CPU VE GPU ÜZERİNDE FREKANS SEÇİCİ YÜZEY UYGULAMALARI
İfakat Merve BAYRAKTAR
YÜKSEK LİSANS TEZİ
ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ANABİLİM DALI
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
NİSAN 2015
İFAKAT MERVE BAYRAKTAR tarafından hazırlanan “CPU VE GPU ÜZERİNDE FREKANS
SEÇİCİ YÜZEY UYGULAMALARI” adlı tez çalışması aşağıdaki jüri tarafından OY BİRLİĞİ ile
Gazi Üniversitesi Elektrik Elektronik Mühendisliği Anabilim Dalında YÜKSEK LİSANS TEZİ
olarak kabul edilmiştir.
Danışman: Doç. Dr. Nursel AKÇAM
Elektrik Elektronik Mühendisliği Anabilim Dalı, Gazi Üniversitesi
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum
...…………………
Başkan : Prof. Dr. Etem KÖKLÜKAYA
Elektrik Elektronik Mühendisliği Anabilim Dalı, Gazi Üniversitesi
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum
…………………...
Üye : Yrd. Doç. Dr. Mustafa ÖZDEN
Elektrik Elektronik Mühendisliği Anabilim Dalı, Kırıkkale Üniversitesi
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum
Tez Savunma Tarihi:
…………………...
14/04/2015
Jüri tarafından kabul edilen bu tezin Yüksek Lisans Tezi olması için gerekli şartları yerine
getirdiğini onaylıyorum.
…………………….…….
Prof. Dr. Şeref SAĞIROĞLU
Fen Bilimleri Enstitüsü Müdürü
ETİK BEYAN
Gazi Üniversitesi Fen Bilimleri Enstitüsü Tez Yazım Kurallarına uygun olarak
hazırladığım bu tez çalışmasında;
Tez içinde sunduğum verileri, bilgileri ve dokümanları akademik ve etik kurallar
çerçevesinde elde ettiğimi,
Tüm bilgi, belge, değerlendirme ve sonuçları bilimsel etik ve ahlak kurallarına uygun
olarak sunduğumu,
Tez çalışmasında yararlandığım eserlerin tümüne uygun atıfta bulunarak kaynak
gösterdiğimi,
Kullanılan verilerde herhangi bir değişiklik yapmadığımı,
Bu tezde sunduğum çalışmanın özgün olduğunu,
bildirir, aksi bir durumda aleyhime doğabilecek tüm hak kayıplarını kabullendiğimi beyan
ederim.
(İmza)
İfakat Merve BAYRAKTAR
14/04/2015
v
CPU VE GPU ÜZERİNDE FREKANS SEÇİCİ YÜZEY UYGULAMALARI
(Yüksek Lisans Tezi)
İfakat Merve BAYRAKTAR
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
Nisan 2015
ÖZET
2,4 GHz, 3,6 GHz, 4,9 GHz, 5 GHz ve 5,9 GHz frekans bantları IEEE 802.11
protokolünde belirtilen WLAN kanallarıdır. Cihazlar, genellikle 2,4 GHz frekansında
kullanılmaktadırlar. Fakat çoğu durumda, kanal sayısının azlığı ve bu frekansta çalışan
cihazların çok olması nedeniyle verimli kullanım sağlanamamaktadır. 5 GHz frekansının
kullanılmasıyla bu durumun önüne geçilebilecektir. Kanal sayısının çokluğu ve bu
frekansta çalışan cihazların az olması sayesinde daha verimli kullanım sağlanacaktır. Bu
kapsamda, 5 GHz frekans bandında girişimin önlenmesi ve istemeyen dalgaların
engellenmesi için bant durduran FSY tasarımı yapılmıştır. Bu tasarımla FSY‘nin 5 GHz
frekans bandındaki kalkanlama etkinlikleri incelenmiştir. Bir elektromanyetik dalga iletken
bir yüzeye geldiği zaman iletken üzerinde akım indüklenir. İndüklenen bu akımlardan
dolayı saçılmalar olur. FSY tasarımında ilk olarak dalga denklemlerinin ifadesi elde
edilmiştir. Ardından saçılan dalgaların denklemleri vektör potansiyellere göre yazılmıştır.
İletken yama üzerinde indüklenen akım ile bu akımın FSY içinde bulunduğu ortamdaki
herhangi bir noktada meydana getirdiği manyetik vektör potansiyeli arasındaki bağlantı
Green fonksiyonları ile ifade edilmiştir. Momentler metodu uygulanarak doğrusal denklem
sistemleri elde edilmiştir. Elde edilen doğrusal denklem sistemleri farklı matris boyutları
için CPU ve GPU üzerinde ayrı ayrı hesaplanmıştır. Denklem sistemlerinin çözümünden
saçılım ve iletim katsayıları bulunmuştur. Bu katsayılar kullanılarak akım yoğunlukları
elde edilmiştir. Akım yoğunluklarından elektrik alanlarının ifadesi elde edilerek FSY‘nin
kalkanlama etkinlikleri incelenmiştir. Filtre cevabı ve kalkanlama etkinliği kararlı
olduklarından dolayı, 5 GHz frekans bandında girişimin önlenmesi ve istemeyen dalgaların
engellenmesi için FSY tasarımda kare tipi yama elemanlar tercih edilmiş olup; kare tipi
yama elemanların kararlı sonuçlar verdiği gözlemlenmiştir. Ayrıca, Ax = b doğrusal
denklem sistemlerinin çözümünde, CPU ve GPU ayrı ayrı test edilmiştir. 220 x 220
boyutundaki bir “A” matrisi ve 220 x 1 boyutundaki bir “b” vektörünün çözümü GPU
üzerinde yaklaşık 0.19 ms’de, CPU üzerinde yaklaşık 6.22 ms’de gerçekleştirilmiştir.
GPU’nun sistemin hızını artırdığı (yaklaşık 33 kat) ve CPU ‘ya göre daha etkin çözümler
sağladığı gözlemlenmiştir.
Bilim Kodu
: 905.1.038
Anahtar Kelimeler : Frekans Seçici Yüzeyler, Momentler Yöntemi, Merkezi İşlemci
Birimi (CPU), Grafik İşlemci Birimi (GPU)
Sayfa Adedi
: 59
Danışman
: Doç. Dr. Nursel AKÇAM
vi
THE FREQUENCY SELECTIVE SURFACE APPLICATIONS ON CPU AND GPU
(M. Sc. Thesis)
İfakat Merve BAYRAKTAR
GAZİ UNIVERSITY
GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES
April 2015
ABSTRACT
2,4 GHz, 3,6 GHz, 4,9 GHz, 5 GHz and 5,9 GHz frequency bands are WLAN channels
specified in the IEEE 802.11 protocol. The devices are often used at the 2,4 GHz
frequency. But the efficient use cannot be achieved in most cases due to limited number of
channels and many of these devices working at this frequency. This situation can be
prevented by using the 5 GHz frequency. The efficient use can be achieved owing to
enough number of channels and few devices working at this frequency. FSS band stop
filter has been designed to prevent initiatives and stop inappropriate waves at the 5 GHz
frequency bands in this context. Shielding effectiveness of FSS has been analyzed at the 5
GHz frequency bands with this design. When the electromagnetic waves are coming to a
conductive surface, currents are induced on the conductor. Scattering are happened
because of these induced currents. First off all, the expression of the wave equations are
written. Then, the scattered wave equations are written according to the vector potentials.
The relations between the induced currents on the conductive patch and the magnetic
vector potential which is created by currents that caused at any point in the FSS are
expressed by Green's functions. System of linear equations is calculated by applying
Method of Moments. These linear equations are solved separately on the CPU and GPU
for different sizes of matrix. Scattering and transmission coefficients are calculated from
the solution of the linear equations. The current density is calculated by using these
coefficients. The electric fields are calculated by current density and the shielding
effectiveness of FSS is analyzed. The square type of the patch elements are preferred to the
design of FSS for blocking interference and preventing unsuitable waves at 5 frequency
band owing to stability of filter response and shielding effectiveness. It is observed that
square type of the patch elements give stable results. In addition, CPU and GPU are tested
with the solution of systems of linear equations Ax = b separately. GPU time is 0.19 ms
and CPU time is 6.22 ms approximately for solution of the A matrix size of 220x220 and b
vector size of 220x220. GPU increases the speed of system (approximately 33 times) and
provides more effective solutions according to CPU as results.
Science Code
Key Words
:
:
Page Number
Supervisor
:
:
905.1.038
Frequency Selective Surfaces, Method of Moments, Central
Processing Unit (CPU), Graphics Processing Unit (GPU)
59
Assoc. Prof. Dr. Nursel AKÇAM
vii
TEŞEKKÜR
Bu tez çalışmasının gerçekleşmesinde, sahip olduğu bilgi birikimini benimle paylaşıp, bana
yol gösteren ve katkılarıyla tezin bugünlere gelmesini sağlayan Hocam Doç. Dr. Nursel
AKÇAM ‘a teşekkürü bir borç bilirim. Çalışmalarım sırasında her zaman değerli destek ve
fedakârlıklarını esirgemeyen biricik aileme ve tüm dostlarıma teşekkürlerimi sunarım.
viii
İÇİNDEKİLER
Sayfa
ÖZET ..............................................................................................................................
v
ABSTRACT ....................................................................................................................
vi
TEŞEKKÜR ....................................................................................................................
vii
İÇİNDEKİLER ..............................................................................................................
viii
ÇİZELGELERİN LİSTESİ.............................................................................................
x
ŞEKİLLERİN LİSTESİ ..................................................................................................
xi
SİMGELER VE KISALTMALAR.................................................................................
xiv
1. GİRİŞ.......................................................................................................
1
2. FSY TASARIMI...........................................................................................................................................
7
2.1. FSY Tasarım Parametreleri...................................................................................
8
2.2. Dalga Denklemlerinin Yazılması ............................................................................
10
2.3. Green Fonksiyonlarının Uygulanması .....................................................................
12
2.4. Momentler Yöntemi ................................................................................................
17
2.5. Hata ve Baz Fonksiyonlarının Tanımlanması ......................................................
19
2.6. Doğrusal Denklem Sisteminin Çözümü ................................................................
21
2.7. Uygun Çözücünün Seçilmesi .................................................................................
24
2.8. Denklem Sisteminin GPU ve CPU Üzerinde Uygulanması ................................
26
3. SİSTEM TASARIMI VE ANALİZ SONUÇLARI .......................................
31
3.1. FSY ve Yama Boyutlarının Belirlenmesi ..............................................................
31
3.2. Gelen Dalga Açılarına ve Polarizasyonuna Göre Testler Yapılması.......................
36
3.3. CPU ve GPU Testleri ..............................................................................................
48
4. SONUÇLAR VE ÖNERİLER .............................................................................
51
KAYNAKLAR ...............................................................................................................
55
ix
Sayfa
ÖZGEÇMİŞ ........................................................................................................................
59
x
ÇİZELGELERİN LİSTESİ
Çizelge
Sayfa
Çizelge 2.1. Gauss eliminasyon, LU ve QR ayrıştırma yöntemleri çözüm
süreleri.........................................................................................................
24
Çizelge 2.2. CPU ve GPU üzerinde “for” ve “parfor” döngü süreleri ............................
28
Çizelge 3.1. Ax = b doğrusal denklem sisteminin CPU ve GPU üzerindeki
çözüm süreleri .............................................................................................
48
xi
ŞEKİLLERİN LİSTESİ
Şekil
Sayfa
Şekil 1.1. FSY yama ve oyuk tipi elaman .......................................................................
1
Şekil 1.2. FSY eleman tipleri ..........................................................................................
2
Şekil 1.3. FSY filtre tasarımları ......................................................................................
2
Şekil 2.1. FSY tasarım akış diyagramı............................................................................
8
Şekil 2.2. FSY tasarım parametreleri ..............................................................................
9
Şekil 2.3. Kare tipinde yama eleman yapısı ....................................................................
10
Şekil 2.4. FSY üzerinde gelen dalga ...............................................................................
13
Şekil 2.5. Tam bölge ve alt bölge baz fonksiyonları.......................................................
19
Şekil 2.6. Enine dalgalar .................................................................................................
20
Şekil 2.7. Gauss eliminasyon, LU ve QR ayrıştırma yöntemleri çözüm
süreleri grafiği .................................................................................................
25
Şekil 2.8. CPU ve GPU mimarisi ...................................................................................
26
Şekil 2.9. Matlab parfor komut seti işleyişi ....................................................................
27
Şekil 2.10. CPU ve GPU üzerinde for ve parfor döngü süreleri grafiği .........................
29
Şekil 3.1. FSY uzunluğu: 10 mm, yama uzunluğu: 1 mm için
kalkanlama etkinliği ........................................................................................
32
Şekil 3.2. FSY uzunluğu: 20 mm, yama uzunluğu: 1 mm için
kalkanlama etkinliği ........................................................................................
32
Şekil 3.3. FSY uzunluğu: 30 mm, yama uzunluğu: 1 mm için
kalkanlama etkinliği ........................................................................................
33
Şekil 3.4. FSY uzunluğu: 40 mm, yama uzunluğu: 1 mm için
kalkanlama etkinliği ........................................................................................
33
Şekil 3.5. FSY uzunluğu: 50 mm, yama uzunluğu: 1 mm için
kalkanlama etkinliği ........................................................................................
34
Şekil 3.6. FSY uzunluğu: 50 mm, yama uzunluğu: 10 mm için
kalkanlama etkinliği ........................................................................................
34
xii
Şekil
Sayfa
Şekil 3.7. FSY uzunluğu: 50 mm, yama uzunluğu: 20 mm için
kalkanlama etkinliği ........................................................................................
35
Şekil 3.8. FSY uzunluğu: 50 mm, yama uzunluğu: 30 mm için
kalkanlama etkinliği ........................................................................................
35
Şekil 3.9. FSY uzunluğu: 50 mm, yama uzunluğu: 40 mm için
kalkanlama etkinliği ........................................................................................
36
Şekil 3.10. Yatay polarizasyonda θ = 0° için kalkanlama etkinliği ...............................
37
Şekil 3.11. Yatay polarizasyonda θ = 30° için kalkanlama etkinliği ............................
37
Şekil 3.12. Yatay polarizasyonda θ = 60° için kalkanlama etkinliği ............................
38
Şekil 3.13. Dikey polarizasyonda θ = 0° için kalkanlama etkinliği ..............................
38
Şekil 3.14. Dikey polarizasyonda θ = 30° için kalkanlama etkinliği ............................
39
Şekil 3.15. Dikey polarizasyonda θ = 60° için kalkanlama etkinliği ............................
39
Şekil 3.16. Yatay polarizasyonda φ = 0° için kalkanlama etkinliği ..............................
40
Şekil 3.17. Yatay polarizasyonda φ = 30° için kalkanlama etkinliği ............................
40
Şekil 3.18. Yatay polarizasyonda φ = 60° için kalkanlama etkinliği ............................
41
Şekil 3.19. Dikey polarizasyonda φ = 0° için kalkanlama etkinliği ..............................
41
Şekil 3.20. Dikey polarizasyonda φ = 30° için kalkanlama etkinliği............................
42
Şekil 3.21. Dikey polarizasyonda φ = 60° için kalkanlama etkinliği............................
42
Şekil 3.22. Farklı kare yama sayıları kullanarak FSY tasarımı ......................................
43
Şekil 3.23. FSY:50 mm, Yama:30 mm için dikey polarizasyonda θ = 0° ve
1 adet kare yama için kalkanlama etkinliği...................................................
44
Şekil 3.24. FSY:50 mm, Yama:10 mm için dikey polarizasyonda θ = 0° ve
4 adet kare yama için kalkanlama etkinliği...................................................
44
Şekil 3.25. FSY:50 mm, Yama:7 mm için dikey polarizasyonda θ = 0° ve
9 adet kare yama için kalkanlama etkinliği...................................................
45
Şekil 3.26. FSY:50 mm, Yama:5 mm için dikey polarizasyonda θ = 0° ve
16 adet kare yama için kalkanlama etkinliği.................................................
45
xiii
Şekil
Sayfa
Şekil 3.27. FSY:50 mm, Yama:30 mm için dikey polarizasyonda θ = 30° ve
1 adet kare yama için kalkanlama etkinliği...................................................
46
Şekil 3.28. FSY:50 mm, Yama:10 mm için dikey polarizasyonda θ = 30° ve
4 adet kare yama için kalkanlama etkinliği...................................................
46
Şekil 3.29. FSY:50 mm, Yama:7 mm için dikey polarizasyonda θ = 30° ve
9 adet kare yama için kalkanlama etkinliği...................................................
47
Şekil 3.30. FSY:50 mm, Yama:5 mm için dikey polarizasyonda θ = 30° ve
16 adet kare yama için kalkanlama etkinliği.................................................
47
Şekil 3.31. Ax = b doğrusal denklem sisteminin CPU ve GPU üzerindeki
çözüm süreleri grafiği ...................................................................................
49
xiv
SİMGELER VE KISALTMALAR
Bu çalışmada kullanılmış simgeler ve kısaltmalar, açıklamaları ile birlikte aşağıda
sunulmuştur.
Simgeler
Açıklamalar
sn
Saniye
ms
Milisaniye
mm
Milimetre
dB
Desibel
GHz
Giga Hertz
E
Elektrik alan şiddeti
D
Elektrik akı yoğunluğu
H
Manyetik alan şiddeti
B
Manyetik akı yoğunluğu
µ
Manyetik geçirgenlik katsayısı
ε
Elektriksel geçirgenlik katsayısı
J
Birim alan başına akım yoğunluğu
ρ
Elektrik yük yoğunluğu
σ
Elektriksel iletkenlik
Kısaltmalar
Açıklamalar
CPU
Central Processing Unit (Merkezi İşlemci Birimi)
FSS
Frequency Selective Surfaces
FSY
Frekans Seçici Yüzeyler
GPU
Graphic Processing Unit (Grafik İşlemci Birimi)
LU
Lower Upper
MoM
Method of Moments (Momentler Yöntemi)
WLAN
Wireless Local Area Network
(Kablosuz Yerel Alan Ağı)
1
1. GİRİŞ
Elektromanyetik dalgalar, boşlukta veya maddesel bir ortamda yayılan, elektrik ve
manyetik alan bileşenlerinden oluşan dalgalardır. Elektromanyetik dalga kavramı ilk
olarak James Clerk Maxwell tarafından yazılan Elektromanyetik Alanın Dinamik Teorisi
[1] kitabının yayınlaması ile ortaya çıkmıştır. Dalga boylarına göre sınıflandırılan
elektromanyetik dalgaların: radyo dalgaları, mikrodalgalar, kızılötesi ışınlar, görünür ışık,
morötesi ışınlar, X ışınları ve gama ışınları gibi çeşitleri bulunur. Elektromanyetik
dalgaların savunma sanayinde, radarlarda, takip sistemlerinde, tıp alanında, tomografide,
cep telefonlarında vb. birçok alanda uygulamaları mevcuttur.
Elektromanyetik dalgalar bir yüzeye geldiği zaman yüzeyin özelliklerine bağlı olarak
dalganın bir kısmı saçılır, bir kısmı da ilerler. Frekans seçici yüzeyler (FSY), gelen
elektromanyetik dalganın frekansına bağlı olarak yansıma ve iletim karakteristiklerini
değiştiren, periyodik dielektrik yüzeyler ve dielektrik yüzey üzerine periyodik olarak
yerleştirilmiş Şekil 1.1.‘deki gibi iletken yamalar veya periyodik oyuklar açılarak
oluşturulan yapılardır.
Yam
a Tip
i
O yuk
Şekil 1.1. FSY yama ve oyuk tipi elaman
Tipi
2
Bu özellikleri sayesinde FSY, istenilen frekanstaki dalgaları geçiren ve durdurulması
istenen dalgaları geçirmeyen, elektromanyetik dalgalar için filtre gibi çalışırlar.
Literatürde, Şekil 2.1.‘de gösterildiği üzere FSY tasarımında kullanılan farklı şekillerde
eleman tipleri vardır.
Şekil 1.2. FSY eleman tipleri
FSY, Şekil 1.3.‘te gösterildiği gibi tasarımlarına bağlı olarak alçak geçiren, yüksek
geçiren, bant geçiren ve bant durduran filtreler olarak kullanılır.
Alçak Geçiren
Yüksek Geçiren
Band Durduran
Band Geçiren
Şekil 1.3. FSY filtre tasarımları
3
Filtreleme özellikleri sayesinde FSY, uydu sistemlerinde [2], anten ve haberleşme
sistemlerinde [3], Radyo Frekansı ile Tanımlama (Radio Frequency Identification - RFID)
uygulamalarında [4], özellikle elektromanyetik dalga kalkanlama uygulamaları başta
olmak üzere askeri alanlarda [5], radar uygulamalarında [6], sivil uygulamalarda [7] ve 21.
yy ‘dan itibaren de 3G ve GSM ağlarında [8] kullanılmaya başlanmıştır.
Frekans seçici yüzeylerin (FSY) ilk uygulamaları Rittenhouse tarafından bir lambaya
bakıldığında ışık spektrumundaki bazı renklerin bastırıldığının farkına varılmasıyla
başlamıştır [9]. Bu optik olay FSY çalışma prensibinin temelini ortaya koymuştur.
Bilgisayar teknolojisindeki gelişmeler sayesinde, Momentler Metodu (Method of Moments
- MoM) [10], Zamanda Sonlu Farklar Metodu (Finite Difference Time Domain Method FDTD) [11], Sonlu Eleman Metodu (Finite Element Method - FEM) [12], Ortak Empedans
Metodu (Mutual Impedance Method - MIM) [13], Eşdeğer Devre Modeli (Equivalent
Circuit Models - ECM) [14] gibi yöntemler FSY ’deki saçılma analizlerini yapabilmek için
literatürde yaygın olarak kullanılmaya başlanmıştır.
Özellikle homojen yapıda olan FSY’deki saçılma analizlerinde, etkili ve basit çözümler
sunan MoM en çok tercih edilen yöntemlerden biridir [15]. Elektromanyetik bir dalga
FSY’e geldiği zaman, dalga FSY yüzeyinde akım indüklenmesine neden olur ve saçılımlar
meydana gelir. Elektrik alan ile bu indüklenen akım arasında bir ilişki vardır. Bu ilişkiden
yola çıkarak frekans alanında MoM uygulandığında; doğrusal denklem sistemleri elde
edilir. Bu denklem sistemlerinin bilgisayar yardımıyla çözülmesiyle saçılım ve iletim akım
yoğunluğu katsayıları hesaplanır. Akım yoğunluklarından elektrik alanlarının ifadesi elde
edilir. Gelen elektrik alan ile ilerleyen elektrik alan arasındaki ilişkiden ise FSY‘nin
kalkanlama etkinlikleri hesaplanır.
Literatürde, genetik algoritma [16], yapay sinir ağları [17], V-Dipol baz fonksiyonu [18],
Ewald Dönüşümü [19], Rao Wilton Glisson (RWG) bas fonksiyonu [20], Maehly
Yaklaşımı [21] vb. birçok farklı yöntem MoM uyarlanarak FSY analizinde kullanılır.
Ayrıca Floqet modları ve Green fonksiyonları da [22] FSY analizinde yaygın olarak
kullanılır.
4
Tezin Kapsamı
FSY tasarımında dielektrik ortamın parametreleri, FSY’nin geometrisi, periyodu, yama
veya oyuk olması, eleman tipi, diziler arası mesafe, gelen dalganın açısı ve polarizasyonu
vb. faktörler etkili olup, FSY’nin hangi frekanstaki dalgaları geçireceğini ve hangi
frekanstaki dalgaları durduracağını belirler.
Bu tez kapsamında 5 GHz frekans bandında, bant durduran bir FSY tasarımı yapılmıştır.
Bunun için izlenen yol aşağıdaki gibidir. Bir elektromanyetik dalga iletken bir yüzeye
geldiği zaman iletken yama üzerinde akım indüklenir. İndüklenen bu akım yayınım yapar
ve saçılmalar meydana gelir. İlk olarak dalga denklemleri elde edilir. Ardından, saçılan
dalgaların ifadesi, vektör potansiyellere göre yazılır. İletken yama üzerinde indüklenen
akım ile bu akımın FSY içinde bulunduğu ortamdaki herhangi bir noktada meydana
getirdiği manyetik vektör potansiyelinin arasındaki bağlantıyı ifade edebilmek amacıyla
Green Fonksiyonları [23] kullanılır. Ardından MoM’un uygulanmasıyla elde edilen
doğrusal denklem sistemlerinin çözülmesi gerekir. Bu çalışmada elde edilen doğrusal
denklem sistemlerinin çözümü için Merkezi İşlemci Birimleri (Central Processing Units CPU) ve Grafik İşlemci Birimleri (Graphic Procesing Units - GPU) kullanılmıştır.
GPU, CPU‘ya göre hızlı ve etkin çözümler sağlaması sayesinde, son yıllarda bilimsel
hesaplamalarda, görüntü ve video işlemede, akışkan dinamiği simülasyonlarında, biyoloji,
kimya ve tıp alanında kullanılmaya başlamıştır [24]. Özellikle GPU’nun matris vektör
çarpımı işlemlerini optimize edecek şekilde tasarlanmaları, iteratif denklem sistemleri
çözüm algoritmalarının hızlı bir şekilde uygulanabilmelerini sağlamıştır.
Tez kapsamında MoM’un uygulanmasıyla elde edilen doğrusal denklem sistemlerinin
çözümü CPU ve GPU üzerinde farklı matris boyutları için ayrı ayrı yapılarak performans
analizi yapılmıştır. Denklem sistemlerinin çözümü bize saçılım ve iletim katsayılarını
vermektedir. Saçılım ve iletim katsayılarını, akım yoğunluklarını ifade etmekte kullanılır.
Akım yoğunluklarını kullanarak da elektrik alanlarının ifadesi elde edilerek, gelen ve
ilerleyen elektrik alan ifadelerine bağlı olarak FSY‘nin kalkanlama etkinlikleri
hesaplanmıştır.
5
Kalkanlama istenmeyen elektromanyetik dalgaların olumsuz etkilerinin azaltılması amacı
ile yapılan elektromanyetik durdurma işlemidir. Kalkanlama kaçak veya istenmeyen
alanların azaltılması amacıyla kullanılır. Kalkanlamanın temeli Faraday Kafesine dayanır.
Bu topraklamalı kafes sayesinde elektromanyetik dalganın içeri girmesi veya dışarı
çıkması engellenir.
Tezin Amacı
WLAN kanalları yasal olarak IEEE 802.11 protokolünde belirtilen 2.4 GHz, 3.6 GHz, 4.9
GHz, 5 GHz ve 5.9 GHz bantları olmak üzere 5 farklı frekansta kullanılır. Cihazlar
genellikle 2.4 GHz frekansını kullandığından bazı durumlarda verimli kullanım
sağlanamaz. Ülkemizde 5 GHz frekansının kullanılması durumunda, hem kullanılacak
kanal sayısının çokluğu, hem de bu frekansta çalışan cihazların az olması nedeniyle daha
verimli kullanım sağlanacağı düşünülmektedir. Bu tez çalışmasının amacı 5 GHz frekans
bandında girişimin önlenmesi ve istemeyen dalgaların engellenmesi için bant durduran
FSY tasarımı yapılması ve FSY‘nin kalkanlama etkinliklerinin incelenmesidir. FSY‘nin
kalkanlama etkinlikleri gelen dalganın farklı geliş açıları ve polarizasyon durumlarına göre
incelenmiştir. Ayrıca FSY’nin tasarım yapısı değiştirilerek de kalkanlama etkinlikleri
gözlemlenmiştir.
Çalışmada, FSY‘nin kalkanlama etkinliklerini inceleyebilmek için ortaya çıkan denklem
sistemlerinin çözümü CPU ve GPU üzerinde farklı matris boyutları için ayrı ayrı yapılarak,
GPU ‘nun ne kadar hızlı ve etkin çözümler sağladığı analiz edilmiş ve CPU ile GPU
performans karşılaştırmaları yapılmıştır.
Tezin Ana Hatları
Birinci bölüm giriş bölümü olup, FSY tasarımdan kullanılan eleman tipleri ve şekilleri,
FSY filtre tipleri ve kullanım alanları, FSY analizinde kullanılan yöntemler, özellikle
MoM ile kullanılan teknikler, FSY‘nin kalkanlama etkinlikleri ve FSY hakkında literatür
özeti verilmiştir. Ayrıca tezin kapsamı ve ana hatları konusunda kısaca giriş yapılarak tezin
amacına dair bilgiler verilmiştir.
6
İkinci bölümde FSY yapısı tasarlanırken izlenilen adımlar, tasarımın nasıl yapıldığı ve
hangi yöntemlerin kullanıldığı anlatılmıştır. Doğrusal denklem sistemlerinin çözümüne
yönelik
tekniklerden
ve
FSY
etkinliklerinin
bahsedilmiştir.
Doğrusal
denklem
sistemlerinin çözümü için CPU ve GPU yapılarından bahsedilerek, paralel programlama
için kullanılacak platform ve araçlar tanıtılmıştır. Ayrıca CPU ve GPU programlamasına
dair döngü örnekleri yapılarak, iterasyon sayılarına bağlı karşılaştırmalı örnekler de
sunulmuştur.
Üçüncü bölümde sistem tasarımı ve analiz sonuçları kısmı yer almaktadır. Tasarımı
yapılan FSY‘nin kalkanlama etkinlikleri, farklı geliş açıları ve polarizasyon durumlarına
göre test edilmiştir. Test sonuçları, grafikleri ve değerlendirmeleri verilmiştir. FSY
tasarımı değiştirilerek farklı sayıdaki eleman tipleri için farklı geliş açıları ve polarizasyon
durumlarına göre testler yapılmıştır. Test sonuçları ayrıntılı olarak yorumlanmıştır.
Ayrıca bu bölümde elde edilen doğrusal denklem sistemlerinin çözümü CPU ve GPU
üzerinde gerçekleştirilmiş ve performans analizleri yapılarak sonuçlar yorumlanmıştır.
Sonuçlar ve öneriler kısmı da bölüm 4’de yer almaktadır.
7
2. FSY TASARIMI
Bu tez çalışmasında 5 GHz frekans bandında girişimin önlenmesi ve istemeyen dalgaların
engellenmesi için bant durduran FSY tasarımı yapılmıştır. FSY tasarımı yaparken:
Dalga denklemlerinin yazılması,
Saçılan dalgaların denklemleri ile vektör potansiyellerinin ifade edilmesi,
İndüklenen akım ile manyetik vektör potansiyelinin arasındaki bağlantının Green
fonksiyonları ile ifade edilmesi,
MoM uygulanması,
En uygun çözücünün seçilerek, elde edilen doğrusal denklem sistemlerinin CPU ve
GPU üzerinde çözdürülmesi,
Denklem sistemlerinin çözümünden saçılım ve iletim katsayılarının hesaplanması,
Katsayılar kullanılarak akım yoğunluklarının ifade edilmesi,
Akım yoğunluklarından elektrik alanlarının ifadesinin elde edilerek FSY‘nin
kalkanlama etkinliklerinin hesaplanması gerekmektedir.
Bu amaçla Şekil 2.1. ‘de verilen akış diyagramı adım adım takip edilerek FSY tasarımı
gerçekleştirilmiştir.
8
Frekans Seçici Yüzey
Tasarım Parametreleri
Sonuçlar
Elektrik Alanlarının Hesaplanarak
Kalkanlama Etkinliklerinin Bulunması
Dalga
Denklemlerinin
Yazılması
Yansıma ve İletim Akım Katsayılarının Hesaplanarak
Akım Yoğunluklarının Elde Edilmesi
Green
Fonksiyonlarının
Uygulanması
Momentler
Yöntemi
Performans Karşılaştırması
Denklem
sisteminin GPU
üzerinde çözümü
Hata ve Baz
Fonksiyonlarının
Tanımlanması
Denklem
sisteminin CPU
üzerinde çözümü
Ax=b
Denklem
Sistemi
Şekil 2.1. FSY tasarım akış diyagramı
2.1. FSY Tasarım Parametreleri
FSY tasarımında, FSY’nin etkinliğini belirleyen Şekil 2.2. ‘de verildiği gibi, dielektrik
ortamın parametreleri, FSY’nin geometrisi, periyodu, eleman tipi, diziler arası mesafe
gelen dalganın açısı, polarizasyonu gibi birçok parametre bulunur.
9
Yama
Tipi
Elem
an
ktrik
Malz
eme
Dizile
Diele
r aras
ı me
safe
Periyodik
Diziler
Üstte
n
görün
ü
ma
Ya tları
yu
Bo
ş
Şekil 2.2. FSY tasarım parametreleri
Çalışmada tasarlanan FSY‘de, kare tipinde yama elemanlar kullanılmıştır (Şekil 2.2.).
Kare tipinde yama elemanlar kullanılma nedeni ise, bu tür yapıların elektromanyetik
dalganın geliş açısındaki değişimlere göre daha kararlı bir filtre yapısında olmalarından
dolayıdır [25]. Bu sayede farklı geliş açıları ve polarizasyondaki dalgalar için daha kararlı
bir bant durduran filtre tasarımı yapılabilmesi mümkündür. Bu kapsamda kare tipinde
yama elemanlar kullanılarak FSY tasarımı yapabilmek için, Şekil 2.3. ‘teki gibi FSY ve
yama kenar uzunlukları referans olarak alınmıştır. FSY ve yama boyutları, girdilerden ilki
olarak seçilmiştir.
10
FSY Kenar Uzunluğu
Y ekseni
Yama
Kenar
Uzunluğu
X ekseni
Şekil 2.3. Kare tipinde yama eleman yapısı
Elemanlar, kare tipinde yama eleman olarak ve uzunluklar da belirlendikten sonra FSY
tasarımı için gerekli olan dalga denklemlerinin ifadeleri elde edilecektir.
2.2. Dalga Denklemlerinin Yazılması
Maxwell denklemleri, elektrik alanlar ve manyetik alanlar arasındaki ilişkiyi ortaya koyan
denklem takımlarıdır. E; elektrik alan şiddeti (V/m), D; elektrik akı yoğunluğu
(Deplasman) (C/m2), H; manyetik alan şiddeti (A/m), B; manyetik akı yoğunluğu (T), ε;
elektriksel geçirgenlik katsayısı (F/m), μ; manyetik geçirgenlik katsayısı (H/m), J; birim
alan başına akım yoğunluğu (A/m2), ρ; elektrik yük yoğunluğu (C/m3) ve σ; elektriksel
iletkenlik (S) olmak üzere, Maxwell denklemleri Eş.(2.1-2.4) ile verilmektedir.
⃗⃗
⃗∇xE
⃗ = − ∂B
∂t
(2.1)
⃗⃗
⃗∇xH
⃗⃗ = J + ∂D
∂t
(2.2)
⃗ .D
⃗⃗ = ρ
∇
(2.3)
⃗∇. ⃗B = 0
(2.4)
11
Kaynakların bulunmadığı ortamlarda Maxwell denklemleri harmonik olarak
⃗ xE
⃗ = −jwB
⃗
∇
(2.5)
⃗∇xH
⃗⃗ = jwD
⃗
(2.6)
⃗∇. ⃗D
⃗ =ρ
(2.7)
⃗ .B
⃗ =0
∇
(2.8)
biçiminde yazılır.
Vektör manyetik potansiyeli ile manyetik akı yoğunluğu Eş.(2.9), manyetik alan şiddeti ile
manyetik akı yoğunluğu Eş.(2.10), elektrik alan şiddeti ile elektrik akı yoğunluğu Eş.(2.11)
ve elektrik alan şiddeti ile birim alan başına akım yoğunluğu Eş.(2.12) arasındaki ilişkiler
verilmiştir.
⃗
⃗B=∇
⃗ xA
(2.9)
⃗ =μH
⃗⃗
B
(2.10)
⃗D
⃗ =εE
⃗
(2.11)
⃗
J=σE
(2.12)
Zamanla değişen alanlarda E; elektrik alanı, A; manyetik vektör potansiyeli ile V; statik
elektrik potansiyeline bağlı olarak Eş.(2.13) ‘deki gibi elde edilir.
⃗⁄
⃗ = −∇
⃗ V − ∂A
E
∂t
(2.13)
Eş.(2.9)’un her iki tarafının rotasyoneli alınırsa, manyetik vektör potansiyeli ve manyetik
alan şiddeti ifadesi elde edilir.
⃗ = ⃗∇(∇
⃗∇xB
⃗ = ⃗∇x∇
⃗ xA
⃗ . ⃗A) − ∇2 ⃗A
(2.14)
⃗⁄
⃗ xB
⃗ =∇
⃗ x(μH
⃗⃗ ) = μ(∇
⃗ xH
⃗⃗ ) = μ (J + ∂D
∇
∂t)
(2.15)
12
Eş.(2.14) ve Eş.(2.15) eşitlenerek, birlikte yazılırsa;
⃗⃗
2 ⃗A
⃗
∂t
∂t2
⃗∇(∇
⃗ . ⃗A) − ∇2 ⃗A = μJ − ⃗∇ (με ∂V) − με ∂
(2.16)
ifadesi elde edilir.
Bu denklem farklı bir şekilde düzenlenirse;
∇2 ⃗A − με
⃗
∂2 ⃗A
∂t2
⃗⃗
⃗ . ⃗A + με ∂V)
= − μJ + ⃗∇ (∇
∂t
(2.17)
elde edilir.
Lorentz koşulu, manyetik vektör potansiyel ve statik elektrik potansiyeli arasındaki
bağıntıyı verir.
⃗⃗
⃗ . ⃗A + με ∂V = 0
∇
∂t
(2.18)
Eş.(2.18) Lorenz koşulu uygulanırsa; manyetik vektör potansiyeli için dalga denklemini
∇2 ⃗A − με
⃗⃗
∂2 A
∂t2
= −μJ
(2.19)
olarak elde edilir.
2.3. Green Fonksiyonlarının Uygulanması
Bu tez çalışmasında, FSY tasarımında kare tipinde yama eleman kullanıldığı için gelen
elektrik alanının ifadesini iki boyutta (x,y);
E Gelen = Eo ej(αox+βo y)
(2.20)
biçiminde ifade etmek mümkündür.
Eş.(2.20) α ve β katsayıları pozitif gerçek sabitleri göstermektedir. k ise dalga sayısı olmak
üzere aşağıdaki denklemlerle 𝑎0 , β0 ve k katsayıları
13
ao = ksin(θ) cos(∅)
(2.21)
βo = ksin(θ) sin(∅)
(2.22)
k = w√με
(2.23)
olarak verilir.
Elektromanyetik dalga FSY’ye geldiği zaman, FSY üzerinde akım indüklenir. İndüklenen
bu akımlardan dolayı saçılmalar olur ve gelen dalganın bir kısmı da FSY içinden geçerek
ilerler (Şekil 2.4.).
Sa
a
nD
e
y
le
İler
lga
an
çıl
Da
lga
Da
len
e
G
lga
Şekil 2.4. FSY üzerinde gelen dalga
Gelen ve saçılan elektrik alanının ifadesi, birim alan başına akım yoğunluğu cinsinden
⃗EGelen + ⃗E Saçılan =
J
σ
(2.24)
biçiminde ifade edilir.
Elektriksel iletkenlik (σ), bir iletkene uygulanan elektriksel alan etkisinde yük
taşıyıcılarının durumlarını ifade eder. Elektriksel iletkenliğe göre ortamlar 3 başlıkta
incelenebilir.
14
σ → ∞,
Mükemmel iletken ortam
σ = 0,
Kayıpsız ortam
σ ≠0,
Kayıplı ortam
Problem tipini mükemmel iletken ortamlara göre incelendiği için, gelen ve saçılan elektrik
alanları mükemmel iletken ortamlar (σ → ∞) için düzenlenirse, gelen ve saçılan elektrik
alan ifadeleri
⃗ Gelen + E
⃗ Saçılan = J = 0
E
σ→∞
(2.25)
olarak yazılır.
Lorentz koşulunu Eş.(2.18) uygulayarak manyetik vektör potansiyeli için elde ettiğimiz
dalga denklemini (Eş.(2.19)), bir noktanın uzaydaki konumunu diğer bir noktaya göre
belirleyen sabit “r” pozisyon vektörü ile gösterilirse, saçılan elektrik alanın ifadesi
⃗ (r) + 12 ∇
⃗ (r))]
⃗ Saçılan (r) = −jwμ [A
⃗ (∇
⃗ .A
E
k
(2.26)
biçiminde ifade edilir.
Green fonksiyonu homojen olmayan diferansiyel denklemlerin belirli sınır şartları altında
çözülmesini sağlayan bir metodtur. Bu kapsamda iletken yama üzerinde indüklenen akım
ile bu akımın FSY’nin içinde bulunduğu ortamdaki herhangi bir noktada meydana getirdiği
manyetik vektör potansiyelinin arasındaki bağlantıyı ifade edebilmek amacıyla Green
fonksiyonları kullanılabilir. Diğer bir deyişle, dalga denklemini çözebilmek ve manyetik
vektör potansiyelini hesaplayabilmek amacıyla (r) gözlem noktası ve (r’) kaynak noktası
olmak üzere Green fonksiyonları uygulanabilir.
İletken yama üzerinde indüklenen akım ile bu akımın FSY içinde bulunduğu ortamdaki
herhangi bir noktada meydana getirdiği manyetik vektör potansiyelinin arasındaki ilişki
Green fonksiyonu ile
⃗A(𝑟) = ∫ ⃗G(r, r ′ ) J(r′)ds′
(2.27)
15
biçiminde ifade edilir.
Manyetik vektör potansiyeli için Green fonksiyonunun çözümü Eş.(2.28) ile verilir [26].
⃗ =e
G
−jk|r−r′|
(2.28)
4π|r−r′|
Çalışmamamızda FSY tasarımında kare tipinde yama eleman kullanıldığı için elektrik alan
şiddetinde yazıldığı gibi (Eş.(2.20)), manyetik vektör potansiyeli ifadesini de iki boyutta
⃗ = ∂Ax + ∂Ay
⃗∇.A
∂x
(2.29)
∂y
yazmak mümkün olur.
Manyetik vektör potansiyeli için kısmı türevleri alarak Eş.(2.29) düzenlenirse
⃗ =
⃗ .∇
⃗ .A
∇
∂Ax ∂Ay
+
∂x
∂y
+
∂x
∂Ax ∂Ay
+
∂x
∂y
∂y
=(
∂2 Ax
∂x2
+
∂2 Ay
)(
∂x ∂y
∂2 Ay
∂y2
+
∂2 Ax
)
∂x ∂y
(2.30)
eşitliği elde edilir.
Gelen elektrik alanının x ve y bileşenlerini ve manyetik vektör potansiyelinin ifadesini
dalga denkleminde Eş.(2.19) yerine koyarak düzenlenirse; aşağıdaki
ExGelen = −
EyGelen = −
1
jwε
1
jwε
[
[
∂2 Ax
∂x2
∂2 Ay
∂y2
+ kAx +
+ kAy +
∂2 Ay
]
(2.31)
]
(2.32)
∂x ∂y
∂2 Ax
∂x ∂y
eşitlikler elde edilir.
Bu iki eşitlik Ex ve Ey bileşenleri için matris formunda yazılarak denklem sistemi elde
edilir.
[
Ex
] = −jwμ [
Ey
1+
1
1 ∂2
1
k2 ∂x2
k2 ∂x ∂y
∂2
k2 ∂x ∂y
1+
∂2
1 ∂2
k2 ∂y2
][
Ax
]
Ay
(2.33)
16
Gelen elektrik alanının ifadesine (Eş.(2.20)) benzer şekilde manyetik vektör potansiyelinin
ifadesi (x,y) için iki boyutlu olarak ⃗A(x, y)ej(am x+bny) şeklinde yazılabilir. Bu ifadenin
ikinci dereceden kısmi türevleri alınırsa;
∂2 Ax
∂x2
∂2 Ay
∂x ∂y
= j2 am 2 Ax = −am 2 Ax (am , bn )
(2.34)
= jam jbn Ay = −am bn Ay (am , bn )
(2.35)
eşitlikleri elde edilir.
Burada “m” ve “n” kare tipindeki yama sayısına bağlı olarak değişen indisleri
göstermektedir. Eşitliklerdeki am ve bn ise yama sayısına bağlı olarak değişen uzaysal
frekanslardır ve
am = a0 +
2π
bn = b0 +
2π
a
b
m
(2.36)
n
(2.37)
biçiminde ifade edilirler.
Matris formunda ifade edilen dalga denkleminde (Eş.(2.33)), manyetik vektör
potansiyelinin kısmı türevler ifadesini (Eş.(2.34 – 2.35)) yazılıp, denklemler düzenlenirse;
Ex (am, bn )
[
] = −jwμ [
Ey (am, bn )
1−
am 2
k2
−am bn
k2
−am bn
k2
]
bn 2
1−
k2
[
Ax(am ,bn )
]
Ay(am ,bn )
(2.38)
elde edilir.
Dalga denklemlerini matris formunda yazıp, elektrik alan ile manyetik vektör
potansiyelinin ifadesinden elde edilen denklem sistemine Eş.(2.38) Green fonksiyonu
uygulanırsa;
17
[
Ex (am, bn )
Ey (am, bn )
k2 −am
] = −jwμ [
2
k2
−am bn
k2
−am bn
k2
2
k2 −bn
k2
] G(am, bn ) [
Jx(am ,bn)
]
Jy(am ,bn)
(2.39)
eşitliği elde edilir.
Green fonksiyonunun çözümünden elde edilen denklemin Eş.(2.28) Fourier Dönüşümü
alınarak ifade edilirse;
G(am, bn ) =
−j
(2.40)
√k2 −am 2 −bn 2
denklemi elde edilir.
Matris formunda ifade edilen denklem sistemine (Eş.(2.39)), Green fonksiyonu
uygulanırsa en genel haliyle Eş. (2.41) ’deki ifadeyi elde ederiz.
[
Ex (am, bn )
Ey (am, bn )
]=
k2 −am
−
1
2wε
∑m,n
[
2
−am bn
√k2 −am 2 −bn 2
√k2 −am 2 −bn 2
−am bn
k2 −bn
√k2 −am 2 −bn 2
2
[
Jx(am,bn)
] ej(am x+bny)
Jy(am,bn)
(2.41)
√k2 −am 2 −bn 2 ]
2.4. Momentler Yöntemi
MoM elektromanyetik problemlerde özellikle integrallerde yaygın olarak kullanılan bir
ayrıklaştırma yöntemidir. Eş.(2.42)’de verilen K(x,x’) bilenen çekirdek fonksiyonu, g(x)
bilenen kaynak fonksiyonu ve f(x) bilinmeyen fonksiyonları göstermek üzere MoM bu tarz
denklemlere kolaylıkla uygulanabilir.
b
∫a f(x ′ )K(x, x ′ )dx ′ = g(x)
(2.42)
18
MoM’da, f(x) bilinmeyen fonksiyonu, an bilinmeyen katsayılar ve fn (x) bilinen baz
fonksiyonları göstermek üzere,
f(x) = ∑N
n=1 a n fn (x)
(2.43)
eşitliği ile ifade edilir.
“L” integral operatörü olmak üzere, MoM’un problemde verilen integrale uygulanmasıyla,
∑N
n=1 a n L{fn (x)} = g(x)
(2.44)
olarak genel çözüm denklemi elde edilir.
İntegral ifadesi belli bir hata altında hesaplanacağı için, MoM’da, “W(x)” hata fonksiyonu
W(x) = [∑N
n=1 a n L{fn (x)}] − g(x)
(2.45)
biçiminde verilir.
En genel haliyle MoM uygulanmasıyla elde edilen denklem sistemleri
[Zmn ][an ] = [Vm ]
(2.46)
[Zmn ] = ⟨Wn |Lfn ⟩
(2.47)
[Vm ] = ⟨Wm |g⟩
(2.48)
olarak ifade edilirler.
MoM’da hata ve baz fonksiyonlarının tanımlanmasında farklı tipte fonksiyonlar kullanılır.
Literatürde hata fonksiyonları olarak, Dirac Delta Fonksiyonları ve Galerkin Yöntemi
yaygın olarak kullanılır [27]. Galerkin yönteminde, hata fonksiyonu baz fonksiyonuna eşit
olarak seçilir. Baz fonksiyonlarının tanımlanmasında ise tam bölge veya alt bölge baz
fonksiyonları (Şekil 2.5.) kullanılır [27]. Problem tipi doğrusal veya düzgünse, problem
çözümünde tam bölge baz fonksiyonların kullanılması daha kolay ve hızlı sonuçlar
19
alınmasını sağlar. Farklı geometrideki yapılarda ise alt bölge baz fonksiyonların
kullanılması daha iyi sonuçlar verir.
Tam Bölge Baz Fonksiyonu
Problem Sınırları
Alt Bölge Baz Fonksiyonu
Problem Sınırları
Şekil 2.5. Tam bölge ve alt bölge baz fonksiyonları
2.5. Hata ve Baz Fonksiyonlarının Tanımlanması
Çalışmada, FSY problem tipi düzgün kare yamalardan oluştuğu için, problem çözümünde
tam bölge baz fonksiyonların kullanılması daha uygun olur. Çünkü problem tipi doğrusal
veya düzgün olan yapılarda,
problemin çözümünde tam bölge baz fonksiyonların
kullanılması daha iyi sonuçlar verir. Literatürde farklı tipte tam bölge baz fonksiyonları
kullanılmaktadır. En yaygın kullanılan tam bölge baz fonksiyonları sinüsoidal tipte tam
bölge baz fonksiyonlarıdır [28]. Eş.(2.49)’da literatürde yaygın olarak kullanılan bir
boyutta sinüsoidal tipte tam bölge baz fonksiyonuna örnek bir fonksiyon verilmiştir.
fn (x ′ ) = cos [
(2n−1)πx′
l
]
, −
l
2
≤ x′ ≤
l
2
(2.49)
Tam bölge baz fonksiyonu tanımlanması problem tipine ve çözüm yöntemine göre
değişiklik gösterir. MoM uygulanırken, birim alan başına akım yoğunluğunun, f(x)
bilinmeyen fonksiyonu formatında Eş.(2.43) tanımlanması gerekir. Çalışmada FSY‘de kare
tipi yama elemanlardan oluşan bir tasarım tercih edildiği için J ile f(x) arasındaki ilişkiyi
iki boyutta yazmak yeterlidir [25].
20
TM
J(x, y) = ∑Ii=0 ∑Jj=0[Aij φTE
ij + Bij φij ]
(2.50)
Burada Aij ve Bij bilinmeyen katsayıları, φTE
ij enine elektrik (Transverse Electric - TE) ve
φTM
enine manyetik (Transverse Magnetic - TM) modları simgeler (Şekil 2.6.).
ij
Elektromanyetik dalgalar, dalga klavuzlarının ekseni boyunca yayılmaktadırlar. Yayılan
dalga, klavuz eksenine dik olarak yayılıyorsa ve eksen doğrultusunda herhangi bir elektrik
alan bileşeni yoksa, bu tür modlara TE modları denir. TE modunda manyetik alan
bileşenleri mevcuttur. Manyetik alanın bileşenleri eksen yönünde ve eksene dik olarak
yayılmaktadır. Eğer yayılan dalga, klavuz eksenine dik olarak yayılıyorsa ve eksen
doğrultusunda herhangi bir manyetik alan bileşeni yoksa bu tür modlara da TM modları
denir. TM modunda elektrik alan bileşenleri mevcuttur. Elektrik alanın bileşenleri eksen
yönünde ve eksene dik olarak yayılır. Enine elektromanyetik modunda (Transverse
Electro-Magnetic - TEM) ise hem elektrik alanının hem de manyetik alanın kılavuz ekseni
doğrultusunda herhangi bir bileşeni yoktur.
Ele
k
Ala trik
nı
Manyetik
Alanı
İle
rle
m
eY
ön
ü
Şekil 2.6. Enine dalgalar
TM
φTE
yatay ve dikey sinüsoidal tipte tam bölge baz fonksiyonları olmak üzere,
ij ve φij
sinüsoidal fonksiyonlar,
21
φTE
ij (x, y) =
iπ
iπx
jπy
jπ
iπx
jπy
jπy
jπ
iπx
jπy
[a′ sin ( a′ ) cos ( b′ ) ax + b′ cos ( a′ ) sin ( b′ ) ay ] ej(a0 x+b0y)
(2.51)
φTM
ij (x, y) =
iπ
iπx
[b′ sin ( a′ ) cos ( b′ ) ax − a′ cos ( a′ ) sin ( b′ ) ay ] ej(a0 x+b0y)
(2.52)
biçiminde ifade edilirler.
Hata fonksiyonlarını tanımlarken, hata fonksiyonunu baz fonksiyonuna eşit olarak seçen
Galerkin yöntemini kullanarak,
Wm = fn
(2.53)
[Zmn ] = ⟨fm |Lfn ⟩
(2.54)
[Vm ] = ⟨fm |g⟩
(2.55)
biçiminde denklem sistemi tanımlanır.
Hata ve baz fonksiyonlarının tanımlanmasından sonra MoM uygulayarak Zmn , an ve Vm
denklemleri (Eş.(2.47 – 2.48)) için Ax = b doğrusal denklem sistemi (Eş.(2.46)) elde
edilir. Galerkin yöntemini uygulayarak bütün verileri yerine konulursa Ax = b doğrusal
denklem sistemi en genel haliyle,
⟨f1 |Lf1 ⟩
⋮
[
⟨fm |Lf1⟩
⋯
⋱
⋯
⟨f1 |g⟩
⟨f1 |Lfn ⟩ a1
⋮
][ ⋮ ] = [ ⋮ ]
⟨fm |g⟩
⟨fm |Lfn ⟩ a𝑛
(2.56)
biçiminde elde edilir.
2.6. Doğrusal Denklem Sisteminin Çözümü
x1, x2, … xn bilinmeyen değerler olmak üzere,
a11 x1 + a12 x2 + ⋯ a1n xn = b1
a21 x1 + a22 x2 + ⋯ a2n xn = b2
……………………………….
am1 x1 + am2 x2 + ⋯ amn xn = bm
(2.57)
22
doğrusal denklem sistemleridir.
Bu doğrusal denklem sistemlerini matris formuna getirerek Ax = b formatında,
a11
A=[ ⋮
am1
⋯
⋱
⋯
a1n
⋮ ]
amn
(2.58)
b1
b=[ ⋮ ]
bm
(2.59)
x1
x=[⋮]
n
(2.60)
a11
[ ⋮
am1
⋯
⋱
⋯
a1n x1
b1
⋮ ][ ⋮ ] = [ ⋮ ]
amn xn
bm
(2.61)
yazmak mümkündür.
Ax = b doğrusal denklem sistemlerinin çözümü için doğrudan yöntemler ve sayısal
yöntemler kullanılır. Doğrudan yöntemler için ters matris, Cramer, Gauss eliminasyon,
Gauss Jordan, LU (Lower Upper) ayrıştırması ve QR ayrıştırması yöntemleri örnek
verilebilir. Sayısal yöntemler için ise Jakobi, Gauss Siedell, Eşlenik Gradyan gibi iteratif
yöntemler örnek olarak verilebilir.
Gauss Eliminasyon yönteminde verilen doğrusal denklem sistemi matris biçiminde
yazılarak, matris üzerinde çeşitli satır işlemleri yapılır. Satır işlemleri sonucunda çözüm
kümeleri hesaplanarak üst üçgen matris oluşturulur. Daha sonra geriye doğru yerine koyma
işlemi ile bütün “x” bilinmeyen katsayıları hesaplanarak Ax = b doğrusal denklem
sistemlerinin çözümü elde edilir.
LU ayrıştırmasında A matrisi A = L . U Eş.(2.62) verildiği gibi çarpanlarına ayrılır ve
A x = b doğrusal denklem sistemi ise Lc = b Eş.(2.63) ve Ux = c Eş.(2.64) şeklinde
ayrılarak yazılır. Daha sonra Lc = b eşitliği için ileriye doğru yerine koyma işlemi, Ux = c
eşitliği için geriye doğru yerine koyma işlemi yapılarak Ax = b doğrusal denklem
sistemlerinin çözümü elde edilir.
23
A11
[A21
A31
A12
A22
A32
A13
L11
A23 ] = [L21
L31
A33
L11
[L21
L31
0
L22
L32
b1
0 c1
c
0 ] [ 2 ] = [b 2 ]
L33 c3
b3
(2.63)
U11
[ 0
0
U12
U22
0
c1
U13 x1
U23 ] [x2 ] = [c2 ]
c3
U33 x3
(2.64)
0
L22
L32
0 U11
0 ][ 0
L33 0
U12
U22
0
U13
U23 ]
U33
(2.62)
QR ayrıştırmasında Q; ortagonal matris Eş.(2.65) ve R; üst üçgen matris Eş.(2.66) olmak
üzere A matrisi A = Q . R Eş.(2.67) şeklinde çarpanlarına ayrılarak yazılır. Ortagonal
matrisler, matrisin kendisi (Q) ile transpozunun (QT) çarpımının birim matrise (I) eşit olan
Eş.(2.68) matrisleridir. Daha sonra LU yönteminde olduğu gibi d = 𝑄 𝑇 𝑏 Eş.(2.69)
eşitliğindeki d vektörü için çözüm elde edilir. Ardından Rx = d Eş.(2.70) eşitliği için
geriye doğru yerine koyma işlemi yapılarak Ax = b doğrusal denklem sistemlerinin
çözümü QR ayrıştırması yöntemiyle elde edilir.
Q11
[Q21
Q31
Q12
Q22
Q32
Q13 Q11
Q23 ] [Q12
Q33 Q13
R11
[ 0
0
R12
R 22
0
R13
R 23 ]
R 33
A11
A
[ 21
A31
A12
A22
A32
A13
Q11
A23 ] = [Q21
A33
Q31
Q21
Q22
Q23
R11
[ 0
0
R12
R 22
0
0
0]
1
(2.65)
(2.66)
Q12
Q22
Q32
[Q][Q]𝑇 = [I]
d1
Q11
[d2 ] = [Q21
Q31
d3
Q31
1 0
Q32 ] = [0 1
Q33
0 0
Q13 R11
Q23 ] [ 0
Q33 0
R12
R 22
0
R13
R 23 ]
R 33
(2.67)
(2.68)
Q12
Q22
Q32
Q13 𝑇 b1
Q23 ] [b2 ]
Q33
b3
R13 x1
d1
x
R 23 ] [ 2 ] = [d2 ]
R 33 x3
d3
(2.69)
(2.70)
24
2.7. Uygun Çözücünün Seçilmesi
Tez kapsamında, verilen doğrusal denklem sistemlerinin çözümü için doğrudan
yöntemlerden Gauss eliminasyon, LU ayrıştırması ve QR ayrıştırması yöntemleri farklı
matris boyutları için ayrı ayrı test edilerek en hızlı çözümü sağlayan yöntem seçilmiştir. Bu
nedenle Gauss eliminasyon, LU ayrıştırması ve QR ayrıştırması yöntemlerini farklı matris
boyutları için ayrı ayrı test edilmiş (Çizelge 2.1.) ve sonuçları grafiksel olarak Şekil 2.7.
‘de verilmiştir.
Çizelge 2.1. Gauss eliminasyon, LU ve QR ayrıştırma yöntemleri çözüm süreleri
“A”
Matrisi
Boyutu
“b”
Vektörü
Boyutu
Gauss
Eliminasyon
Yöntemi
süresi (sn)
LU
Ayrıştırma
Yöntemi
süresi (sn)
QR
Ayrıştırma
Yöntemi
süresi (sn)
500x500
1000x1000
1500x1500
2000x2000
2500x2500
3000x3000
3500x3500
4000x4000
4500x4500
5000x5000
500x1
1000x1
1500x1
2000x1
2500x1
3000x1
3500x1
4000x1
4500x1
5000x1
0,0074
0,0399
0,1125
0,2542
0,4189
0,6528
0,9420
1,3743
1,8947
2,7019
0,0117
0,1105
0,2328
0,3087
1,2926
2,2192
2,8516
4,2278
5,2103
7,8787
0,0363
0,3312
0,9079
2,0808
3,3882
5,5797
9,3603
12,5497
16,9602
23,2206
25
Gauss eliminasyon, LU ve QR yöntemleriyle
"Ax=b" Denklemi Çözüm Süreleri
00.040
00.035
Süre (saniye)
00.030
00.025
00.020
QR
00.015
LU
Gauss
00.010
00.005
00.000
Eleman Sayısı
Şekil 2.7. Gauss eliminasyon, LU ve QR ayrıştırma yöntemleri çözüm süreleri grafiği
Şekil 2.7. ‘de görüldüğü üzere Gauss eliminasyon yöntemi, LU ayrıştırma ve QR
ayrıştırma yöntemlerine daha hızlı sonuçlar vermiştir. Bu sebeple çalışmada verilen
doğrusal denklem sistemini çözmek için Gauss eliminasyon yöntemi kullanılmıştır.
Matrislerde iki denklemin yerini değiştirmek, bir denklemi sıfırdan farklı bir sayı ile
çarpmak veya bir denklemi bir sabitle çarpıp başka bir denklemle toplamak denklem
sistemine denk olan başka bir denklem sistemini oluşturur. Gauss eliminasyon yönteminde
verilen doğrusal denklem sistemi matris biçiminde yazılarak, çeşitli satır işlemleri
yapılmıştır. İşlemler sonucunda çözüm kümeleri hesaplanarak üst üçgen matris (örnek bir
üst üçgen matris Eş.2.71’de) oluşturulmuştur. Daha sonra geriye doğru yerine koyma
işlemi ile bütün “x” bilinmeyen katsayıları hesaplanarak çözüm elde edilmiştir.
A11
[ 0
0
A12
A22
0
A13
A21 ]
A33
(2.71)
26
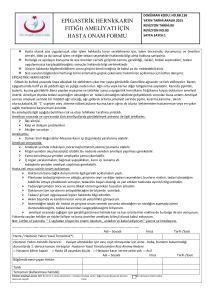
2.8. Denklem Sisteminin GPU ve CPU Üzerinde Uygulanması
CPU seri akışları yürütebilmek için tüm komutları tek tek işleyen birimlerdir. GPU paralel
akışları yürütebilmek için tüm komutları aynı anda işleyen birimlerdir. CPU, seri işlemleri
yürütebilmek için birkaç çekirdekten oluşan seri işlemcilerdir. Karmaşık yazılımlar
gerektirmesi nedeniyle CPU’nun bir arada programlanması zordur. GPU ise paralel
işlemleri yürütebilmek için binlerce çekirdekten oluşan paralel çalışmaya uygun
işlemcilerdir (Şekil 2.8.). GPU‘nun uygun yapıları ve genel kullanıma açık yazılımları
sayesinde, paralel olarak programları daha kolay ve etkili olarak uygular.
GPU
CPU
Kontrol
Aritmetik
Lojik
Birimler
Cache Bellek
D- RAM
D- RAM
Şekil 2.8. CPU ve GPU mimarisi
MoM’un uygulanmasıyla elde edilen Ax = b doğrusal denklem sistemlerinin çözümü CPU
ve GPU üzerinde farklı matris boyutları için ayrı ayrı uygulanarak performans analizi
yapılmıştır.
Çalışmada
tasarladığımız
FSY’nin
yazılımı
Matlab
platformunda
geliştirilmiştir. CPU ve GPU uygulamaları için, ilk olarak Ax = b doğrusal denklem
sistemlerinin CPU üzerindeki çözümleri yapılmıştır. Bu amaçla Gauss Eliminasyon
yöntemi CPU üzerinde uyarlanarak kod yazılmış, sonrasında GPU çözümü için Matlab
Paralel Hesaplama Aracı (Parallel Computing Toolbox) [29] kullanılmıştır. Bu araçla,
GPU üzerinde Ax = b doğrusal denklem sistemlerinin çözümü için Gauss Eliminasyon
yöntemi kodu yazılmıştır.
27
Matlab paralel hesaplama aracı, çok çekirdekli işlemcileri, GPU ve bilgisayar kümelerini
kullanarak özellikle matris vektör çarpımı işlemlerini optimize edecek şekilde tasarlanmış
bir araçtır. Bu araçla çalışacak uygulamaların çok çekirdekli yapılar üzerinde eşzamanlı
koşturulması sağlanır. Bunun için Matlab‘da geliştirilmiş, döngü işlemleri için “parfor”
komut seti vardır. “parfor” komut seti ile döngülerin paralelleştirilerek daha hızlı ve
verimli çalışmaları sağlanır (Şekil 2.9.).
Şekil 2.9. Matlab parfor komut seti işleyişi
Simülasyonda “parfor” komut setinin etkinliğini gözlemleyebilmek için, CPU üzerinde
“for döngüsü” ve GPU üzerinde “parfor döngüsü” kullanılarak matris işlemlerinin seri ve
paralel çalıştırılması uygulaması yapılmıştır (Çizelge 2.2.). Şekil 2.10. ‘da sonuçlar
grafiksel olarak gösterilmiştir.
28
Çizelge 2.2. CPU ve GPU üzerinde “for” ve “parfor” döngü süreleri
İterasyon
Sayısı
100
150
200
250
300
350
400
450
500
550
600
650
700
750
800
850
900
950
1000
CPU
“for”
Döngü
Süresi (sn)
0,7671
1,0155
1,3390
1,8291
2,1988
2,4912
2,7945
3,3056
3,3154
3,6756
3,9294
4,6058
4,4942
4,9423
5,7913
5,8576
6,3107
6,3993
7,1644
GPU
“parfor”
Döngü
Süresi (sn)
0,4592
0,5454
0,6064
0,7404
0,7473
0,9495
0,9595
1,0331
1,1436
1,2280
1,2377
1,4964
1,4974
1,5172
1,7053
1,8143
1,9396
1,9467
2,1736
29
CPU ve GPU üzerinde for ve parfor döngü süreleri
00.010
00.009
00.008
Süre (saniye)
00.007
00.006
00.005
CPU_for
00.004
GPU_parfor
00.003
00.002
00.001
100
150
200
250
300
350
400
450
500
550
600
650
700
750
800
850
900
950
1000
00.000
İterasyon Sayısı
Şekil 2.10. CPU ve GPU üzerinde “for” ve “parfor” döngü süreleri grafiği
Şekil 2.10. ‘da görüldüğü üzere, GPU üzerinde paralel olarak çalışan “parfor” döngü
komut seti, CPU üzerinde seri olarak çalışan “for” döngü komut setine göre oldukça hızlı
sonuçlar vermiştir. İterasyon sayısına bağlı olarak, GPU ile CPU arasındaki hız farkı başta
az olmasına rağmen, iterasyon sayısı arttıkça GPU ile CPU arasındaki hız farkı da
artmaktadır. Sonuç olarak GPU, CPU‘ya göre daha verimli ve hızlı çözümler
sağlamaktadır.
Matlab‘da GPU üzerinde işlemler yapabilmek için “gpuArray” fonksiyonu kullanılır.
“gpuArray” fonksiyonu ile verilerin GPU üzerine aktarılarak, GPU üzerinde işlemlerin
gerçekleştirilmesi sağlanır. “gpuArray” fonksiyonu CPU üzerinde yapılabilen, matris
bölme, çarpma, toplam, çıkarma, ters alma, determinant bulma, rank alma, traspoz alma,
eşlenik alma vb. birçok işlemin GPU üzerinde de yapılabilmesini [30] destekler.
“gpuArray” fonksiyonu, tanımları GPU üzerinde otomatik olarak yaparak işlemlerin
30
gerçekleştirilmesini sağlar. Kaynaklar [31-32] ‘de “gpuArray” fonksiyonu kullanımına ait
örnekler mevcuttur.
Bu tez kapsamında “gpuArray” fonksiyonları ve “parfor” döngüleri kullanılarak Ax = b
doğrusal denklem sistemlerinin çözümü Gauss eliminasyon yöntemi kullanılarak farklı
matris boyutları için GPU üzerinde gerçekleştirilmiştir.
31
3. SİSTEM TASARIMI VE ANALİZ SONUÇLARI
Kalkanlama, istenmeyen elektromanyetik dalgaların olumsuz etkilerinin azaltılması amacı
ile yapılan elektromanyetik durdurma işlemidir. Kalkanlama, kaçak veya istenmeyen
alanların azaltılması amacıyla kullanılmaktadır. Kalkanlama etkinliği (shielding efficiency
SE) desibel (dB) olarak,
Kalkanlama EtkinliğidB = 20 log10
EGelen
Eİlerleyen
(3.1)
biçiminde ifade edilir.
FSY yapılarının kalkanlama etkinlikleri, FSY‘yi oluşturan elemanların tiplerine, FSY ve
yamaların boyutlarına, gelen dalganın açısına ve polarizasyonuna bağlı olarak değişir.
Özellikle FSY‘yi oluşturan elemanların tipleri FSY tasarımında önemli rol oynar. Çünkü
her eleman tipinin kendisine has özellikleri bulunur. Bu bakımdan FSY tasarımı yapılırken
problem tipine göre eleman tipi seçilmesi oldukça önemlidir.
Çalışmada tasarlanan FSY‘nin 5 GHz ‘de kararlı bir bant durduran filtre yapısında olması
istenmektedir. Bu nedenle kare tipinde yama elemanların, elektromanyetik dalganın geliş
açısındaki değişimlere göre daha kararlı bir filtre yapısında olmaları nedeniyle dolayı FSY
tasarımında kare tipinde yama elemanlar kullanılmıştır.
3.1. FSY ve Yama Boyutlarının Belirlenmesi
FSY eleman tipini belirledikten sonra 5 GHz ‘de bant durduran filtre tasarlayabilmek için
FSY ve yamaların boyutlarını belirlemek gerekmektedir. Bu amaçla farklı FSY ve yama
boyutları için (Şekil 2.3.) testler yapılmış (Şekil 3.1. – 3.9.) ve en uygun FSY, yama
uzunlukları belirlenmiştir.
32
Şekil 3.1. FSY uzunluğu: 10 mm, yama uzunluğu: 1 mm için kalkanlama etkinliği
Şekil 3.2. FSY uzunluğu: 20 mm, yama uzunluğu: 1 mm için kalkanlama etkinliği
33
Şekil 3.3. FSY uzunluğu: 30 mm, yama uzunluğu: 1 mm için kalkanlama etkinliği
Şekil 3.4. FSY uzunluğu: 40 mm, yama uzunluğu: 1 mm için kalkanlama etkinliği
34
Şekil 3.5. FSY uzunluğu: 50 mm, yama uzunluğu: 1 mm için kalkanlama etkinliği
Şekil 3.6. FSY uzunluğu: 50 mm, yama uzunluğu:10 mm için kalkanlama etkinliği
35
Şekil 3.7. FSY uzunluğu: 50 mm, yama uzunluğu:20 mm için kalkanlama etkinliği
Şekil 3.8. FSY uzunluğu: 50 mm, yama uzunluğu:30 mm için kalkanlama etkinliği
36
Şekil 3.9. FSY uzunluğu: 50 mm, yama uzunluğu:40 mm için kalkanlama etkinliği
Şekil 3.1. - 3.9. ‘da görüldüğü üzere, FSY uzunluklarının 50 mm‘den farklı seçildiği
durumlarda
dalgaların
5
GHz’den
farklı
frekans
değerlerinde
kalkanlandığı
gözlemlenmiştir. FSY uzunluğu 50 mm için, yama uzunluğu 20 mm ve 40 mm olan
tasarımlarda kalkanlama etkinliği 5 GHz’de 33 dB, yama uzunluğu 1 mm ve 10 mm olan
tasarımlarda ise 23 dB seviyesinde kalmıştır. FSY uzunluğu 50 mm ve yama uzunluğu 30
mm olan tasarımda 5 GHz’de en iyi kalkanlama etkinliği elde edilmiştir.
3.2. Gelen Dalga Açılarına ve Polarizasyonuna Göre Testler Yapılması
FSY uzunluğu 50 mm ve yama uzunluğu 30 mm olarak belirlendikten sonra, tasarlanan
FSY yapılarının kalkanlama etkinliklerinin gelen dalganın açısına (θ ve φ) ve
polarizasyonuna (yatay veya dikey) bağlı olarak nasıl değiştiği, farklı açı değerleri ve
polarizasyon durumlarına göre de test edilmiştir. Test sonuçları Şekil 3.10. – 3.21. ‘de
verilmiştir.
37
Şekil 3.10. Yatay polarizasyonda 𝜃 = 0° için kalkanlama etkinliği
Şekil 3.11. Yatay polarizasyonda 𝜃 = 30° için kalkanlama etkinliği
38
Şekil 3.12. Yatay polarizasyonda 𝜃 = 60° için kalkanlama etkinliği
Şekil 3.13. Dikey polarizasyonda 𝜃 = 0° için kalkanlama etkinliği
39
Şekil 3.14. Dikey polarizasyonda 𝜃 = 30° için kalkanlama etkinliği
Şekil 3.15. Dikey polarizasyonda 𝜃 = 60° için kalkanlama etkinliği
40
Şekil 3.16. Yatay polarizasyonda 𝜑 = 0° için kalkanlama etkinliği
Şekil 3.17. Yatay polarizasyonda 𝜑 = 30° için kalkanlama etkinliği
41
Şekil 3.18. Yatay polarizasyonda 𝜑 = 60° için kalkanlama etkinliği
Şekil 3.19. Dikey polarizasyonda 𝜑 = 0° için kalkanlama etkinliği
42
Şekil 3.20. Dikey polarizasyonda 𝜑 = 30° için kalkanlama etkinliği
Şekil 3.21. Dikey polarizasyonda 𝜑 = 60° için kalkanlama etkinliği
43
Şekil 3.10. – 3.21. ‘de görüldüğü üzere FSY‘de kullanılan kare tipinde yama elemanlar,
değişen dalga açılarına (θ ve φ) ve polarizasyonuna (yatay veya dikey), kararlı bir bant
durduran filtre yapısında cevap vermektedir. Bu da kare tipinde yama elemanların FSY
tasarımda başarılı sonuçlar verdiğini göstermektedir.
Bu çalışmada, ayrıca kare tipinde yama elemanlar kullanarak tasarlanan FSY yapılarında,
farklı yama sayıları ve uzunlukları kullanılarak (Şekil 3.22.) farklı geliş açıları için,
kalkanlama etkinliklerinin nasıl değiştiği test edilmiştir. Test sonuçları Şekil 3.23. – 3.30.
‘da verilmiştir.
FSY:50 mm, Yama:30 mm
1 adet kare yama
FSY:50 mm, Yama:7 mm
9 adet kare yama
FSY:50 mm, Yama:10 mm
4 adet kare yama
FSY:50 mm, Yama:5 mm
16 adet kare yama
Şekil 3.22. Farklı kare yama sayıları kullanarak FSY tasarımı
44
Şekil 3.23. FSY:50 mm, Yama:30 mm için dikey polarizasyonda 𝜃 = 0° ve 1 adet kare
yama için kalkanlama etkinliği
Şekil 3.24. FSY:50 mm, Yama:10 mm için dikey polarizasyonda 𝜃 = 0° ve 4 adet kare
yama için kalkanlama etkinliği
45
Şekil 3.25. FSY:50 mm, Yama:7 mm için dikey polarizasyonda 𝜃 = 0° ve 9 adet kare
yama için kalkanlama etkinliği
Şekil 3.26. FSY:50 mm, Yama:5 mm için dikey polarizasyonda 𝜃 = 0° ve 16 adet kare
yama için kalkanlama etkinliği
46
Şekil 3.27. FSY:50 mm, Yama:30 mm için dikey polarizasyonda 𝜃 = 30° ve 1 adet kare
yama için kalkanlama etkinliği
Şekil 3.28. FSY:50 mm, Yama:10 mm için dikey polarizasyonda 𝜃 = 30° ve 4 adet kare
yama için kalkanlama etkinliği
47
Şekil 3.29. FSY:50 mm, Yama:7 mm için dikey polarizasyonda 𝜃 = 30° ve 9 adet kare
yama için kalkanlama etkinliği
Şekil 3.30. FSY:50 mm, Yama:5 mm için dikey polarizasyonda 𝜃 = 30° ve 16 adet kare
yama için kalkanlama etkinliği
48
Şekil 3.23. – 3.30. ‘da görüldüğü üzere, FSY‘de kullanılan farklı sayıdaki kare tipinde
yama elemanlar için dikey polarizasyonda 𝜃 = 0° ve 𝜃 = 30° için en iyi kalkanlama
etkinliğini 1 adet kare yamanın kullanıldığı FSY tasarımı sağlamıştır. Yama sayısı arttıkça
ve açı değiştikçe 11 ile 12 GHz frekans arasında istenmeyen yayınımlar olduğu
gözlemlenmiştir. Hatta 9 adet kare yamanın kullanıldığı FSY tasarımında 11 GHz
frekansında 22 dB seviyesinde bir istenmeyen yayınım olduğu gözlemlenmiştir.
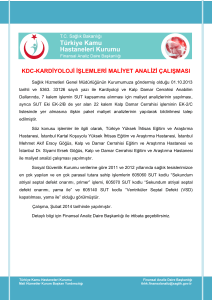
3.3. CPU ve GPU Testleri
MoM’un uygulanmasıyla elde edilen Ax = b doğrusal denklem sistemlerinin çözümünü
farklı boyutlardaki matrisler için Gauss eliminasyon yöntemiyle CPU ve GPU üzerinde
ayrı ayrı uygulanarak test edilmiş (Çizelge 3.1.) ve sonuçlar Şekil 3.31. ‘de verilmiştir.
GPU üzerinde uygulanırken Matlab Paralel Hesaplama Aracı kullanılarak çözümler
yapılmıştır.
Çizelge 3.1. Ax = b doğrusal denklem sisteminin CPU ve GPU üzerindeki çözüm süreleri
“A” Matrisi
Boyutu
“b” Vektörü
Boyutu
CPU Çözüm
Süresi (ms)
GPU Çözüm
Süresi (ms)
4x4
12x12
24x24
40x40
60x60
84x84
112x112
144x144
180x180
220x220
4x1
12x1
24x1
40x1
60x1
84x1
112x1
144x1
180x1
220x1
0,3800
0,3870
0,4531
0,5927
0,8027
1,0869
1,6719
2,8526
4,8914
6,2157
0,1046
0,1080
0,1102
0,1124
0,1372
0,1453
0,1488
0,1661
0,1855
0,1915
49
CPU ve GPU Üzerinde "Ax=b" Denklemi Çözüm Süreleri
07,000
06,000
Süre (milisaniye)
05,000
04,000
03,000
CPU
GPU
02,000
01,000
00,000
Eleman Sayısı
Şekil 3.31. Ax = b doğrusal denklem sisteminin CPU ve GPU üzerindeki çözüm süreleri
grafiği
Grafikten de görüldüğü üzere (Şekil 3.31.) GPU, CPU ‘ya göre çok daha hızlı (yaklaşık
3~40 kat) olarak doğrusal denklem sistemlerini çözmektedir.
50
51
4. SONUÇLAR VE ÖNERİLER
Bu tez çalışmasında FSY’nin ne olduğu, nerelerde kullanıldığı ve FSY ile yapılan
çalışmalar hakkında kısa bilgiler verildikten sonra FSY tasarım parametreleri
açıklanmıştır. Simülasyonda Green fonksiyonları ve MoM kullanılmıştır. 5 GHz frekans
bandında girişimin önlenmesi ve istemeyen dalgaların engellenmesi için, dalga
denklemleri yazılarak, saçılan dalgaların denklemleri vektör potansiyellere göre ifade
edilmiştir. İndüklenen akım ile bu akımın FSY içinde bulunduğu ortamdaki herhangi bir
noktada meydana getirdiği manyetik vektör potansiyeli arasındaki bağlantı Green
fonksiyonları ile gösterilmiş ve MoM uygulanarak elde edilen doğrusal denklemler
çözülmüştür. Akım yoğunluklarından elde edilen gelen ve ilerleyen elektrik alanlarının
ifadelerine bağlı olarak FSY‘nin kalkanlama etkinlikleri incelenerek bir bant durduran
FSY tasarımı gerçekleştirilmiştir. Bu tasarım kare tipi yama elemanlar tercih edilerek
gerçekleştirilmiştir. Tasarımda, farklı 𝜃 ve 𝜑 açıları ile yatay veya dikey polarizasyonlu
dalgalar kullanılmıştır. Ayrıca doğrusal denklem sistemlerinin çözümleri CPU ve GPU’da
ayrı ayrı yapılarak, CPU ve GPU’nun çözüm hızları karşılaştırılmıştır.
Tasarımın, yatay polarizasyonda 𝜃 = 0° ve 𝜑 = 0° için 5 GHz frekansında en iyi
kalkanlama etkinliğine sahip olduğu gözlemlenmiştir. Yatay polarizasyonda 𝜃 açısı
artırıldığında özellikle 9 ile 12 GHz frekans aralığında istenmeyen yayınımların oluştuğu,
𝜃 = 60° olduğu zaman 10 GHz frekansında yaklaşık 19 dB’lik bir istenmeyen yayınım
olduğu gözlemlenmiştir. Ayrıca 𝜃 açısı attıkça 5 GHz bandında yayılma olduğu da
gözlemlenmiştir. Kalkanlama eşiği olarak ortalama 20 dB‘lik değer kabul edilirse, kare tipi
yama elemanların yatay polarizasyonda 5 GHz frekansında, değişen 𝜃 açılarına göre
kararlı bir filtre yapısında cevap verdiği söylenebilir.
FSY‘nin dikey polarizasyonda da 𝜃 = 0° ve 𝜑 = 0° için 5 GHz frekansında çok iyi bir
kalkanlama etkinliğine sahip olduğu gözlemlenmiştir. Dikey polarizasyonda 𝜃 açısı
artırıldığında FSY‘nin kalkanlama etkinliğinin daha kararlı yapıda cevap verdiği
görülmüştür. Sadece
𝜃 = 60° olduğu zaman 5 GHz bandında önemsenmeyecek
büyüklükte bir yayılma olduğu gözlemlenmiştir. FSY‘nin dikey polarizasyonda, 5 GHz
frekansında, değişen 𝜃 açılarına göre kararlı bir filtre yapısında cevap verdiği görülmüştür.
52
Yatay polarizasyonda ise 𝜑 açısını arıttırıldığında, özellikle 8 ile 9 GHz frekans aralığında
yaklaşık 16 dB’lik bir istenmeyen yayınım olduğu gözlemlenmiştir. Ayrıca 𝜃 açısının
aksine, 𝜑 açısını arıttırıldığında 5 GHz bandında herhangi bir yayılma olmadığı
gözlemlenmiştir. FSY‘nin, yatay polarizasyonda 5 GHz frekansında, değişen 𝜑 açılarına
göre kararlı bir filtre yapısında olduğu görülmüştür.
Dikey polarizasyonda 𝜑 açısını arıttırıldığında, FSY‘nin kalkanlama etkinliği kararlı bir
yapıda cevap vermektedir. Sadece 𝜑 = 60° olduğu zaman 9 GHz frekansında yaklaşık 19
dB’lik bir istenmeyen yayınım olduğu gözlemlenmiştir. Kalkanlama eşiği olarak ortalama
20 dB‘lik değer kabul edilirse, kare tipi yama elemanların dikey polarizasyonda da 5 GHz
frekansında, değişen 𝜑 açılarına göre kararlı bir filtre yapısında cevap verdiği söylenebilir.
Çalışmada ayrıca, FSY tasarımı farklı sayıdaki kare yama elemanlar için de test edilmiştir.
Dikey polarizasyonda 𝜃 = 0° ve 𝜑 = 0° için 1, 4, 9 ve 16 adet kare yamalardan oluşan 4
farklı tasarımın 5 GHz frekansında kararlı bir filtre yapısında cevap verdiği söylenebilir.
Ayrıca istenmeyen yayınımlar da 5 dB‘nin altında kalmıştır. Bu değer tasarımın başarılı bir
filtre yapısında olduğunu ifade etmektedir. Dikey polarizasyonda 𝜃 = 30° için en iyi
kalkanlama etkinliğini 1 adet kare yamanın kullanıldığı FSY tasarımı sağlamıştır. Yama
sayısı arttıkça 11 ile 12 GHz frekans arasında istenmeyen yayınımlar olduğu
gözlemlenmiştir. Hatta 9 adet kare yamanın kullanıldığı FSY tasarımında 11 GHz
frekansında yaklaşık 22 dB’lik bir istenmeyen yayınım olduğu gözlemlenmiştir. Bu durum,
FSY‘nin 5 GHz frekansının yanı sıra 11 GHz frekansını da kalkanladığını göstermektedir
ve istenmeyen bir durumdur.
FSY tasarımında ortamın parametreleri, FSY’nin geometrisi, periyodu, eleman tipi, diziler
arası mesafe, gelen dalganın açısı ve polarizasyonu vb. faktörler FSY’nin hangi frekanstaki
dalgaları geçireceğini ve hangi frekanstaki dalgaları durduracağını belirlemektedir. Bu
nedenle istenmeyen yayılımları engelleyebilmek için tasarımın problem tipine ve istenilen
parametrelere göre çok dikkatli olarak yapılması gerekmektedir.
Filtre cevabının ve kalkanlama etkinliğinin kararlı olması nedeniyle, FSY tasarımda kare
tipi yama elemanlar tercih edilmiştir. Ayrıca kare tipi yama elemanlar, elektromanyetik
53
dalgaların geliş açılarındaki değişimlere ve polarizasyonlarına daha düzgün cevaplar
vermişlerdir.
Ax = b doğrusal denklem sistemlerinin çözümünde, CPU ve GPU ayrı ayrı test edilmiştir.
Örneğin, 220 x 220 boyutundaki bir “A” matrisi ve 220 x 1 boyutundaki bir “b”
vektörünün 220 x 1 boyutundaki “x” vektör çözümü GPU üzerinde yaklaşık 0.19 ms’de
gerçekleştirilirken, aynı yöntem kullanılarak “x” vektör çözümü CPU üzerinde yaklaşık
6.22 ms’de gerçekleştirilmiştir. Bu sonuç GPU çözümünün CPU çözümüne göre yaklaşık
33 katlık bir hız artışı sağladığını göstermektedir.
GPU sistemin hızını arttırarak CPU‘ya göre daha etkin çözümler sağlamıştır. Bu tip
problemlerde GPU‘ların kullanılması, hesaplamaların daha hızlı yapabilmelerini
sağlamaktadır. GPU kullanımı sayesinde saatlerce hatta günlerce sürebilecek hesaplamalar
kısa sürelerde yapılabilecektir.
54
55
KAYNAKLAR
1. Maxwell, J. C. (1865). A Dynamical Theory of the Electromagnetic Field.(155).
London/England: Phil. Trans. R. Soc. London, 459.
2. Maini, A. K. Agrawal, V. (2011). Satellite Technology: Principles and Applications.
New York City/United States: John Wiley & Sons, 694.
3. Capolino, F. (2009). Applications of Metamaterials. London/England: CRC Press, 762.
4. Shen, Z. (2007). Millimeter Wave Imaging Technologies for Plasma Diagnostics on
Superconducting Tokomak Machines. Michigan/United States: ProQuest, 197.
5. Elbert, B. R. (2004). The Satellite Communication Applications Handbook.
London/England:Artech House, 551.
6. Balanis, C. A. (2011). Modern Antenna Handbook. New York City/United States:
John Wiley & Sons, 1074.
7. Wu, T. K. (1995). Frequency Selective Surface and Grid Array. New York
City/United States: Wiley, 331.
8. Subrt, L. Grace, D. and Pechac, P. (2010). Controlling the Short-Range Propagation
Environment Using Active Frequency Selective Surfaces. Radioengineering, 19(4),
610-617.
9. Hertl, I. Raida, Z. and Novacek, Z. (2006). Multireflector Antennas – Cascaded
Structures with Frequency Selective Surfaces. Radioengineering, 15(4), 80-83.
10. Gibson, W. C. (2007). The Method of Moments in Electromagnetics. London/England:
CRC Press, 288.
11. Kunz, K. S. and Luebbers, R. J. (1993). The Finite Difference Time Bölge Method for
Electromagnetics. London/England: CRC Press, 464.
12. Polycarpou, A. C. (2006). Introduction to the Finite Element Method in
Electromagnetics. California/United States: Morgan & Claypool Publishers, 115.
13. Mittra, R. Chan, C. H. and Cwik, T. (1988). Techniques for analyzing frequency
selective surfaces a review. IEEE, 76(12), 1593-1615.
14. Jha, K. R. and Singh, G. (2014). Terahertz Planar Antennas for Next Generation
Communication. London/England: Springer Science & Business Media, 228.
15. Celozzi, S. Araneo, R. and Lovat, G. (2008). Electromagnetic Shielding. New York
City/United States: John Wiley & Sons, 385.
56
16. Lanuzza, L. Monorchio, A. and Manara, G. (2002). Synthesis of High-Impedance
FSSs Using Genetic Algorithms. IEEE, 364-637.
17. Paulo, H. Silva, F. Lacaouth, P. Fontgalland, G. Campos, A. and Assunçao, A. (2007).
Design of Frequency Selective Surfaces Using a Novel MoM-ANN-GA Technique.
IEEE, 275-279.
18. Poulsen, S. (2003). Scattering From Frequency Selective Surfaces: An Efficient Set of
V-Dipole Basis Functions. IEEE, 540-548.
19. Bringuier, J. N. and Mittra, R. (2011). Efficient Analysis of Frequency Selective
Surfaces Using the Ewald Transform. IEEE, 2645-2648.
20. Zhuang, W. Fan, Z. H. Ding, D. Z. and Chen, R.S. (2008). An Efficient Technique for
Analysis of Frequency Selective Surface in Spectral Domain with RWG Basis
Functions. IEEE, 224-226.
21. Ma, X. Wan, G. B. and Wan, W. (2011). Efficient Analysis of FSS Using the MoMbased Maehly Approximation. IEEE, 21-24.
22. Weile, D. S. (2001). Analysis of Frequency Selective Surfaces Through the Blazing
Onset Using Rational Krylov Model-Order Reduction and Woodbury Singularity
Extraction. IEEE, 49(10), 1470-1478.
23. Mittra, R. (2013). Computational Electromagnetics: Recent Advances and Engineering
Applications. London/England: Springer Science & Business Media, 712
24. Akıncı, G. ve Yılmaz, A. E. (2013). CPU ve GPU Üzerinde Eşlenik Gradyan Yöntemi
İmplementasyonlarının Performanslarının Karşılaştırılması. 6. Mühendislik ve
Teknoloji Sempozyumu (MTS6), 259-262.
25. Munk, B. A. (2000). Frequency Selective Surfaces: Theory and Design. New York
City/United States: John Wiley & Sons.
26. Akira, I. (1991). Electromagnetic Wave Propagation, Radiation and Scattering. New
Jersey /United States: Prentice Hall.
27. Balanis, C. A. (1989). Advanced Engineering Electromagnetics. New York
City/United States: John Wiley & Sons, 670-743.
28. Attaei, Y. M. (2012). Current Distribution on Linear Thin Wire Antenna Application
of MOM and FMM, Yüksek Lisans Tezi, Eastern Mediterranean University Electrical
and Electronic Engineering, North Cyprus, 8-9.
29. Suh, J. W. Kim, Y. (2014). Accelerating MATLAB with GPU Computing: A Primer
with Examples. Waltham /United States: Elsevier Inc, 99.
30. Altman, Y. (2014). Accelerating MATLAB Performance: 1001 tips to speed up
MATLAB programs. London/England:CRC Press, 308.
57
31. Koranne, S. (2011). Handbook of Open Source Tools. Oregon/England: Springer
science and Business Media, 308.
32. Hwu, W. (2012). GPU Computing Gems Jade Edition. Waltham /United States:
Elsevier Inc, 380.
58
59
ÖZGEÇMİŞ
Kişisel Bilgiler
Soyadı, adı
: BAYRAKTAR, İfakat Merve
Uyruğu
: T.C.
Doğum tarihi ve yeri
: 23.03.1987, Ankara
Medeni hali
: Bekar
Telefon
: 0 (312) 311 22 65
e-mail
: Merve.Bayraktar@gtb.gov.tr
Eğitim
Derece
Eğitim Birimi
Mezuniyet tarihi
Yüksek lisans
Gazi Üniversitesi / Elk. Elt. Müh.
2015
Lisans
Gazi Üniversitesi / Elk. Elt. Müh.
2011
Lise
Aydınlıkevler Anadolu Lisesi
2005
İş Deneyimi
Yıl
Yer
Görev
2013-Halen
Gümrük ve Ticaret Bakanlığı
Denetmen Yardımcısı
Yabancı Dil
İngilizce
Yayınlar
Bayraktar, İ. M. ve Akçam, N. (2015). The Frequency Selective Surface Applications with
Parallel Programming. 2nd International Conference on Electrical and Electronics
Engineering (ICEEE).
Bayraktar, İ. M. ve Akçam, N. (2015). 5 GHz Frekans Bandında Bant Durduran Frekans
Seçici Yüzey Uygulaması. 8. Mühendislik ve Teknoloji Sempozyumu (MTS8).
Hobiler
Yüzme, voleybol oynamak, kitap okumak, film izlemek.
GAZİ GELECEKTİR...