T.C
KARADENİZ TEKNİK ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
CAM SAYDAMLIK KONTROLÜ
BİTİRME ÇALIŞMASI
180005 MEHMET BACANAK
180011 ABDULKADİR CENİK
TRABZON 2011
T.C
KARADENİZ TEKNİK ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
CAM SAYDAMLIK KONTROLÜ
BİTİRME ÇALIŞMASI
180005 MEHMET BACANAK
180011 ABDULKADİR CENİK
PROF. DR. SEFA AKPINAR
TRABZON 2011
ÖNSÖZ
Bizlere bu projenin yapımında baĢından sonuna kadar desteğini ve zamanını
esirgemeyen danıĢman hocamız Prof. Dr. Sefa AKPINAR’ a, projenin yapım süreci
boyunca yardımlarını aldığımız asistanlarımıza, bize çalıĢma ortamı sağlayan Karadeniz
Teknik Üniversitesi’ ne, beraber emek harcadığımız tüm arkadaĢlarımıza ve son olarak bu
günlere gelmemizde en çok emeği geçen ailelerimize teĢekkürlerimizi bir borç biliriz.
Mehmet BACANAK
Abdulkadir CENĠK
180005
180011
TRABZON 2011
II
İÇİNDEKİLER
ÖNSÖZ ................................................................................................................................... I
ĠÇĠNDEKĠLER ......................................................................................................................II
ÖZET ................................................................................................................................... IV
SEMBOLLER ...................................................................................................................... V
KISALTMALAR ................................................................................................................ VI
1. GĠRĠġ
1.1.CAM SAYDAMLIK KONTROLÜ .................................................................... 1
1.2.ÇALIġMA TAKVĠMĠ ......................................................................................... 3
2. MALZEMELERĠN TANITILMASI
2.1. DOĞRU AKIM MOTORU ................................................................................ 4
2.1.1. Doğru Akım Motorunun Yapısı ................................................................. 5
2.1.1.a. Stator .................................................................................................. 5
2.1.1.b. Rotor .................................................................................................. 6
2.1.1.c. Gövde ................................................................................................. 6
2.1.1.d. Yatak .................................................................................................. 7
2.1.1.e. Fırça-Kolektör Düzeneği ................................................................... 8
2.1.2. Fırçasız Doğru Akım Motorları ................................................................. 8
2.2. TAġIMA BANDI ............................................................................................... 9
2.3. CAMLAR ......................................................................................................... 10
2.4. STEP MOTOR.................................................................................................. 11
2.4.1. Step Motorun Sürülmesi .......................................................................... 12
2.5. DĠġLĠ ÇARK – PĠNYON SĠSTEMĠ ................................................................ 13
2.6. DC GÜÇ KAYNAĞI ........................................................................................ 14
2.7. KONTROL DEVRESĠ ..................................................................................... 15
2.7.1. Direnç ...................................................................................................... 15
2.7.2. Röle.......................................................................................................... 17
2.7.3. Transistör ................................................................................................. 18
2.7.4. LDR(Light Dependent Resistance) ......................................................... 19
2.7.5. Lazer ........................................................................................................ 20
2.7.6. Kristal Osilatör ........................................................................................ 21
2.7.7. Mercimek Kondansatör ........................................................................... 22
III
2.7.8. ULN2003 Entegresi ................................................................................. 23
2.7.9. PIC16F877 ............................................................................................... 23
3. PROJENĠN ÇALIġMA SÜRECĠ
3.1. BANT MOTORU VE BANDIN ÇALIġTIRILMASI ..................................... 25
3.2. LAZER – LDR DÜZENEĞĠ ............................................................................ 27
3.3. CAMI BANTTAN AYIRAN DÜZENEK ....................................................... 30
3.4. PIC16F877’ NĠN YAZILIMI VE AÇIKLAMASI ........................................... 31
4. DEĞERLENDĠRME VE SONUÇ
4.1. DEĞERLENDĠRME ........................................................................................ 36
4.2. SONUÇ ............................................................................................................. 36
KAYNAKLAR .................................................................................................................... 38
IV
ÖZET
Endüstriyel bir süreç olarak örnek verebileceğimiz “cam üretim sürecinin” bir aĢaması
olabilecek projemizde, üretilen camın kırılganlık ve sağlamlık testinden geçtikten sonra bir
de saydamlık testine tabii tutulması üzerine bir araĢtırma yaptık. Günlük hayatımızda bir
çok alanda kullanılan camların görüĢ netliği açısından temiz ve olabildiğince saydam
olması gerekir. Tabi ki baĢka amaçla üretilen diğer saydam olmayan camlar konumuz
dıĢındadır. Örneğin buzlu camlar, aynalı camlar gibi. Bizim konumuz dahilindeki camlar;
araç camları, bina camları, gökdelenlerin cephelerinde kaplı camlar olabilir. Ayrıca
bilimsel alanda gözlük camları, mikroskobik camlar, mercekler gibi görüĢün önemli
olduğu alanlarda da bu projenin detaylı ve geliĢtirilmiĢ halinden yararlanılabilir.
V
SEMBOLLER
İSİM
SEMBOL
BİRİM
Kuvvet
N
Newton
Manyetik Alan
T
Tesla
Akım
A
Amper
Gerilim
V
Volt
Direnç
Ω
Ohm
Uzunluk
m
Metre
Uzunluk
cm
Santimetre
Yarıçap
r
metre
Öz direnç
(rho)
Öz iletkenlik
(kapa)
Kapasite
F
Farad
Güç
W
Watt
Moment
Nm
Newton metre
Açısal Hız
ω
r/s
Kilo
k
Mega
M
Mili
m
Mikro
μ
Nano
n
Piko
p
VI
[radyan/saniye]
KISALTMALAR
ĠSĠM
LASER
KISALTMASI
Light Amplification by Stimulated Emission of Radiation
LDR
Light Dependent Resistance
PVC
Polivinil - Klorür
PLC
Programmable Logic Controller
FET
Field Effect Transistor
DC
Direct Current
AC
Alternating Current
IGBT
Insulated Gate Bipolar Transistor
PIC
Peripheral Interface Controller
CCS
Custom Computer Services
ppm
Parts Per Million
MOSFET
CD
DVD
Metal Oxide Semiconductor Field Effect Transistor
Compact Disc
Digital Versatile Disc
PROM
Programmable Read Only Memory
RAM
Random Access Memory
EEPROM
OTP
Electrically Erasable Programmable Read-Only Memory
One-Time Programmable
VII
1
BÖLÜM 1
GĠRĠġ
1.1. CAM SAYDAMLIK KONTROLÜ
Projenin adından da anlaşılacağı gibi camların saydamlık kontrolünü yapacak bir sistem
geliştirdik. Bu sistem; belirli ebatlarda kesilmiş dikdörtgen şeklinde camların saydamlığını
kontrol edecek, saydam olmayan camları ise ayıracaktır.
Endüstriyel üretim sürecinde sürekliliği sağlayan en önemli sistemlerden birisi olan
konveyör ( taşıma bandı ) sistemini projemizde kullanmak istedik. Kontrol edilecek
camları bir cam fabrikasında üretilen camlar olarak hayal edelim. Üretilen camlar çeşitli
aşamalardan geçecektir. Taşıma bandı, bu aşamaları hem hızlandıracak hem de üretim
sürecinin sürekliliğini sağlayacaktır. Biz de camların saydamlık kontrolünü geliştirmiş
olduğumuz lazer düzeneği ile camlar taşıma bandı üzerinde
hareket halinde iken
yapacağız. Eğer camlar istenilen seviyede saydam ise sistem hiç duraklamadan camları
taşıma bandı üzerinden taşımaya devam edecektir. Eğer camlardan her hangi birisinde
saydamlığı bozan bir durum olduğunda o cam, bir dişli çark-pinyon sistemin önünde
duracak ve cam banttan ayrılacaktır. Bu aşamadan sonra sistem çalışmasına devam
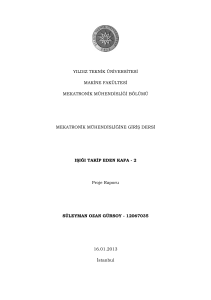
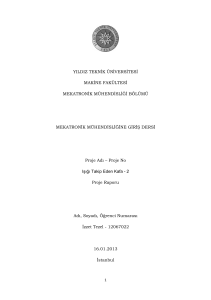
edecektir. Şekil 1.1.„ de bu sistemin düzeneği basit haliyle gösterilmiştir.
Şekil 1.1. Cam saydamlık kontrolü sisteminin basit gösterimi
2
Biraz daha detaylı bir şekilde ifade edecek olursak, bant hareket halinde iken, bant
doğrultusuna dik durumda camı kaplayacak şekilde üst üste binmiş lazer ışıkları camın
üzerine düşüreceğiz. Lazerlerin tam karşısında duran sıralı şekilde LDR (light dependent
resistance) dediğimiz foto dirençlerin üzerine düşen lazer ışınlarının değişimine göre bir
algılama devresi oluşturacağız.
Böylece, cam ilerlerken üzerinde bir leke veya saydamlığını bozacak bir durum
karşısında lazerden LDR‟ye ışık düşmeyecek ve direnci değişerek bir transistörün bazını
tetikleyeceğiz. Bu sayede devremizdeki durumun değişmesiyle lekeli camı tespit etmiş
olacağız. Tespit edilen cam, bantta ilerleyip belli bir mesafe sonra duracak ve bir step
motor yardımıyla bir dişli çark - pinyon üzerinden banttan çıkarılarak dışarı alınacaktır.
Sağlam olan camlarda ise LDR üzerine ışık sürekli düşeceğinden transistörde tetiklenme
olmayacak ve cam hiç durmadan taşıma bandının sonuna kadar devam etmiş olacaktır.
Tezimizde öncelikle sistemde kullandığımız malzemeleri ve devreleri tanıtacağız. Bu
malzemeler hakkında kısa bilgiler vereceğiz. Malzemelerin özellikleri ve ne amaçla
kullanıldıklarını açıklayacağız. Bundan sonraki aşamada ise sistemin çalışma prensibini bir
süreç şeklinde ele alacağız. Aşama aşama sistemin bölümlerinden bahsedip bu bölümlerde
kullandığımız elemanların özelliklerinden bahsedeceğiz. Ayrıca ilk bölümde anlattığımız
malzemeleri kendi sistemimize uydurmak için ne gibi değişiklikler yaptığımızı , ne şekilde
kullandığımızı, hangi durumlarda problemlerle karşılaştığımızı ve bu problemlere ne gibi
çözümler bulduğumuzu anlatacağız. Son olarak ise tasarlamış olduğumuz bu sistem
hakkındaki önerilerimizi ve değerlendirmelerimizi ele alacağız.
Projeye başlamadan önce olması gerektiği şekilde bir çalışma takvimi yaptık. Tablo
1.1.‟ de bu takvime göre yapacağımız işleri belirli zaman aralıklarında programlayarak tüm
işlemlerin planlı bir şekilde ilerlemesini sağlamaya çalıştık.
3
1.2. ÇALIġMA TAKVĠMĠ
Tablo 1.1. Çalışma Takvimi
Şubat 2011
Proje
Mart 2011
Nisan 20011
Mayıs 2011
Hakkında
Yorumlamalar
X
Tasarım
Araştırması
X
X
Simülasyon
Çalışmaları
X
X
Elektronik
Malzeme Temini
Board
X
Üzerinde
Denemeler
X
X
Fiziki Düzeneğin
Yapımı
X
Tez Yazılması
X
4
BÖLÜM 2
MALZEMELERĠN TANITILMASI
2.1. DOĞRU AKIM MOTORU
Doğru akım elektrik enerjisini mekanik enerjiye dönüştüren makinelere doğru akım
motorları denilmektedir. Bu motorlar stator kısmında oluşturulan sabit manyetik alanın
rotorda oluşan sabit manyetik alanı itmesi veya çekmesi prensibi doğrultusunda
çalışmaktadır. Bu prensibe göre manyetik alan etkisi altında bulunan bir iletkenin
içerisinden akım geçirildiğinde bu iletkene bir kuvvet etkimektedir. Bu prensip Lorentz
Yasası adını almaktadır. Bu yasanın matematiksel ifadesi (2.1) no ‟ lu formüldeki gibidir.
(2.1)
F: Kuvvet
[N] (Newton)
B: Manyetik alan
[T] (Tesla)
i: İletkenden akan akım [A] (Amper)
l: İletkenin uzunluğu
[m] (Metre)
Şekil 2.1. Manyetik alan etkisinde bulunan çerçeveye etkiyen kuvvet
5
Şekil 2.1.„de N ve S kutuplarından oluşturulmuş sabit bir manyetik alan etkisinde kalan
iletken çerçevenin içerisinden bir akım geçirildiğinde iletkene etkiyen kuvvetlerin yönleri
gösterilmiştir. Bu kuvvetler manyetik alana ve çerçeve içerisinden akan akıma dik yönde
etki etmektedir. Doğru motorlarında da bu kuvvetten yararlanılarak rotorun dönmesi
sağlanmaktadır.
2.1.1. Doğru Akım Motorunun Yapısı
Doğru akım motorları stator (sabit kısım), rotor (hareketli kısım), yatak, gövde, fırça ve
kolektörden oluşur. Bu kısımlar hakkında kısaca bilgi verelim.
2.1.1.a. Stator
Hareketli kısım olan rotoru çevreleyen ve gövdenin iç kısmına oturtulan birbirinden
yalıtılmış ince sac levhalardan oluşturulan yapıdır. Statorun görevi ana ve yardımcı
kutupları taşıma ve bu kutupların oluşturduğu manyetik akıya küçük dirençli yol
sağlamaktır. Uyarma sargısı adı verdiğimiz sargılar ana kutuplar üzerine yerleştirilmiştir.
Bu sargılar gerilim endüklenmesi için gerekli olan uyarma alanını meydana getirirler. Ana
kutupların rotora bakan uçları genellikle yarım ay şeklindedir. Uyarma sargıları motorlara
göre değişiklik arz etmektedir. Bu sargılar seri, şönt veya serbest olarak bağlanabilirler.
Statorda bulunan yardımcı kutuplar şekil ve görev olarak ana kutuplardan farklıdır. Bu
kutuplar endüvi reaksiyonunu azaltarak komütasyonu düzenlerler. Yardımcı kutuplar
endüvi sargısına seri ve ters kuplajlı olarak bağlanırlar. Şekil 2.2.„ de bir doğru akım
motorunun statoru gösterilmiştir.
Şekil 2.2. Statorun yapısı
6
2.1.1.b. Rotor
Birbirinden yalıtılmış ince sac levhalarının bir araya getirilmesi ile oluşturulan rotor
motorun hareketli kısmıdır. İnce sac levhalarının belirli şekiller verilerek oluşturulması
demir kayıplarını en aza indirmektir. Rotorlar miller üzerine yerleştirilir. Rotorun dönmesi
ile mil üzerinden mekanik enerji alınır. Alınan mekanik enerji iş makinelerine aktarılır.
Rotor saçlarına oluklar açılarak iletkenler yerleştirilir. Bu iletkenlerin sayısı motorun
büyüklüğüne veya yapısına göre değişir. Rotor sargısının enerjisi fırça kolektör düzeneği
veya kontrolör tarafından sağlanmaktadır. Rotorun çalışması ve sargılardan akım
geçmesinden dolayı oluşan ısıyı dışarı atmak için rotorun bir tarafına pervane eklenir.
Böylece motorun soğutulması sağlanmış olur. Sürtünme kayıplarını azaltmak için rotorun
yatakları rulman tipinde yapılır. Şekil 2.3.„ te rotorun yapısı gösterilmiştir.
Şekil 2.3. Rotor yapısı
2.1.1.c. Gövde
Mekanik dış etkilere karşı motoru koruma amacı ile yapılan genellikle dökme demirden
veya çelikten imal edilen kısımdır. Ayrıca statoru ve yataklar üzerinden rotoru
taşımaktadır. Çoğu zaman radyatör dilimlerine benzer çıkıntılı olarak yapılırlar. Bunun
nedeni dış ortama bakan yüzey alanını artırarak motorun daha çabuk soğumasını
sağlamaktır. Gövde üzerinde her motorun işaret plakası bulunmaktadır. Bu plakada
motorun nominal gücü, gerilimi, akımı ve bazı özellikleri verilir. Gövdedeki diğer önemli
bölüm terminal kutusudur. Bu kutuda motordaki sargıların uçları çıkartılır ve bu uçlar
standart biçimde belirtilir.
7
A-B: Rotor (endüvi) sargısı uçları
C-D: Şönt uyarma sargısı uçları
E-F: Seri uyarma sargısı uçları
G-H: Yardımcı kutup sargısı uçları
I-K: Serbest uyarma sargısı uçları
Şekil 2.4. Elektrik motor gövdesi
Şekil 2.4.„ te elektrik motorunun gövdesi ve motorun hızını düşüren redüktör sistemi
gösterilmiştir.
2.1.1.d. Yatak
Yataklar rotorun rahatça dönebilmesini, az kayıplı olmasını, ve gürültüsüz çalışmasını
sağlar. Yatakların sık sık bakımı yapılmalıdır. Bakım yapılmazsa yatakta oluşan
sürtünmeler komütasyonun bozulmasına neden olur. Ayrıca yatakta oluşabilecek en ufak
arıza rotorun dönüşünü etkilediğinden motorun veriminin oldukça düşmesine neden olur.
8
2.1.1.e. Fırça-Kollektör Düzeneği
Rotor sargılarının enerjilendirilmesi için fırça - kollektör düzeneklerinden faydalanılır.
Rotor sargılarının uçları belirli kurallara göre kolektör dilimleri üzerinden birbirlerine
bağlanırlar. Fırçalar kolektör dilimlerine temas ettirilir. Fırçalar genellikle grafitten
yapılırlar ve içerisine iletkenliği artırmak için bakır tozlar ilave edilir. Fırça ve kolektör
takımının kıvılcım olayından dolayı çabucak kirlenmesi bunların sık sık bakıma alınmasını
gerektirir. Bu da bu motorların tercih edilmemesine bir etken oluşturmaktadır. Bu sebepten
ötürü fırçasız doğru akım motorları geliştirilmiştir.
2.1.2. Fırçasız Doğru Akım Motorları
Fırçasız doğru akım motorlarında, rotor sargılarının enerjisini sağlamak için fırça ve
kolektör ikilisi yerine elektronik anahtarlar kullanılır. Komütasyon olayı bu elektronik
anahtarlar yardımı ile gerçekleştirilir. Bu sayede fırça kolektör ikilisinin neden olduğu
sürtünme ve kıvılcım sorunu ortadan kalkmış olmaktadır. Bu durumda motor daha yüksek
hızlara çıkabilmektedir. Ayrıca motorun hassas hız kontrolü de yapılabilmektedir. Şekil
2.5.‟ te fırçasız doğru akım motoru gösterilmiştir. Bu motorların verimleri oldukça
yüksektir, ömürleri uzundur. Fırçasız doğru akım motorları bu özelliklerinden ötürü daha
çok tercih edilirler. En önemli dezavantajı ise sensör ve iletken malzeme gerektirmesidir.
Sensörler oldukça pahalı elemanlar olduğundan motor maliyetini artırır.
Şekil 2.5. Fırçasız Doğru Akım Motoru
9
2.2. TAġIMA BANDI
Taşıma sistemlerinde döner hareketten yararlanılması yanında doğrusal hareket
edebilen sistemlere de ihtiyaç duyulur. Doğrusal hareket direkt olarak elde edilemez.
Bunun için döner hareket fonksiyonunu kullanarak doğrusal hareket edebilen sistemlerin
türetilmesi yoluna gidilmiştir. Taşıma bantları iki silindir makara ve bu makaralar üzerine
sarılmış banttan elde edilir. Bant silindir üzerinden kaydırılarak hareket ettirilir.
Makaralardan biri veya birçoğu enerjilendirilerek ileri veya geri yönde bant üzerindeki
nesneler taşınır. Enerjilendirilen makara sürücü makara, enerjisiz kalan makara ise ara
makara olarak isimlendirilir. Taşıma bantları 19. yy ‟ dan bu yana kullanılmaktadır.
Kömür, altın, cevher gibi ürünlerin taşıma zorluğundan dolayı bant sistemlerinde değişik
gelişimler olmuştur. Çeşitli firmalar taşıma sistemlerini dünyaya tanıtmışlardır. Bant
maddesi olarak çeşitli maddeler kullanılmıştır. Kauçuk, çelik, plastik, kağıt gibi
maddelerden taşıma bantları oluşturulmuştur.
Şekil 2.6. Taşıma bandı (http://www.atcimakina.com.tr/karton_koli_tasima_bandi.html)
Şekil 2.6. teki taşıma bandını örnek olarak açıklayalım. Bu taşıma bandı karton kolileri
taşımak maksadıyla üretilmiş olup gövdesi paslanmaz çelikten,
taşıyıcı konveyör ise
kabartılmış PVC‟ den imal edilmiştir. Taşınacak malzeme aynı yükseklikte bir noktadan
başka bir noktaya taşıyabilmektedir. Bunun yanında belli bir yükseklikten başka bir
yüksekliğe de ayarlanabilir yükseklik ayarıyla taşıma yapabilir. Tekerlekleri sayesinde
bandın
taşınması
kullanılabilmektedir.
kolaylaştırılmıştır.
Bandın
çalışma
yönü
her
iki
yönde
de
Bandın bu özellikleri bandı endüstriyel alanlarda son derece
kullanılabilir hale getirmiştir.
10
Taşıma bantları endüstride birçok alanda kullanılmaktadır. Fabrikalarda ürünleri bir
yerden başka bir yere götürme işlemlerinde taşıma bantları kullanılır. Cam şişe dolum ve
kapaklama işlemlerinde doldurulan veya kapaklanan ürünlerin, başlangıç noktalarından
son bulacakları kasa veya kutulama yapılacak ünitelere iletilmesi taşıma bantları ile
gerçekleştirilir. Taşıma bantlarının kullanım alanlarına daha çok örnek verecek olursak;
sigara paketleme işlemleri tamamlandıktan sonra onar adetlik kutularla bir bütün halinde
paketleme işlemlerinde, sağlık sektörlerinde ilaç paketleme işlemlerinde, havaalanlarında
yolcu valizlerinin tesliminde, maden ocaklarında, matbaa basım yerlerinde vb. birçok
yerde kullanılırlar. Bir diğer örnek otomobillerin üretilmesi aşamasında, araçların her bir
parçalarının montajları araç konveyör sistem üzerinde ilerlerken aşamalar halinde
yapılmaktadır. Bu üretimi son derece hızlandırmakta ve üretim yapan şirkete büyük bir
ekonomi sağlamaktadır. Bizim projemizde ise camların saydamlık kontrol süreci ile
saydam olan camlar ve saydam olmayan camların birbirinden ayırt edilerek işletilmesi
taşıma bandı hareket halinde iken sağlanacak, herhangi bir problem olmadığı müddetçe
bant durmadan bu süreç devam edecektir. Saydam olmayan bant tespit edilince bant
durdurularak sürecin dışına çıkarılacaktır.
2.3. CAMLAR
Camlar günlük hayatın her anında karşı karşıya olduğumuz cisimlerdir. Birçok alanda
camlardan faydalanmaktayız. Camları saydam olanlar ve saydam olmayanlar diye ayırt
edersek, saydam olan camlar için ışığı ve görüntüyü tam olarak geçirmesi beklenir. Bunun
için olabildiğince itinalı şekilde üretilmelidir. Yapmış olduğumuz projede camların
kontrolünü yapacak, saydam olup olmamasına sınıflandıracağız. Bunun için 8x6 cm
ebatlarında camlar kullanacağız. Bu camların bant üzerinde dik bir şekilde ilerlemesi için
de camları takozlara oturtacağız. Şekil 2.7.„ de projede kullandığımız camlar gösterilmiştir.
Şekil 2.7. Takoza oturtulmuş cam
11
2.4. STEP MOTOR
Step motorunun Türkçe karşılığı adım motorudur. Motora enerji verildiğinde milini
adım adım hareket ettirmektedir. Motorun tasarımına bağlı olarak bu adımlar belirli
derecelerde olabilir. Adım sayısı 360° lik bir turunu kaç adımda attığına bağlıdır. Motor
milinin hareketi ve konumunun hassas olarak yapılması gereken yerlerde sıklıkla kullanılır.
Saat yönünde veya tersi yönünde dönebilirler. Şekil 2.8.„ de adım motorunun şekli
gösterilmiştir. Adım motorunun davranışı onu besleyen güç kaynağına bağlıdır. Elde edilen
darbeler mikro işlemciler tarafından kontrol edilir. Bu sayede adım sayısı bilinmektedir.
Şekil 2.8. Step motor
Step motorlar 5 veya 6 uçlu olabilirler. Anahtarlar yardımı ile her bir sargı ayrı ayrı
enerjilendirilerek rotorun o sargı karşısına gelmesi sağlanabilir. Sargılara uygulanan
gerilimin polaritesi değiştirildiğinde devir yönü de değiştirilmiş olur. Dönme açıları step
motorlar için ayırt edici bir özelliktir. Daha düşük derece dönen adım motorları daha
hassas çalışma olanağı sunar. Dönme açıları stator ve rotor kutup sayısına bağlı olarak
değiştirilir. Sargılara enerji verilmediği sürece rotor konumunu korumaktadır.
12
Şekil 2.9. Step motorda sargıların durumu
Step motorun stator sargılarına Şekil 2.9.„ daki gibi anahtarlar yardımıyla sıralı biçimde
enerji verilir. Bunun amacı stator içerisinde döndürme etkisine sahip bir manyetik alan
oluşturmaktır. Buna durumda motorun içindeki hareketli kısım olan rotor, bobinlerin
sırayla oluşturmuş olduğu manyetik alanla polarize oluşturarak adım adım hareket
etmektedir.[1]
2.4.1.Step Motorun Sürülmesi
Step motorları çalıştırabilmek için çeşitli sürücü devrelere ihtiyaç duyulmaktadırlar. Bu
devreler bilgisayar, mikroişlemci ve PLC üniteleri ile kontrol edilmektedir. Bu sürücü
devrelere örnek verecek olursak npn transistörlü anahtarlama elemanları ile, ULN2003
entegresi ile, MOSFET güç transistörleri ile, UCN5804B entegre devresi ile, L297+L298
entegreli devrelerden sürücü devresi oluşturulabilir. Bu sürücü devrelerin birbirlerine göre
üstünlükleri bulunur. Npn transistörlü sürücü devresinde transistör bacaklarıyla
uğraşmaktansa, ULN2003 entegresi kullanmak bu sorunu ortadan kaldırmamıza yardımcı
olur. MOSFET transistörlü sürücü devresi oluşturmak, transistörlü devreye göre daha iyi
bir seçimdir. MOSFET‟ lerin anahtarlama hızları yüksektir ve giriş dirençleri oldukça
büyüktür. Bu özellik sayesinde kontrolör devrelerine direkt olarak bağlanabilirler.
UCN5804B entegresinde ise adım girişi, yarı adım girişi ve yön girişleri bulunur.
13
2.5.DĠġLĠ ÇARK - PĠNYON SĠSTEMĠ
Dişli çark – pinyon mekanizması birbirine geçerek döner hareketten doğrusal hareket
elde etmemizi sağlar. Bu sistemler günlük hayatımızda veya endüstride bir çok alanda
kullanılmaktadır. Kapı açma mekanizmaları bu sisteme en güzel örnektir. Bu tür
sistemlerde motor miline sabitlenmiş dairesel bir dişli çark, hareketli düz bir dişli takımına
oturtulur. Böylece motor çalıştırıldığında dönen mil, çarkı da döndürmüş olur. Bu durumda
çarkın oturtulduğu dişli takımı da çarkın dönmesinden ötürü ileri veya geri yönde doğrusal
bir şekilde hareket etmiş olur. [2] Şekil 2.10.„ da projede kullanacağımız dişli çark - pinyon
sistemi gösterilmiştir.
Şekil 2.10. Dişli çark – pinyon sistemi
Örnek olarak bir kapı açma mekanizmasını düşünelim. Kapının alacağı yol, doğrusal
hareket yapan dişlinin aldığı mesafeye bağlıdır. Bu mesafe de doğrudan motor milindeki
dişlinin yarıçapına ve devir sayısına bağlıdır. Kapının aldığı mesafeye “L” , dişli çarkın
yarıçapına “r” , dişli çarkın devir sayısına da “ n “ diyelim. Bu iki düzenek arasındaki
matematiksel ifade denklem (2.2) deki gibi elde edilir.
(2.2)
Bu denkleme göre, bu sistemle çalışan bir kapıyı 5 metre hareket ettirelim. Çarkın
yarıçapı 3 cm olsun. Bu durumda motorun kaç devir atması gerektiğini hesaplayalım. (2.2)
no ‟ lu denklemden (2.3) no ‟ lu denklemi elde ederiz.
(2.3)
Değerler yerine konulduğunda devir sayısı n = 26,5 olduğu görülmektedir.
14
2.6.DC GÜÇ KAYNAĞI
Elektronik devrelerin birçoğunun çalışması için doğru akıma ihtiyaç vardır. Normal
şebekemiz alternatif akım olduğundan, doğru akıma olan gereksinim alternatif akımı doğru
akıma çeviren doğrultucular tarafından karşılanır. Doğrultucular üç kısımda incelenebilir.
1. Yarım dalga doğrultucular: Alternatif sinyalin sadece tek alternansını filtre eden
doğrultuculardır.
2. Tam dalga doğrultucular: Alternatif akımın her iki alternansını da doğrultan
doğrultuculardır.
3. Köprü tipi doğrultucular: Tam dalga doğrultucu gibi alternatif akımın iki alternansını da
doğrultur. Bu doğrultucular daha iyi filtre sağlarlar.
Doğrultucular kontrollü, yarı kontrollü ya da tam kontrollü olarak tasarlanabilirler. Bu
kullanılan yarı iletken anahtarlama elemanlarının çeşidine bağlıdır. Anahtarlama
elemanları olarak diyot, tristör, transistör, IGBT, MOSFET gibi elemanlar kullanılır.
Beslenecek elektronik ekipmanların ihtiyaçlarına göre değişik genliklerde DC gerilime
gereksinim vardır. Bu sebepten ötürü güç kaynaklarının çıkışları farklı DC kademelerinde
olabilir. Örnek olarak, 220 AC gerilimi, ±5V ve ±12V DC gerilime çeviren güç kaynakları
gibi. Şekil 2.11.„ de projede kullanacağımız güç kaynağı gösterilmiştir.
Şekil 2.11. Bilgisayar güç kaynağı
15
2.7.KONTROL DEVRESĠ
Endüstriyel bir süreçte, her yapılacak işlemi kontrol eden bir sistem vardır. Bu sistemler
endüstri firmalarının gereksinimi doğrultusunda işlemektedir. Her firma kendi üretim
standardına göre üretim aşamalarını en ekonomik, en hızlı, en güvenli bir şekilde
uygulamayı kendine görev edinmiştir. Bu koşullar altında herhangi bir süreci kontrol eden
elektronik devrelerini de en uygun biçimde uygulamaya koymak gerekir.
Projemiz hakkında giriş bölümünde kısa bir bilgi sunmuştuk. Biz de bu projeye göre en
uygun devreyi kurmaya çalıştık. Camların saydamlığını kontrol edip, saydam olmayan
camları sistemin dışına atmayı düşünüyoruz. Bu işlemin kontrolünü PIC (Peripheral
Interface Controller) ile yapmaya karar verdik. Bunun için bir adet 16F877 entegresi
kullanacağız. Yazılımını ise CCS ( Custom Computer Services ) Compiler ile yazacağız.
Motorların çalıştırılıp durdurulmasını ise röleler üzerinden sağlayacağız.
Devremizde kullanılan elemanları kısaca tanıtalım.
2.7.1. Direnç
İçerisinden akım akan elemanların, akıma karşı göstermiş olduğu direnmedir. Birimi
ohm (Ω) dur. Buradan da anlaşılacağı gibi direnci büyük olan elemanların içerisinden
akımın akması zordur. Dirençler devrelerde üzerilerinde gerilim düşümü oluşturmak için
kullanılırlar. Böylece bu gerilim düşümlerine göre devrelerin diğer kısımlarıyla olan
ilişkiler sağlanır. Direnci sabit olan iki ayrı elemana farklı gerilimler uygularsak, bu
elemanların içerisinden akan akımlar da farklı olacaktır. Gerilimi yüksek olandan büyük
akım, düşük olandan küçük akım akar. Ohm Kanunu‟ nun matematiksel ifadesi (2.4) no‟ lu
denklemde gösterilmiştir.
[Ω ]
(2.4)
Direnç (R) değeri gerilimin (V), akıma (I) bölünmesiyle elde edilebilir. Malzemelerin
direnç değerleri malzemelerin yapısına göre değişiklikler gösterir. Bu değerler malzemenin
uzunluğu, kesiti ile öz dirençlerine veya öz iletkenliklerine bağlıdır. Bu büyüklükler
üzerinden direncin hesaplanması ise (2.5) ve (2.6) no‟ lu denklemler elde edilir.
16
[Ω ]
(2.5)
[Ω]
(2.6)
formülleriyle bulunur.
: Malzemenin öz direnci
: Malzemenin öz iletkenliği
: Malzemenin uzunluğu
: Malzemenin kesit alanı
Elektrik – elektronik sektöründe kullanılan tüm devrelerdeki dirençlerin üzerlerinde
onların değerlerini okuyabileceğimiz renkli kodlar bulunmaktadır. Bu kodlar sayesinde
dirençleri ölçmeden hangi direnç değerine sahip olduklarını kolaylıkla anlayabiliriz.
Tablo 2.1 . Direnç değerlerinin okunması
DİRENÇ KODLARI
1.
2.
3. bant
4. bant
Isıl
bant
bant
(çarpan)
(tolerans)
katsayısı
0
00
×100
Kahverengi 1
1
×101
±1% (F)
100 ppm
Kırmızı
2
2
×102
±2% (G)
50 ppm
Turuncu
3
3
×103
15 ppm
Sarı
4
4
×104
25 ppm
Yeşil
5
5
×105
±0.5% (D)
Mavi
6
6
×106
±0.25% (C)
Mor
7
7
×107
±0.1% (B)
Gri
8
8
×108
±0.05% (A)
Beyaz
9
9
×109
Renk
Siyah
Altın
×0.1
±5% (J)
Gümüş
×0.01
±10% (K)
Renksiz
±20% (M)
17
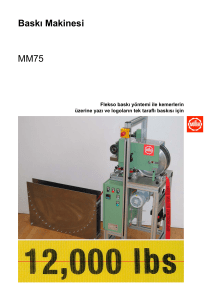
Tablo 2.1.‟ de, 1. ve 2. bantlar rakamları gösterir. 3. bant rakamların yanına
eklenecek kaç sıfır olduğunu gösterir. 4. bant ise direnç değerinin hata toleransını gösterir.
En yüksek hata tolerans oranı (A) harfinin bulunduğu gri renkli bantta ±0.05% oranındadır.
En yüksek hata oranı ise
±20% ile tolerans renginin bulunmadığı dirençlerdedir.
Şekil 2.12. Direnç üzerindeki bantlar
Örneğin Şekil 2.12. „ deki direncin ilk bandı kahverengi, ikinci bandı siyahtır. Buradan
12 sayısına ulaşırız. Çarpan olarak ise 3. bant turuncu olduğundan 3 tane sıfır gelecektir.
Böylece direnç değerimizin 12000 Ω yani, 12 kΩ olduğu görülür. Tolerans olarak da son
bant altın renginde olduğundan bu direncin toleransını ±5% olarak değerlendirebiliriz.
2.7.2. Röle
Elektromanyetik teori üzerine çalışan anahtarlama elemanıdır. Röle içerisinde bobin,
palet ve kontak barındırır. Bobin içerisinden akım geçtiğinde oluşan manyetik alanla metal
kontak konumunu değiştirir. Böylece kontakların bağlı olduğu devre bir durumdan diğer
duruma geçer. Genel bir ifadeyle röleler zayıf akımlı devreler ile yüksek akımlı devreleri
kontrol etmeye yararlar. Biz de proje de PIC ve LDR elemanlarının davranışları ile röleyi
uyaracağız. Röle de konum değiştirerek motorların çalışmasını ya da durdurulmasını
sağlayacaktır. Rölelerin kontakları iki durumludur. Normalde kapalı (NC) ve normalde
açık (NO) kontaklardır. Devredeki durumuna göre bu kontaklar tercih edilirler. Şekil 2.13.
„ de projede kullanacağımız röle gösterilmiştir.
18
Şekil 2.13. Omron 5 V‟ luk DC Röle
2.7.3. Transistör
Elektronik dünyasının en önemli buluşlarından birisi olan ve bu sektörün gelişmesini en
çok hızlandıran elemanların başında gelen transistörler akım ve gerilim kazancı sağlamak
amacıyla üretilmişlerdir. Ayrıca kesim ve doyum bölgesinde çalıştırılarak elektronik
devrelerde anahtarlama görevi de görmektedir. Kullanım alanı oldukça geniştir.
Transistörlerin 3 tane bacağı vardır. Bunlar kolektör, baz ve emetördür. Baza verilen
akımın şiddetine
göre kolektör ve emetör akımlarının değeri değişmektedir. Bu da
transistörün akım kontrollü bir eleman olduğunu göstermektedir.
Proje de seri LDR elemanlarının bir ucuna +5 V‟ luk gerilim vereceğiz. Diğer ucuna da
transistörün bazını bağlayacağız. Bu durumda LDR‟ ler yüksek direnç gösterdiği zaman
baz akımı çok düşük olacağından transistör kesimde olacaktır. LDR düşük direnç
gösterdiği zaman ise baz akımı olacak böylece transistör iletimde çalışacaktır. Ayrıca
motorların sürülmesi için de transistörlerden faydalanacağız. Şekil 2.14.„ de projede
kullanacağımız transistör gösterilmiştir.
Şekil 2.14. BC547 Transistör
19
Transistörler PNP ve NPN olmak üzere iki türlüdür. PNP transistor de baz emetöre göre
daha az potansiyele sahip olduğunda transistör iletime geçer. NPN de ise baz emetöre göre
daha yüksek potansiyele sahip olduğunda transistör iletime geçer. Transistörün devredeki
simgesinde bu durum bir ok ile gösterilmektedir. Eğer ok bazdan emetöre doğru ise NPN
transistör, emetörden baza doğru ise PNP transistör olduğu anlaşılır. Şekil 2.15. ve Şekil
2.16.„ da bu transistörlerin devrelerde belirtilişi gösterilmiştir.
Şekil 2.15 . NPN transistör
Şekil 2.16. PNP transistör
2.7.4. LDR ( Light Dependent Resistance)
Üzerine düşen ışık şiddetinin miktarına bağlı olarak direnci değişen bir devre
elemanıdır. Eğer üzerine düşen ışık şiddeti yüksekse düşük dirence sahip olur. Düşük
şiddette bir ışık düşürülürse yüksek dirence sahip olur. Bu elemanlar CdS (kadmiyum
sülfür) , germanyum , silisyum , selenyum gibi ışığa karşı duyarlılığı olan maddelerden
üretilmektedir. Şekil 2.17.„ de projede kullanacağımız LDR elemanı gösterilmiştir.
Şekil 2.17. LDR elemanı
20
LDR‟ ler karanlıkta megaohm mertebelerinde dirence sahipken, aydınlıkta 10 ila 100
ohm mertebesinde dirence sahiptir. Bu özelliği elektronik devrelerde kolay bir şekilde ışığa
duyarlı anahtarlama elemanı olarak kullanılabilmesini sağlar. Transistör, FET, tristör gibi
elemanların tetiklenmelerinde kullanılırlar.
Endüstride fotoğraf makinesi flaşör devresinde, zillerde, alarm devrelerinde, aydınlatma
sistemlerinde ve bunlar gibi ışığa duyarlı birçok alanda kullanılırlar.
Lazerlerden yayılan ışın dağılmadan yol alabildiğinden belirli mesafelerdeki LDR
elemanları üzerine düşürülebilir. Bu durumda LDR‟ nin direnci düşüktür. Lazer ışınının
LDR üzerine düşmesini önleyen bir durum olduğunda bir anda direnci artar. Bundan
faydalanılarak lazerli güvenlik sistemleri tasarlanmıştır. Bir elektronik düzenek sayesinde
lazer ışık kaynağı ile LDR üzerine ışık düşürülür. Eğer lazer ışık kaynağı ile LDR arasına
ışığın geçmesini önleyecek bir engel girerse, LDR anahtarlama elemanlarını direnç
değişimiyle uyarır ve bir başka elektronik devre düzeneğini harekete geçirerek alarm
çalmasını sağlar.
2.7.5. Lazer
Lazer kelimesi ingilizce “light amplification by stimulated emission of radiation”
kelimelerinin kısaltılmış halidir. Uyarılmış ışınla ışığın kuvvetlendirilmesi anlamına
gelmektedir. ABD‟ li Theodore H. Maiman tarafından 1960 yılında keşfedilmiştir. Lazerin
temeli enerji düzeyleri arasındaki elektron geçişleri ile oluşan ışık fotonlarına
dayanmaktadır. Günlük hayatımızın birçok yerinde karşımıza çıkmaktadır. Bilgisayarlarda
CD ve DVD‟ lerin okunmasında, marketlerde barkot okuyucularında, sinyal iletiminde,
güvenlik sistemlerinde, hedef belirlemede, endüstride kesme işlemlerinde kullanılmaktadır.
Çok dikkatli kullanılmalıdır. Gözlere zarar verebilir, yangın çıkarabilir. Şekil 2.18.„ de
projede kullanacağımız kırmızı lazer ışık kaynağı gösterilmiştir.
21
Şekil 2.18. Lazer kaynağı ve lazer ışınının huzmesi
Lazer ışınları oldukça kuvvetlidir, dağılmaz ve yön verilebilir. Normal ışık, değişken
fazlarda, frekanslarda ve ya renklerde olabilir. Buna karşılık lazer, tek renkli, aynı
frekanslı, büyük genlikli dalgalardan oluşur. Tek frekanslı olması ve çok yüksek
frekanslarda çalışması kayıpları oldukça azaltmaktadır. Bu da lazer ışığının çok uzak
mesafelere dağılmadan ışınları iletilebildiği anlamına gelir. Lazerler bu özellikleriyle fiberoptik teknolojisinin gelişmesinde öncü rol oynamıştır. Artık günümüzde haberleşmeyi
sağlayan kabloların fiber-optik kablolar olduğu söylenebilir. Bu kablolar oldukça hızlı ve
kayıpsız bir iletişim sağlarlar. Bu da haberleşmenin giderek daha kolay sağlanabilir
olduğunu gösterir.
2.7.6. Kristal Osilatör
Elektronikte belirli frekanslarda işaret üreten devrelere osilatör devreleri denir. Bu
devreler osilasyon frekansında osilatör olarak çalışırlar ve sabit frekanslı bir işaret
üretmeye başlarlar. Kristal osilatör de bir osilatör devresi olarak düşünülebilir. Bu eleman
piezoelektrik özellik gösteren elemandır. Yani üzerinde baskı oluştuğunda bir gerilim
oluşturur. Bu özelliğinden faydalanılarak bu eleman üzerinde bir DC gerilim oluşturursak
üzerinde bir gerilme oluşacağından eleman burkulur. Aynı DC gerilimi ters kutupla
uygularsak bu kez ters yönde burkulur. Dolayısıyla bu elemana belli frekansta bir AC
gerilim verirsek sürekli titreşmeye başlar. Saatler gibi sabit frekansın önemli olduğu
alanlarda kullanılırlar. Kristal osilatörler genellikle piezoelektrik özelliği olan quartz
madeninden yapılmaktadır. Şekil 2.19.„ daki osilatör projede kullanılacaktır.
22
Şekil 2.19. Kristal osilatör
2.7.7. Mercimek Kondansatör
Kondansatörler iki metal tabakanın arasına bir yalıtkan malzeme yerleştirilerek yapılır.
Böylece metal tabakalarda oluşan kutuplaşmayı depolamayı sağlar. Elektronikte çok sık
biçimde kullanılırlar. Yük depolamada, AC-DC dönüşümlerde, reaktif güç kontrollerinde
bu elemanlardan faydalanılır. Devre elemanımız olan kondansatörün rengi ve şeklinin
mercimeğe benzemesi dolayısıyla adı elektronikte mercimek kondansatör olarak
kullanılmaktadır. Şekil 2.20.„ deki kondansatör projemizde kullanılacaktır.
Şekil 2.20. Mercimek kondansatör
Kondansatörlerin de dirençler gibi değerlerinin kolayca anlaşılmasını sağlamak üzere
üzerlerinde sayılar bulunmaktadır. Bu sayıların ilk iki rakamı bir değer belirtir. Sonraki
sayı ise bu değerin yanına konulacak sıfır sayısını belirler. Oluşan rakam pF üzerinden
değerlendirilir. Örneğin üzerinde 132 yazan bir kondansatörün 13x102 „ den 1300 pF , yani
1,3 nF olduğu görülür.
23
2.7.8. ULN2003 Entegresi
ULN2003 entegresi projede yer alan step motoru sürmek için kullanılmıştır. Step
motorların sürekli olarak adım alabilmesi bu şekilde sürücülere ihtiyaçları vardır. Çünkü
içerisindeki sargılara sıralı bir şekilde enerji verilmesi sağlanmalıdır. ULN2003 bu
bakımdan oldukça kolaylık sağlayan bir entegre elemandır. Toplamda 16 adet bacağı
vardır. İçerisinde transistörler ve diyotlar bulundurmaktadır. Bu elemanlar sayesinde
anahtarlama görevi yapılarak farklı bacaklara logic 1 ve logic 0‟ lar uygularlar. Bu
anahtarlama düzene koyulduğunda step motorun ihtiyacı olan sıralı bir şekilde enerji
verilmesi sağlanmış olur.[3] Şekil 2.21.„ de projede kullanılacak olan sürücü entegresi
gösterilmiştir.
Şekil 2.21. ULN2003 entegresi
2.7.9. PIC16F877 Mikrodenetleyicisi
Microchip firmasının üretmiş olduğu bir mikro denetleyicidir. Üretmiş olduğu mikro
denetleyicileri PIC (Programmable Interface Controller) diye isimlendirmiştir. Ürettiği bu
denetleyiciler 8, 16 ve 32 bitlik olarak tasarlanmıştır. Mikro denetleyicilerin bit sayısı
yükseldikçe işlem yetenekleri artmaktadır. Bizim devremizde yer alan PIC16F877 elemanı
ise 8 bitlik bir elemandır. Mikro denetleyicilerde iki tür bellek vardır. Bunlar program
belleği (PROM) ve veri belleği (RAM) olarak ayrılırlar. Kullanıcının yazmış olduğu
program PROM dediğimiz bellek biriminde depolanır. Bu bellekler değişik formatlarda
olabilir. Bunlardan FLASH ROM (EEPROM) elektrikle yazılan ve elektrikle silinebilen
24
bellektir. PROM, elektrikle yazılan ve silinmesi için ultraviyole ışına ihtiyaç duyan
bellektir. OTP (ROM) ise yalnızca bir kez programlanabilen bellektir. PIC16F877 FLASH
ROM bellek özelliği olan ve binlerce kez programlanabilen bellektir. PIC16 F877 mikro
denetleyicisi, 40 bacaklı olup, 5 adet giriş – çıkış port gruplarını barındırır. Bu portlar A,
B, C, D ve E diye harflerle ifade edilirler. Her portun belirli sayıda biti vardır. Bu bitlere
istenildiği gibi giriş veya çıkış komutları verilebilir. Program yazarken de yapılan bu
görevlendirmeler dikkate alınmalıdır. Program bilgisayar üzerinden yazıldığı için
yapılabilecek bir hata PIC‟ in çalışmamasına neden olabilir. Bu yüzden PIC programlarken
komutlara oldukça dikkat etmeliyiz.[3]
Mikro denetleyicilerin çalıştırılması için reset ve osilatör devresine ihtiyaç duyulur.
Günümüzde birçok elektronik eşyalarda, özellikle akıllı sistemlerde sıkça kullanılırlar.
Bant motorunun ve step motorun kontrolünü, camların saydamlık durumuna göre bu
PIC16F877 ile denetleyeceğiz. Şekil 2.22.„ de bu PIC gösterilmiştir.
Kullanmış olduğumuz mikro denetleyicinin programını ise CCS C Compiler ismi
verilen bir derleyici sayesinde yazacağız. Bu program C tabanlı bir programdır. Bir sonraki
bölümde ayrıntılı bilgi ve yazılım hakkında açıklamalara yer vereceğiz.
Şekil 2.22. PIC16F877‟nin dıştan görünümü
25
BÖLÜM 3
PROJENĠN ÇALIġMA SÜRECĠ
3.1. BANT MOTORU VE BANDIN ÇALIġTIRILMASI
Taşıma bandının hareketini sağlamak için, araçların sileceklerini çalıştıran kalıcı
mıknatıslı DC motor kullandık. Bu motorlar normalde miline yüksek hız verirler. Fakat
motor düzeneği ile birlikte yapılan redüktör sistemi ile bu hız küçültülür ve mile verilen
moment artırılmış olur. Bu orantıyı şu (3.1.) formülü ile açıklayabiliriz.
(3.1)
P : güç [W] (watt)
M : moment [Nm] (newton metre)
ω : açısal hız [r/s] (radyan/saniye)
Motorun sabit güç ürettiğini düşünelim. Mile verilen hız ve moment belli olsun. Eğer
milden yüksek moment almak istiyorsak mile dişliler ekleyerek hızı düşürürüz. Denklemin
eşitliğinden anlaşılacağı gibi hız düştüğünde moment artacaktır. Böylece silecek motorları
düşük hızda çalışırlar, fakat sileceklerin sahip olduğu yük momentini kaldıracak seviyede
yüksek moment üretirler.
Biz de bantta hızı düşük momenti yüksek olan bu tip DC motor kullandık. Bu sayede
motor hem bandın yükünü hem de bantta taşınacak olan malzemenin yükünü kolaylıkla
kaldırabilecek momente sahip olacaktır. Kullandığımız motor Şekil 3.1.„ deki gibidir.
Şekil 3.1. Kalıcı mıknatıslı, redüktörlü cam silecek motoru
26
Şimdi kullandığımız bant ile ilgili bilgiler verelim. Taşıyıcı bandı çalıştırmak üzere
MAKO firmasının üretmiş olduğu araç silecek motorunu kullandık. MAKO firması
Türkiye‟ nin otomotiv parçaları üretiminde öncü kuruluşlarından bir tanesidir. Türk ve
yabancı sermayelerin ortaklığıyla Bursa‟ da kurmuş olduğu fabrikasında üretimini
sürdürmektedir. Bu firmaya ait olan bu motor, kalıcı mıknatıslı bir DC motor olup çalışma
gerilimi 9 - 16 V „ tur. Maksimum kilitleme momenti 36 Nm‟ dir. Düşük ve yüksek
kademeli çalışmasına bağlı olarak yaklaşık 2.5 A ila 5 A civarında akım çekmektedir.
Şekil 3.2. Taşıyıcı bant ve bant motoru
Kullanmış olduğumuz taşıyıcı bant ise Şekil 3.2.„ de gösterildiği gibi iki silindirli olup
motor mili tek bir silindirin bir tarafına sabitlenmiştir. Bandın zemine sabitlenmesi için
doğrama demir kullanılmıştır. Bant çalışır iken takozlara oturtmuş olduğumuz camları
bandın başına yerleştireceğiz ve camlar bant üzerinde yol alacak. Takozlar 2 cm
yüksekliğinde ve 8 cm uzunluğunda yapılmıştır. Cam ebatları da 8x6 cm olup takoz
üzerine dik şekilde yerleştirilecektir. Banda konulan bu camlar ilerleyerek Lazer-LDR
Düzeneği‟ nin önüne gelecek ve camın saydam olup olmadığı bu aşamada saptanacaktır.
Bir sonraki konumuzda bu düzeneğin nasıl çalıştığına dair bilgiler vereceğiz.
27
3.2. LAZER – LDR DÜZENEĞĠ
Bu kısım sistemimizin en can alıcı noktasıdır. Oldukça basit bir çalışma prensibi vardır.
Fakat en önemli görev Lazer – LDR Düzeneği‟ ne düşmektedir. Konumuz camın saydam
olup olmadığını tespit etmek olduğu için bu işlemi, bu düzenek sayesinde
gerçekleştireceğiz. Sistemin çalışma mantığı LDR dediğimiz bu foto-dirençler üzerinedir.
Önceden belirttiğimiz gibi foto-dirençlerin üzerine düşen ışık miktarı yüksek olunca
direnci oldukça düşecektir. Eğer üzerine düşen ışık miktarı az olursa bu sefer direnci çok
yükselecektir. Bu direnç değişimi ile ilgili olarak yapmış olduğumuz ölçümlerde şu
sonuçlara vardık. Kullanmış olduğumuz LDR‟ ye lazer tuttuğumuzda direnci yaklaşık 100
– 120 Ω civarındadır. Lazerin önüne bir engel koyduğumuzda LDR karanlıkta kalacaktır.
Bu durumda yapmış olduğumuz ölçümlere göre de LDR‟ nin direnci yaklaşık 1 M Ω
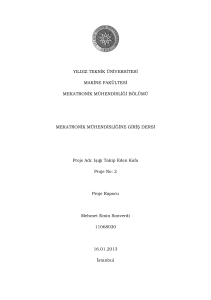
hesaplanmıştır. Bu direnç farkı bizim için oldukça yeterlidir. Şekil 3.3.„ de kullandığımız
Lazer-LDR Düzeneği gösterilmiştir.
Şekil 3.3. Lazer – LDR Düzeneği
Foto-dirençlerin bu özelliğinden yola çıkarak bant üzerinde yürüttüğümüz camlara
dik gelecek şekilde bandın bir yanına lazer kaynağını, diğer yanına da LDR elemanlarını
yerleştirdik. Lazer kaynaklarını açıp ışınların tam olarak foto-dirençlerin üzerine gelmesini
sağladık. Bant üzerinde yürüyen cam hiç durmadan bu düzeneğin içerisinden geçecektir.
Cam saydam ise foto-dirençlerin üzerine ışık düşmeye devam edeceğinden herhangi bir
28
direnç değişimi olmayacaktır. Böylece sistem algılama yapmayıp camlar bant üzerinde
ilerlemeye devam edecek ve cama uygulanacak olan bir sonraki sürecin içerisine
girecektir. Eğer gelen camlardan herhangi birisinde camın saydamlığını bozacak leke gibi
bir durum olduğunda bu leke lazerden çıkan ışınların foto-dirençlere ulaşmasını
engelleyecek ve foto-dirençlerin direncinde aniden yükselme olacaktır. Bu durumu bir
algılama olarak değerlendirebiliriz. Aynen X-ray cihazları gibi düşünelim. Havaalanlarında
gördüğümüz X-ray cihazları, yolcuların valizlerini bant üzerinde taşıyıp hareket halinde
iken taramadan geçirir. Valizlerdeki metalik eşyalar bilgisayar üzerinde görüntülenir. Eğer
güvenlik unsurlarını tehlikeye sokacak herhangi bir durum olduğunda alarma geçilir.
Bizim de hazırlamış olduğumuz Lazer – LDR Düzeneği‟ nde bu tarzda bir tarama
yapmış oluyoruz. Eğer saydam olmayan cam olursa bu camı tespit edeceğiz. Sonraki
aşamada da bu cam konveyör üzerinden alınacak ve tekrar gözden geçirilmek üzere sürecin
dışına çıkarılacaktır.
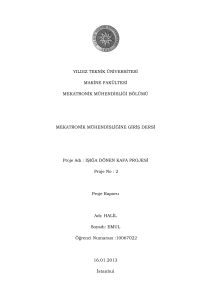
Şekil 3.4. Lazer – LDR Düzeneği‟ nin Simülasyonu
Şekil 3.4.„ de gösterilen devrede foto-dirençleri bir transistorün bazına seri şekilde
bağladık. Yalnız simülasyonda aydınlık karanlık değişimini sağlamak mümkün olmadığı
için foto-dirençler yerine direnç ve bunlara paralel butonlar koyarak anahtarlama yaptık.
Böylece buton açık olduğunda devreye direnç girecek ve bu direnç üzerinde oluşan
gerilimle transistör iletime geçip kolektörüne bağlı olduğu röleyi çalıştıracaktır. Röleye
bağlı olan PIC ya da denetleyici bir eleman da sinyal alarak yapması gereken görevi yerine
29
getirecektir. Burada röle yalıtım amaçlı kullanılmıştır. Ayrıca PIC‟ e gerilimi düzgün
vermesi düşünülmüştür.
Hazırlamış olduğumuz bu devre simülasyonda başarılı bir şekilde çalışmıştır. Bu
devrenin gerçek şartlarda çalışıp çalışmadığını görmek için breadboard denilen delikli
devreler üzerinde denemeler yaptık. Fakat istediğimiz sonucu alamadık. Foto-direnç
üzerindeki değişikliklerin transistorü iletime sokmadığını gözlemledik. Bunun üzerine FET
kullanarak aynı sistemi uygulamaya çalıştık. Gerilim kontrollü bir eleman olan FET‟ in bu
sorunu çözmesi gerektiğini düşünüyorduk. Fakat bu sefer empedans uyumu sıkıntısı
yüzünden aynı problemle karşılaştık. Daha sonra farklı bir çözüm yolu denendi. Seri fotodirençlerin bir tarafına enerjiyi verdik. Diğer tarafını da transistörün bazına bağladık. Bu
durumda LDR‟ lerin üzerine ışık düşmediğinde artan direnç, üzerine düşen gerilimi
artıracak ve baz akımını düşürecekti. Bu şekilde yaptığımız uygulamalarda istediğimiz
sonucu kısmen aldık. Şöyle ki, devrede kullandığımız foto-direnç sayısı artınca akım aşırı
düştüğünden baz akımı iletime sokma akımının altına inmektedir. Böylece transistör
iletime geçememektedir. Çünkü foto-dirençlerin aydınlıkta da belli dirençleri olduğundan
sayı ne kadar artarsa akım o kadar düşecektir. Bundan dolayı bizde çözümü foto-direnç
sayısını düşürerek sağladık. Devrede normalde 4 tane kullanacağımız foto-direnç sayısını 2
ye düşürmeyi uygun gördük. Bu durumda yapmış olduğumuz deneme başarılı sonuç verdi.
Şekil 3.5. Projede kullanılacak olan simülasyon
30
Şekil 3.5.„ te gösterildiği gibi sonuç olarak projemizde 2 adet LDR ve bu LDR‟ lerin
üzerine düşüreceğimiz ışık kaynağı olarak da 2 adet lazer kaynağı kullanacağız. LDR‟ lere
düşen bu iki ışık huzmesinin her hangi birisi foto-dirençlerin üzerine gitmediği taktirde
sistem transistorü iletime sokarak röle üzerinde kullanacağımız PIC16F877 mikro
denetleyicisini uyaracaktır. Bu durumda camda saydamlığı engelleyecek bir durum
oluşmuş demektir. Burada denetleyicimiz camı sürecin dışına çıkarmak üzere gerekli
işlemleri yapacaktır. Bu işlemlerin nasıl gerçekleştiği bir sonraki konuda detaylı bir şekilde
anlatılacaktır.
3.3. CAMI BANTTAN AYIRAN DÜZENEK
Bu kısımda camların üzerinde saydamlığı bozan herhangi bir leke varsa o camı dışarıya
çıkaran düzeneği anlatacağız. Saydam olmayan cam Lazer – LDR Düzeneği‟ nde tespit
edildikten sonra kullanmış olduğumuz mikro denetleyiciye bir uyarı gider. Bu uyarıya göre
sensör olarak kullandığımız bir diğer Lazer – LDR Düzeneği o camı algılayana kadar bant
dönmeye devam eder. Cam algılandığı zaman yaklaşık 1 sn sonra bant durur ve devreye
camı çıkarmak üzere Dişli çark – Pinyon Sistemi girer. Bu sistem camın oturtulduğu
takoza yandan müdahale edecek onu sürükleyerek devreden çıkaracaktır. Şekil 3.6.„ da
kullanılacak olan bu sistem gösterilmiştir.
Şekil 3.6. Sensör ve Dişli çark – Pinyon Düzeneği
31
Şimdi Dişli çark – Pinyon Sistemi hakkında bilgi verelim. Öncelikle camı devreden
çıkarmak için kayar bir düzeneğe ihtiyacımız vardı. Bu ihtiyacı çekmece rayı ile sağladık.
Kaymanın belirli ölçülerde yapılabilmesi için dişliler gerekmekteydi. Metal bir düz dişli
takımını çekmece rayına gümüş kaynak yardımıyla sabitledik. Bu dişlilere uygun bir
dişliye sahip motor ile bu düzeneği ileri geri hareket ettirmeyi düşünüyoruz. Motor olarak
step motor kullanmaya karar verdik. Bu motoru tercih etmemizin sebebi PIC ile kolaylıkla
kontrol edebilmemizdir. Motor sürmek içinse ULN2003 kullandık. Motor dişlisini kayan
düzeneğin dişlisiyle denkleştirmek için araya bir dişli dönüştüren düzenek yerleştirdik.
Böylece motorun her turunda düzeneğe uygun hale getirilen dişli de bir tur dönecektir ve
kayan düz dişli takımı, dönüş yönüne göre ileri ya da geri hareket edecektir.
Bant genişliğini hesaba katarak motorun kaç tur dönmesi gerektiğini hesapladık. Bu
hesaba göre, motor 4 tur ileri dönecek ve camı devreden çıkarıp 4 tur da geri dönerek eski
konumunu alacaktır. Dişli çark – Pinyon Düzeneği‟ nin camı çıkarması için sistemin bant
yüksekliğinde tutulması gerekiyordu. Bunun için altına tahta koyarak kayan takımı bunun
üzerine monte ettik. Tahtanın yüksekliğini camı çıkarak olan düzenek tam takoza denk
gelecek şekilde hesapladık. Böylece kayan dişli ilerleyecek ve takoza temas edip onu
iteleyerek bandın dışına atacaktır.
Bundan sonraki konumuzda anlatmış olduğumuz bu süreçlerin PIC16F877 mikro
denetleyicisindeki yazılımını inceleyecek ve her bir adımın hangi görevleri yaptığını
detaylı şekilde açıklayacağız.
3.4. PIC16F877 ‘ NĠN YAZILIMI VE AÇIKLAMASI
Mikro denetleyicimizin yazılımını CCS Compiler programı sayesinde gerçekleştirdik.
Bu yazılımın her adımını aşağıda kademe kademe açıkladık. Yapmış olduğumuz proje
aynen bu yazılım üzerine çalışmaktadır.
#include <16f877.h>
//Mikrodenetleyicimiz PIC16f877 seçimi yapıldı
#use delay(clock=4000000)
// Kristalimiz osilatör 4 Mhz (delay fonksiyonu için)
#fuses XT, NOPROTECT, NOBROWNOUT, NOLVP, NOCPD // Fuse ayarları yapıldı
int kir;
int ileri_adim[5]={ 0b00000000,0b00000010,0b00000100, 0b00001000, 0b00000001 };
32
int geri_adim[5]={ 0b00000000,0b00001000,0b00000100, 0b00000010, 0b00000001 };
int ileri=0;
int geri=0;
int i=1;
//Döngülerde kullanacağımız değişkenler ve step motor bobinlerinin enerjilendirme sırasını
// belirleyen diziler belirlendi.
#int_timer0
// Timer0 tanımlandı.
leke()
{
// Burada sürekli olarak camın kirli olup
if(input(PIN_A1)==1)
// olmadığını kontrol eden sensörden uyarı
{
// bekleniyor, uyarın gelmezse "kir"
kir=1;
// değişkenine 0, uyarı gelirse 1 değeri
// veriliyor.
}
}
void main()
{
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DISABLED,0,1);
set_tris_a(0b000110);
// A0 pini yürüyen bant motoru,
set_tris_b(0b00000000);
// A1 pini kiri tespit eden devrenin
set_tris_c(0b00000000);
// enerjilendirildigi bacaklar.
set_tris_d(0b00000000);
// A2 pini kirli camin itilmeden önce yürüyen
33
set_tris_e(0b000);
// bandı durdurmak için kullanılan camı algılayan
// optik sensöre ait bacak.
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_4);
enable_interrupts(INT_TIMER0);
// Kesmeler aktif hale getiriliyor.
enable_interrupts(GLOBAL);
output_high(PIN_A0);
// Bant çalıştırıldı.
output_b(0b00000011);
// Step motora ilk konum veriliyor
while(1)
{
while( input(PIN_A2) == 0 );
if ( kir == 0 )
// Sensor cami görene kadar bant donuyor
// Eğer kir yoksa cam dışarı itilmiyor.
{
output_low(PIN_A3);
}
if ( kir == 1 )
// Eğer kir varsa cam itme işlemine geçiliyor
{
output_low(PIN_A0);
// Bant durduruluyor
delay_ms(500);
// Yarım saniye bekliyor
while ( ileri< 4*48 )
// Step motor 4 tur ileri dönüyor
{
delay_ms(20);
output_b(ileri_adim[i]);
34
i++;
ileri++;
if (i==5)
{
i=1;
}
}
output_b(0b00000011);
// Step motora ilk konum veriliyor
delay_ms(250);
// Bir süre bekleniyor
while ( geri< 4*48 )
// Step motor 4 tur geri dönüyor
{
delay_ms(20);
output_b(geri_adim[i]);
i++;
geri++;
if (i==5)
{
i=1;
}
}
ileri=0;
// Yeni işlem için değişkenler
geri=0;
// ilk değerlerine döndürülüyor.
35
i=1;
output_b(0b00000011);
// Step motora ilk konum veriliyor.
delay_ms(500);
// Yarım saniye bekleniyor.
output_high(PIN_A0);
// Tekrardan bant çalıştırılıyor.
kir=0;
// Yeni işlem için değişken sıfırlanıyor
}
}
}
36
BÖLÜM 4
DEĞERLENDĠRME VE SONUÇ
4.1. DEĞERLENDĠRME
Yapmış olduğumuz bu projede mühendislik bölümünde görmüş olduğumuz bilgileri
kullanarak görsel bir sonuç elde etmek istedik. Özellikle bu bölümdeki 4. Yılımızın her iki
döneminde de aldığımız dersler doğrultusunda öğrendiğimiz bilgileri projemizde yararlı
olacak şekilde kullandık. Konveyör sistem, dişli çark – pinyon sistem, kalıcı mıknatıslı DA
motorlar, step motorlar, mikro denetleyiciler gibi günlük hayatımızın her alanında
karşılaşabileceğimiz
bu
aygıtları
kullanmaya
çalıştık.
Proje
aşaması
boyunca
mühendisliğin temel ilkelerinden olan basitlik ve ekonomikliği göz önünde bulundurarak
bir mekanik süreç oluşturduk. Örneğin sensör olarak cam kontrolünde kullandığımız Lazer
– LDR Düzeneği‟ nin aynısını kullandık. Lazerler ve LDR‟ ler piyasada kolaylıkla
bulunabilen ve fiyat konusunda da sensörlere oranla oldukça ucuz elemanlardır. Bir başka
örnek verecek olursak, kontrol devresinin beyni olarak mikro denetleyici kullanmaya karar
verdik. Bu eleman yerine endüstriyel açıdan ortama daha uygun hale getirilmiş PLC de
kullanılabilirdi. Sonuçta PLC cihazının içerisinde de mikroçip bulunmaktadır. Fakat fiyat
açısından mikro denetleyiciler piyasada PLC‟ lere oranla oldukça ucuzdur.
4.2. SONUÇ
Cam saydamlık kontrolü süreci, günlük hayatımızda endüstriyel olarak rastlamadığımız
bir süreç olabilir. Fakat camların oldukça geniş kullanım alanı ve hayatımızdaki önemi göz
önüne alındığında bu sürecin de endüstriyel süreçlerin içerisine dahil edilebileceğini
söyleyebiliriz. Bundan dolayı biz de hayali olarak oluşturmuş olduğumuz bu süreci
projemize taşıdık. Projemizin tamamlanmış hali Şekil 4.1.‟ de gösterilmiştir. Tabi ki bu
projeyi yaparken örnek teşkil edilebilecek referans kaynaklarımız olmadığı için, bu durum
bir takım sıkıntıları da beraberinde getirmiştir. Fakat bu projenin geliştirilerek endüstriyel
alanda kullanılabilecek hale getirilmesiyle yeni bir süreci hayatımıza dahil etmiş oluyoruz.
Burada amacımız, otomasyon ve kontrol alanındaki bilgilerimizi pratiğe dökerek
mühendislik hayatımıza emin bir adım atmaktır.
37
Şekil 4.1. Cam saydamlık projesinin son hali
38
KAYNAKLAR
[1] Bal Güngör , “Özel Elektrik Makinaları”, Seçkin Yayıncılık, 99-123, Şubat 2006.
[2] Okumuş H. İbrahim, “Sürücü Düzenekler”, Ders Notları, 88, Şubat 2011
[3] Elektrik Makinaları ve Güç Sistemleri Laboratuarı Deney Föyleri, 2011