonksiyonların
gerçekleútirilmesine gereksinme duyulmaktadır. Alt sistemlerin eski teknolojide
oldu÷u gibi, ayrı ayrı bipolar analog ve MOS dijital bölümlere ayrılması ise,
birçok durumda kılıflama maliyeti, baskılı devre üzerinde kaplanan yer gibi
nedenlerle, istenen bir özellik olmamaktadır. Bunun yanısıra, MOS teknolojisi
ile bipolar tranzistorlara göre %30-%50 oranında daha az kırmık alanı
kullanılmaktadır.
Bipolar teknolojisi ile karúılaútırıldı÷ında, MOS teknolojisinin analog
fonksiyonların gerçekleútirilmesi açısından yararlı yanları oldu÷u kadar yetmez
kalan özellikleri bulundu÷u söylenebilir. MOS teknolojisinin bipolar
tranzistorlara göre önemli sayılabilecek sakıncaları úöyle özetlenebilir :
1. Aynı kolektör akımı için bipolar tranzistorların gm geçiú iletkenli÷i MOS
tranzistorlara göre kıyaslanamayacak kadar yüksektir.
2. Geçiú iletkenli÷inden ileri gelen bu sakıncayı gidermek üzere, kazanç
katlarında büyük de÷erli dirençler kullanılabilir. Ancak, MOS teknolojisi ile
büyük de÷erli dirençler elde etmek oldukça güçtür. Bu dirençleri elde etmek
için kullanılan kırmık alanı da o kadar fazla olmaya baúlar ki, bunların
kullanılması pratik olmaktan çıkar. Bu yüzden, MOS’ larla çalıúılırken büyük
kazanç de÷erleri elde etmek üzere aktif elemanlardan yararlanma zorunlulu÷u
bulunmaktadır.
3. MOS tranzistorların frekans cevabı bipolar tranzistorlarınkine göre daha
kötüdür.
1.2
4. ømalat sırasında meydana gelen eúleútirme sorunu yüzünden, iúlemsel
kuvvetlendiricilerin giriú dengesizlik gerilimi daha fazladır.
5. 1/f gürültüsü daha yüksek olmaktadır.
Bütün bu sakıncalara ra÷men, günümüzde MOS teknolojisi analog
devrelerde gittikçe yaygınlaúmaktadır. Bunun nedeni, daha önce de belirtildi÷i
gibi, analog ve dijital sistemlerin gün geçtikçe içiçe girmesidir.
Dijital sistemlerde MOS teknolojisinin kullanılması, analog sistemlerde
de aynı teknolojinin kullanılabilir olması, ekonomik açıdan büyük yararlar
sa÷lamaktadır. Bunun yanısıra, yüksek giriú direnci, çekilen akımın düúük
olması gibi nedenlerden ötürü, MOS yapılar yarar sa÷lamaktadır.
1.2. MOS tranzistoru karakterize eden temel ba÷ıntılar
Analog tümdevrelerin analizinde kullanılacak temel ba÷ıntılara kısaca
de÷inmekte yarar vardır. MOS tranzistorun elektriksel özellikleri aúa÷ıdaki
ba÷ıntılarla verilmektedir:
Doymalı bölgede VGS -VT d VDS için
ID
1W
2
P . COX >VGS VT @ >1 O.VDS @
2 L
(1.1)
Doymasız bölgede VGS -VT t VDS için
ID
1W
P . COX > 2.(VGS VT ).VDS VDS 2 @>1 O.VDS @
2 L
(1.2)
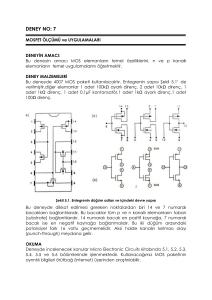
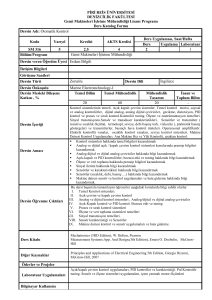
Bu ba÷ıntılarda yer alan O büyüklü÷ü, kanal boyu modülasyonu parametresi
olarak isimlendirilir. O büyüklü÷ü, BJT’deki Early olayını modelleyen Early
gerilimine benzer biçimde tanımlanan bir büyüklüktür. Bu açıdan bakıldı÷ında,
MOS tranzistor için bir Early gerilimi tanımlanması halinde kanal boyu
modülasyonu parametresinin O=1/VA biçiminde ifade edilebilece÷i açıktır. Bu
parametrenin geometrik tanımı ùekil-1.1’ de görülmektedir .
1.3
ùekil-1.1. Bir NMOS tranzistorun çıkıú öze÷rileri üzerinde O kanal boyu modülasyonu
parametresinin geometrik tanımı.
Gövde-Etkisi
MOS tranzistorlarda etkili olan di÷er bir özellik de gövde etkisidir. Bir
NMOS da kaynak ile savak arasındaki n tipi kanal ile p tipi katkılı gövde bir pn
jonksiyonu gibi düúünülebilir. Kaynak-gövde ve savak-gövde jonksiyonlarından
hiçbirinin iletim yönünde kutuplanmaması için, gövde ucu en düúük potansiyele
ba÷lanmalıdır. Dolayısıyla, kanal ve gövde arasındaki jonksiyon tıkama yönünde
kutuplanmıú olur. Tıkama yönünde kutuplanmıú bir jonksiyonun iki yanında
oluúan fakirleúmiú bölge artan tıkama yönü gerilimiyle geniúler. Buna göre, sabit
geçit gerilimi altında akan ID akımı, gövde potansiyelinin de÷iútirilmesiyle
kontrol edilebilir. Bu olay, JFET lerde savak akımının geçit gerilimiyle kontrol
edilmesine benzemekle birlikte, MOS tranzistorlar için istenmeyen bir
durumdur. Zira, gövde etkisi ID akımını azaltacak yönde etki etmektedir.
Akımdaki bu azalmayı dengelemek üzere, geçit gerilimini arttırmak gerekir. Bu
açıdan bakıldı÷ında, gövde etkisinin VT eúik gerilimini arttırdı÷ı söylenebilir.
Eúik gerilimindeki bu artma, VSB kaynak-gövde gerilimi ve C de de÷eri 0.5 ile 2
arasında de÷iúen, gövde katkılama oranına ba÷lı bir sabit olmak üzere
'VT
C VSB
ba÷ıntısı ile verilmektedir.
(1.3)
1.4
Gövde etkisinin MOS tranzistorun eúik gerilimine etkisi
VT
>
VT 0 J VBS 2IF 2IF
@
(1.4)
ba÷ıntısıyla verilir. Bu ba÷ıntıda J büyüklü÷ü gövde etkisi faktörü, VT0
büyüklü÷ü VBS = 0 ikenki eúik gerilimi, IF de Fermi potansiyelidir.
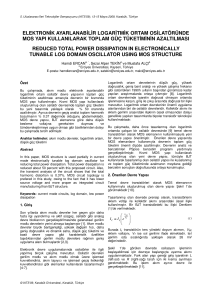
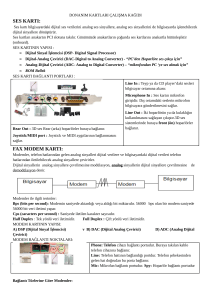
MOS küçük iúaret modeli
ùekil-1.2. MOS tranzistorun küçük iúaret modeli
MOS tranzistorun küçük iúaret modeli ùekil-1.2’de görülmektedir.
Analog uygulamalarda MOS tranzistorlar hemen hemen sadece doyma
kullanıldıklarından, verilen model doyma bölgesi için geçerlidir. Modeldeki gm
geçiú iletkenli÷i (1.1) ba÷ıntısından türev alınarak bulunabilir. Böylece
gm
P . COX
W
V VT L GS
(1.5)
yahut
gm
2 P . COX
W
I
L D
(1.6)
gm
2I D
VGS VT
(1.7)
olur. Bu ba÷ıntılardan yararlanılarak MOS ile bipolar tranzistorlar
karúılaútırılabilir. Bipolar tranzistorlarda kolektör akımı belli olduktan sonra
gm
IC
(1.8)
§¨ kT ·¸
© q¹
ba÷ıntısıyla mutlak olarak belirlenmiú olur. MOS tranzistorlarda ise e÷im ID
doyma bölgesi savak akımı dıúında tranzistorun geometrisine, yani (W/L)
oranına da ba÷lı olmaktadır. gmb iletkenli÷i gövde etkisini gösteren bir
büyüklüktür ve gövde etkisi VBS gerilimi ile arttı÷ından, wID /wVBS úeklinde ifade
edilir. Bu türev alındı÷ında
Ob
J
2 > V BS 2I F @
(1.9)
olmak üzere
g mb
Ob . g m
(1.10)
ba÷ıntısı elde edilir.
Devre hesaplarında Ob katsayısından çok
Db
1
1 Ob
(1.11)
ba÷ıntısıyla tanımlanan gövde etkisi faktörü kullanılmaktadır. Ba÷ıntının
çıkartılıúına daha sonra de÷inilecektir.
rds (yahut ro ) çıkıú direnci kanal boyu modülasyonundan ileri gelmekte
ve
rds
wV DS
wI D V
GS sabit
1
O. I D
(1.12)
ba÷ıntısıyla verilmektedir. rds direncinin de÷eri megaohmlardan birkaç kiloohm
mertebesine kadar de÷iúebilir.
Cgs geçitten kayna÷a ve kanalın kısılmamıú kısmına iliúkin kapasitedir.
Bu kapasitenin de÷eri birim yüzey kapasitesi COX ile geçit oksidi ile kaynak ve
kanal arasında kalan alanın çarpıma ba÷lıdır ve
1.6
C gs
2
WLCOX
3
(1.13)
ba÷ıntısıyla tanımlanır. Bu bileúenin yanısıra, Cgs kapasitesinin geçitin kaynak
bölgesine iliúkin bindirme kapasitesi nedeniyle sabit de÷erli bir parazitik bileúeni
daha bulunmaktadır. Bu bileúenin de (1.13) ba÷ıntısıyla verilen bileúene
eklenmesi gerekir.
Cgd büyüklü÷ü, geçit ile savak arasında kalan bölgeden ileri gelen
kapasitedir. Di÷er kapasiteler için de benzer düúünceler ileri sürülebilir. Doyma
bölgesinde çalıúmada bu kapasite geçitin savak bölgesine iliúkin bindirme
kapasitesinden oluúur ve çok küçük de÷erlidir. Ancak, kuvvetlendirici
devrelerinde Miller etkisi nedeniyle bu küçük de÷erli Cgd kapasitesi en önemli
kapasite olmaktadır.
Eúde÷er devrede yer alan Csb ve Cdb kapasiteleri, savak ve kaynak
bölgeleri ile taban arasındaki tıkama yönünde kutuplanmıú jonksiyonlara iliúkin
kapasitelerdir. Bu jonksiyon kapasiteleri
Csb
Cdb
Csbo
1/ 2
§ VSB ·
¨¨1 ¸
I0 ¸¹
©
Cdbo
1/ 2
§ VDB ·
¸
¨¨1 I0 ¸¹
©
(1.14)
(1.15)
úeklinde tanımlanmıúlardır. Bu ba÷ıntılarda Csbo ve Cdbo büyüklükleri ilgili
jonksiyonlara iliúkin sıfır kutuplama kapasiteleri, VSB kaynak taban gerilimi, VDB
savak taban gerilimi, I0 büyüklü÷ü de jonksiyonlara iliúkin potansiyel seddidir.
Geçit ve taban arasında yer alan Cgb kapasitesi geçit malzemesi ile tabanın aktif
eleman bölgesi dıúında kalan kısmı arasında oluúan parazitik oksit kapasitesidir.
1.7
KAYNAKLAR
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
H. Kuntman, Analog tümdevre tasarımı, Sistem yayınları, østanbul, 1992.
H. Kuntman, Analog MOS tümdevre tasarımı (Endüstri Semineri Notu), øTÜ øleri
Elektronik Teknolojileri Araútırma Geliútirme Vakfı (ETA), Uygulamaya özgü
tümdevre teknolojileri yaz okulu notları, østanbul,1993.
H. Kuntman, øleri analog tümdevre tasarımı: Analog devreler, (Endüstri Semineri
Notu), øTÜ øleri Elektronik Teknolojileri Araútırma Geliútirme Vakfı (ETA),
østanbul,1994.
P.R. Gray, R.G. Meyer, Analysis and design of analog integrated circuits, John
Wiley, 1984.
R. Gregorian, G.C. Temes, Analog MOS integrated circuits for signal processing,
John Wiley, 1986.
A.B. Grebene, Bipolar and MOS analog integrated circuit design, John Wiley,
1984.
F. Riedel, MOS Analogtechnik, Oldenburg Verlag, Wien, 1988.
P.E. Allen and D.R. Holberg, CMOS analog circuit design, Holt, Rinehart and
Winston Inc., New York, 1987.
P. Antognetti, G. Massobrio, Semiconductor device modeling with SPICE, Mc
Graw Hill, 1988.