Uploaded by
common.user3415
Araba-Ters Sarkaç Kontrolü Tezi

T.C.
FIRAT ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
ARABA-TERS SARKAÇ KONTROLÜ
BİTİRME ÖDEVİ
HAZIRLAYAN
İbrahim ÇERİ
Kaan GÜRARSLAN
DANIŞMAN
Doç. Dr. Ayşegül UÇAR
ELAZIĞ
2019
KABUL VE ONAY
Bu çalışma Fırat Üniversitesi Mühendislik Fakültesi Mekatronik Mühendisliği Bölümüne Bitirme
Projesi yükümlülüğünü yerine getirmek amacıyla sunulmuştur.
İbrahim ÇERİ
Kaan GÜRARSLAN
Öğrenci No:14280025
… /…/ 2019
Öğrenci No:15280016
İmza:
Proje Danışmanı:
Doç. Dr. Ayşegül UÇAR
Verilen Not:
Jüri Üyeleri
İmza
Üye :
Üye:
Üye:
Sınav Tarihi:
… / … / 2019
Bölüm Başkanı
Doç. Dr. Oğuz YAKUT
2
ÖNSÖZ
Bu tez çalışmamızda, temel kontrol problemlerinden biri olan araba-ters sarkaç deneyini geniş
kapsamda araştırma yapma fırsatı bulduk ve bu çalışma neticesinde, sistem tasarımı, modellemesi ve
kontrol yönteminin belirlenmesini geniş çaplı irdeledik.
Çalışmamız sırasında bizlerden tecrübe ve bilgisini esirgemeyen Sayın Doç. Dr. Ayşegül UÇAR ’a ve
bu süreçte bizlerden yardımını ve desteğini eksik etmeyen Sayın Yakup ÖKDEM ve Sayın Mehmet Can
TÜRK ’e teşekkürü bir borç biliriz.
… /… / 2019
ELAZIĞ
İbrahim ÇERİ
Kaan GÜRARSLAN
I
İÇİNDEKİLER
ÖNSÖZ…...………………………………………………………………..………………………………………………………………………I
İÇİNDEKİLER…………………………………………………………….……………………………………………………………………..II
ŞEKİLLER ve TABLOLAR LİSTESİ…….…………………………………………………………………………….………………...IV
SEMBOLLER…………..…………………………………………………………………………………………………….………………….V
KISALTMALAR………..………………………………………………….…………………………………………………….…………...VI
ÖZET………………………………………………………………………………………………………………………….……..………….VII
ABSTRACT…………………………………………………………………….…………………………………………………...……….VIII
1
GİRİŞ…………………..…………………………………………………………………………………………………………………….1
1.1 Amaç……………………………….……………………………………….………………………………………………………..1
1.2 Litaratürde Ters Sarkaç Sistemi………………………………….……………………………………………………….1
1.3 Ters Sarkaç Sistemi Uygulama Alanları……………………….………………………………………………………2
2 PROJENİN TANIMI…………………………………………………………………………………………………………………….4
2.1 Ters Sarkaç Sistemi.………………………………………………………………………..……………………………......4
2.2 Araba-Ters Sarkaç Sistemi………………………………………………………………………………………………….5
2.3 Araba-Ters Sarkaç Sisteminin Yapısı…………………………………………………………………………………..6
3 ARABA-TERS SARKAÇ SİSTEM TASARIMI…………………………………………………………………………………..7
3.1 Mekanik Tasarım………………………………….…………………………………………………………………………..7
3.1.1 Mekanik Malzemeler…………………………………………………………………………………………7
3.2 Elektronik Tasarım……………………………………………………………………………………………………………7
3.2.1 CPU Seçimi………………….…..…………………..……………………………………………………………8
3.2.2 Kodlayıcı Seçimi…….…………….……………………………………………..……………………………..9
3.2.2.1 Mutlak Kodlayıcı………………………………………………………………………………………..9
3.2.2.2 Artımsal Kodlayıcı………………………………………………………………………………………9
3.2.3 Motor Seçimi……………..………………………………………………………………………………………9
4 ARABA-TERS SARKAÇIN MATEMATİKSEL MODELİ..……………………………………………………………….10
4.1 Sistemin Modellenmesi……………………………….…………………………………………………………………..10
4.1.1 Fiziksel Denklemlerle Modelleme………………….………………………………………………..10
4.1.1.1 Kuvvet Analizi ve Sistem Denklemleri………………….…………………………………..10
4.1.1.2 Lagrange Yöntemi ile Hareket Denklemi…………….……………………………………12
4.1.2 Sistemin Transfer Fonksiyonun Elde Edilmesi…………….…………………………………..12
4.1.3 Durum Uzay Modelinin Elde Edilmesi………………………….………………………………….13
5 ARABA-TERS SARKACIN KONTROL YÖNTEMİ………………………………………………………………………….14
5.1 Kontrol Sistemi………………………..…………………………………………………………………………………….14
5.2 Kontrol Sistemi Tanımı ve Amacı…………………………..……………………………………………………….14
5.3 Kontrol Sistemi Türleri……………………………………..……………………………………………………………15
5.3.1 Açık Çevrim Kontrol Sistemleri…………..………..…………………………………………………15
5.3.2 Kapalı Çevrim Kontrol Sistemleri…..……………..………………………………………………..15
5.4 Kontrol Yöntemi…………………….……………………………………………………………………………………..16
5.4.1 Sarkacın Yukarı Kaldırılması………………………….………………………………………………..16
5.4.2 Sarkacın Dengelenmesi…………………………………….……………………………………………16
6 SİSTEME UYGULANAN KONTROLLER……………………………………………………………………………………….17
6.1 PID Kontrol………….………………………………………………………………………………………………………..18
6.2 LQR Kontrol………….……………………………………………………………………………………………………….22
II
7
ARABA TERS SARKAÇ KONTROLÜ TASARIM VE UYGULMA.........................................................27
7.1 Mekanik Tasarım……………………………………………………………….………………………....................27
7.2 Elektronik Tasarım…………………………………………………………………………………………………………28
7.3 Kontrol Parametrelerinin Belirlenmesi……………..……………………………………………………………29
7.4 Kontrol Algoritması………………………….…………………………………………………………………………….31
7.5 Uygulama ve Gözlem…………………………………………………………..............................................32
SONUÇLAR………..............................................................................................................................33
KAYNAKÇA…….…………………..………………………………………………………………….…………………………………..34
III
ŞEKİLLER VE TABLOLAR LİSTESİ
Şekil 1.1
Şekil 1.2
Şekil 1.3
Şekil 1.4
Şekil 1.5
Şekil 2.1
Şekil 2.2
Şekil 3.1
Şekil 3.2
Şekil 3.3
Şekil 4.1
Şekil 5.1
Şekil 5.2
Şekil 5.3
Şekil 6.1
Şekil 6.2
Şekil 6.3
Şekil 6.4
Şekil 6.5
Şekil 6.6
Şekil 6.7
Şekil 6.8
Şekil 6.9
Şekil 6.10
Şekil 6.11
Şekil 7.1
Şekil 7.2
Şekil 7.3
Şekil 7.4
Şekil 7.5
Şekil 7.6
Şekil 7.7
Tablo 1.1
Tablo 2.1
Tablo 3.1
Robot Kolu Benzetimi………………………….………………………….…2
Vinç Sistemi………………...……..………………………....…………….…3
Segway Sistemi………………………………………….…….…....………...3
Ayakta Duran İnsan Modeli….……………………………………………….4
Füze Sistemi.………………………………………………………………….4
Araba-Ters Sarkaç Sistemi………………………….………………………...6
Araba-Ters Sarkaç Sisteminin Yapısı....….…………………………………..6
Araba-Ters Sarkaç Mekanik Modeli………….....……………………………7
Elektronik Tasarım Şeması……………….…………………………………..8
Arduino Due ve Teenst 3.6 Görüntüsü……….....……………………………8
Araba-Ters Sarkaç Modeli……………....…………………………………..10
Kontrol Sistemi………...……………………………………………………14
Açık Çevrim Kontrol Sistemin Genel Yapısı….…………………………….15
Kapalı Çevrim Kontrol Sistemi Genel Yapısı…….....…….……..………….15
Sistem Kontrol Şeması……………………….……...……………………....17
Basitleştirilmiş Sistem Kontrol Şeması……………………………………...17
Sarkacın Konumu Kp=1…..……………………………………..………..…...19
Sarkacın Konumu Kp=100…..…………………………………...……..……..19
Sarkacın Konumu Kp=100, Kd=20…………………………………...….……20
Araba Konum Kontrol Şeması………………………………………….…...20
Basitleştirilmiş Araba Konum Kontrol Şeması……………………………...20
Araba Konumu………………………………………………………….…...21
Tam Durum Geri Beslemeli Kontrol Şeması……………………….…….…22
LQR İle Araba Konumu ve Sarkaç açısı…………………………...……......25
LQR İle Arabanın Konumu ve Sarkaç Açısı………………………………...27
Araba Tasarımı………………………………………………………………27
Araba Ters Sarkaç Genel Yapısı…………………………………………….28
PCB Devresi…………………………………………………………………28
Baskı Devresi………………………………………………………………..29
Sistem Kontrol Şeması………………………………………………………29
Matlab PID Tuner Aracı……………………………………………………..30
Kontrol Akış Diyagramı.……………………………………………………..31
Arduino Due ve Teensy 3.6 Karşılaştırması…………………………………..8
Araba-Ters Sarkaç Modeli Tanımları……………..…………………………10
Sistem Parametreleri………………………………………………………....17
IV
SEMBOLLER
M
m
b
l
I
g
F
x
x
x
Arabanın Kütlesi
Sarkacın Kütlesi
Sürtünme Katsayısı
Sarkaç Uzunluğu
Sarkacın Kütle Atalet Momenti
Yerçekimi İvmesi
Uygulanan Kuvvet
Arabanın Konumu
Arabanın Hızı
Arabanın İvmesi
Sarkaç Açısı
Sarkaç Hızı
N
P
Sarkaç İvmesi
Yataydaki Kuvvetlerin Tepkisi
Dikeydeki Kuvvetlerin Tepkisi
Dikey Konumdaki Sarkacın Açısı
Dikey Konumdaki Sarkacın Hızı
Dikey Konumdaki Sarkacın İvmes
(s)
Sapma Açısının Fonksiyonu
U (s)
Girişin Transfer Fonksiyonu
X ( s)
Araba Konumunun Transfer Fonksiyonu
Ppend ( s )
Sarkaç Konumu
Pcart ( s)
Araba Konumu
C (s)
Kontroller
T (s)
T
d
f
Transfer Fonksiyonu
Tork
Kasnak Yarıçapı
Motorun Açısal Hızı
Frekans
Pmotor
Motor Gücü
V
KISALTMALAR
L
Lagrange Eşitliği
KE
Kinetik Enerji
PE
Potansiyel Enerji
KEM
Arabanın Kinetik Enerjisi
KEm
Sarkacın Kinetik Enerjisi
CPU
Merkezi İşlem Birimi
Max
Maksimum
PWM
Darbe Genişliği Modülasyonu
VI
ÖZET
Bu çalışmamızda kontrol teoremlerinin önemli problemlerinden biri olan doğrusal olmayan
ters sarkaç sisteminin mekanik ve elektronik tasarımları gerçekleştirilmiştir. Bu çalışmada
kontrol yöntemleri üzerinde durulmuştur.
Çalışmanın nihai amacı, araba üzerinde yer alan ters sarkacın dik pozisyonda tutulmasıdır.
VII
ABSTRACT
In this study; mechanical and electronic design of a non-linear inverted pendulum has been
done which is one of the outstanding problems in control theories. Furthermore, various control
theories were mentioned.
The ultimate aim of the study is to hold the pendulum in a vertical position which is mounted
on a cart.
VIII
1
GİRİŞ
1.1
Amaç
Bu çalışmada, aşağı konumdaki ters sarkaç sistemine belirli kontrol yöntemleri uygulanarak,
sarkacın yukarı dik konumda tutulması sağlanmıştır. Bu tezin amacı; kontrol teorilerinin klasik
problemlerinden olan ters sarkaç sisteminde belirli kontrol yöntemi uygulanarak, ters sarkaç
sistemi üzerindeki etkisi incelemektir. Ters sarkaç sistemi birçok gerçek sistemin temelini
oluşturduğundan, bu çalışmanın gerçekleştirilmesi birçok karmaşık sistemin gerçekleştirilmesi
bakımından oldukça önem arz etmektedir.
1.2
Literatürde Ters Sarkaç Sistemi
Sarkaç salınımları üzerine ilk araştırma 10.yüzyılda İbn-i Yunus tarafından yapılmıştır.
Yapılan çalışma diğer araştırmacıların da ilgisini çekmiştir. Galileo sarkacı zamanı ölçmek için
kullanmıştır. 17. Yüzyıl araştırmacılarından Newton, Hooke ve Huygens sarkaç salınımları
konusunda Galileo‘yu referans alarak çeşitli çalışmalar yapmıştır [1-3].
Literatürde, ters sarkaç sistemleri farklı yapılarda sınıflandırılabilmektedirler. Tek çubuklu ters
sarkaç sistemleri, döner ters sarkaç sistemleri ve çift çubuklu ters sarkaç sistemleri şeklinde
temel çeşitleri bulunmaktadır [4-10].
Ters sarkaç sistemlerine farklı kontrol yöntemleri uygulanarak sistemin kontrolü
sağlanmaktadır. Uygulanan temel kontrol yöntemleri; PID ve durum geri besleme, genetik
algoritma, yapay sinir ağları, enerji tabanlı, bulanık mantık, geri beslemeli doğrusallaştırma,
kayan kipli kontrol gibi temel kontrol yöntemleri uygulamaktadır [9,11-18].
Muskinja ve Tovornik [9] kontrol yöntemi olarak bulanık mantık ve enerji tabanlı kontrol
yöntemlerini kullanarak tek sarkaçlı sistemi kontrol etmişlerdir. Uyarlamalı kontrolör yapısını
sarkacın dengelenmesi için tavsiye etmişlerdir. Çalışmalarının sonucunda bulanık mantık
yönteminin enerji tabanlı yönteme göre daha avantajlı olduğunu belirtmişlerdir. Yazıcı ve
Karamancıoğlu [19] çalışmalarında farklı denetçiler tasarlayarak bunların performanslarını
karşılaştırmışlar. Elde edilen deney sonuçlarından gürbüzlük analizlerini yapmışlardır. Bugeja
[11] çalışmasında geri beslemeli doğrusallaştırma ve durum geri besleme yöntemlerini
kullanmıştır. Sarkacın yükseltilmesi için sistem enerjisi ve geri beslemeli doğrusallaştırma
yöntemlerini, sarkacın dengelenmesi için de durum geri besleme yöntemlerini kullanmıştır. Ji,
Lei ve Kin [12] çalışmalarında, bulanık mantık ile geliştirdikleri algoritmayı ters sarkaç
sistemine uygulamışlardır. Lozano ve arkadaşları [14] çalışmalarında enerji tabanlı kontrolör
tasarlayarak ters sarkaç sistemini kontrol etmişlerdir. Yamakita ve arkadaşları [20] çift sarkaç
sistemini yukarı kaldırılması ile ilgili problemi inceleyerek deneysel veri elde etmişlerdir.
Çalışmada geri beslemeli kontrol yöntemi kullanılarak dönel çift ters sarkaç sisteminin kontrolü
sağlanmıştır.
Chaio-Shiung Chen ve Wen-Liang Chen [21] çalışmalarında iki farklı model
kullanmışlardır. Bulanık mantık ile kayan kip denetimini ters sarkaç sistemine uygulamışlardır.
Pavol ve Martin [22] çalışmalarında PLC ve MATLAB Simulink kullanarak ters sarkaç
1
sistemini kontrol etmişlerdir. Sistemi enerji prensibi yöntemiyle kontrol etmişlerdir. MATLAB
Simulink ile üretilen kod PLC’ ye yüklenerek sistemin kontrolü sağlanmıştır. Kamen [23]
çalışmasında, farklı kontrolör kullanarak ters sarkaç sistemini kontrol etmiştir. Ayrıca PLC
kullanarak enerji yaklaşımı ile problemin çözümünü yapmıştır. Andrzej ve arkadaşları [24]
çalışmasında PLC S7-1200 kullanarak PWM ile ters sarkaç sistemini kontrol etmişlerdir.
Burada kontrol algoritması olarak sürücü programlanarak sistem kontrol edilmiştir.
1.3
Ters Sarkaç Sistemi Uygulama Alanları
Ters sarkaç sistemini anlayabilmek için verilebilecek en iyi örnek; bir kalem örneğidir.
Günlük hayatımızda çoğu kez kalemi parmağımızla dik konumda tutmaya çalışmışızdır.
Kalemi elimizle dik konumda kontrol etmeye çalıştığımızda zorlanacağımızı görmekteyiz.
Bunun nedeni ise kalem dengeleme işlemi ikinci dereceden doğrusal olmayan bir ters sarkaç
sistemine benzer olmasıdır.
Ters sarkaç sistemlerinin ilk kullanım alanlarından biri saatlerdir. Akrep ve yelkovan
zamana bağlı sarkaç benzetimleri yapılarak, sistem belirli hareket algoritmasıyla zamanı
ölçmemizi sağlamaktadır [1].
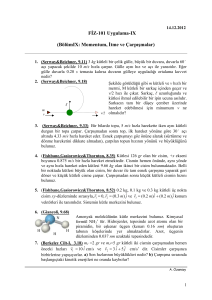
Robot kontrollerinde ters sarkaç sistemlerine rastlanmaktadır. Şekil 1.1’de robot kol
benzetimi yapılmıştır. Özellikle endüstriyel robot kollarında benzer sistem bulunmaktadır.
Şekil 1.1 Robot Kolu Benzetimi [25]
Atalet yer gösterici sistemlerin tasarımında kullanılır Schuler Metodu da ters sarkaç sistemi
benzetiminden ortaya çıkmıştır [1,26].
Ters sarkaç sisteminin başka bir uygulama alanı ise vinçlerdir. Şekil 1.2’de vince bağlı olan
yük hareket halinde sürekli salınım yapmaktadır. Ters sarkaç sistemine benzer kontrolör bu
sisteme uygulandığında bu sorun ortadan kalkmaktadır.
2
Şekil 1.2 Vinç Sistemi
Ters sarkaç sistemine benzer diğer bir uygulama alanı da Segway’lerdir. Ülkemizde ginger
olarak ta bilinmektedir. Bu sistemlerin kendilerinden dengeleyici mekanizması ters sarkaç
sistemine benzemektedir. Şekil 1.3’de Segway sistemi gösterilmiştir.
Şekil 1.3 Segway Sistemi [27]
Ters sarkaç sisteminin matematiksel modeli roketlerin yükselirken dikey olarak yükselişini
anlatan modele ve ayakta hareketsiz duran insan modeline benzemesinden dolayı bu sistemlere
uygulanmaktadır. Bu alanlara ek olarak uydu sistemlerinde, uçak sistemlerinde, gemi
dengeleme sistemlerinde ve nükleer yakıt çubuklarının dengelenmesi gibi birçok
uygulamalarda kullanılır [1,13].
3
Şekil 1.4 Ayakta Duran İnsan Modeli [28]
Şekil 1.5 Füze Sistemi [29]
2
PROJENİN TANIMI
2.1
Ters Sarkaç Sistemi
Ters sarkaç, kontrol mühendisliği alanında kullanılan en popüler ölçütlerden biridir. Kontrol
teorisinin temellerini öğretmek maksadıyla kullanılan eğitim amaçlı bir sistem olmasının yanı
sıra; kontrol tekniklerinin üzerinde test edilebileceği iyi bir mekanizmadır. Ters sarkaç sistemi
aynı zamanda iyi bilinen bir eksik tahrikli mekanik sistem (underactuated mechanical system,
UMS) örneğidir. Eksik tahrikli mekanik sistemler robotik alanında yaygın bir şekilde kullanılır
ve bu sistemlerin temel özelliği, serbestlik derecesinden daha az sayıda eyleyiciye sahip
olmalarıdır [30]. Ters sarkaç kararsız ve doğrusal olmayan bir yapıya sahiptir. Bu yapısından
ötürü oldukça ilgi çekici bir sistemdir ve kontrol mühendisliği çalışmalarında sıklıkla ele
alınmaktadır. Ters sarkacı daha ilgi çekici hale getiren bir diğer önemli özelliği ise
depremölçerler, insansı robotlar, uçaklar ve roketler gibi birçok yeni teknolojinin temelini
oluşturmasıdır [30]. Ters sarkaç sistemi bir girişe ve iki çıkışa sahiptir; sistemin tek girişi kuvvet
olup, çıkışları sarkaç açısı ve sarkacın bağlı olduğu arabanın pozisyonudur. Bu yüzden ters
sarkaç, tek giriş çok çıkışlı (single-input multiple-output, SIMO) bir sistem örneğidir [30].
4
Literatürde birbirinden farklı birçok ters sarkaç yapısı ile karşılaşılabilir.
Bunlar:
Çift ters sarkaç
Döner tek kollu sarkaç
Araba-ters sarkaç
Daha az popüler olan ters sarkaç yapıları ise:
Dörtlü ters sarkaç
Paralel tipte çift ters sarkaç
3 boyutlu ya da küresel sarkaç
Döner iki bağlantılı sarkaç
Üçlü ters sarkaç
Literatürde ters sarkaç ile ilgili birçok çalışma bulunmaktadır. Bu çalışmaların çoğu ters
sarkacın stabilizasyonu yani sarkacın yukarı konumda dengede tutulması ile ilgilidir. Doğrusal,
doğrusal olmayan ve akıllı kontrol yöntemlerinden oluşan çeşitli teknikler ters sarkaç sistemine
uygulanmıştır [30].
Bunlar:
Oransalintegral-türev (proportional-integral-derivative, PID)
Doğrusal kuadratik regülatör (linear quadratic regulator, LQR)
kontrol metotları, ters sarkaç sistemine uygulanan temel doğrusal kontrol yaklaşımlarıdır [30].
Kayan kipli kontrol (sliding mode control, SMC) ve geri adımlamalı kontrol yaklaşımları, ters
sarkacın stabilizasyonu için yaygın olarak kullanılan doğrusal olmayan kontrol yöntemleridir.
Uyarlamalı sinirsel bulanık çıkarım sistemi (adaptive neuro fuzzy inference system, ANFIS),
yapay sinir ağları, genetik algoritmalar ve bulanık mantık gibi akıllı kontrol yaklaşımları da
sarkacın dikey (ters) konumda dengede tutulması için kullanılmaktadır [30]. Yukarıda verilen
referanslardan da anlaşılacağı üzere, sarkacın kararsız, dikey (ters) konumda dengede
tutulabilmesi için birçok kontrol tekniği kullanılmıştır [30].
2.2
Araba-Ters Sarkaç Sistemi
Araba-ters sarkaç sistemi dengesiz, yüksek mertebede, çok değişkenli ve yüksek derecede
eşleşmiş ve harekete geçirilmiş doğrusal olmayan kontrol probleminin klasik bir örneği olarak
ele alınabilecek sistemdir. Araba- ters sarkaç sistemi Şekil 2.1’de gösterilmektedir.
5
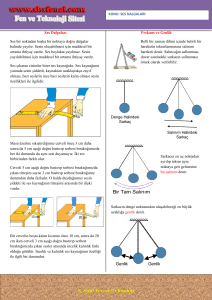
2.3 Araba-Ters Sarkaç Sistemin Yapısı
Araba-ters sarkaç sisteminde bir araba ve ona bağlı bir tane sarkaç kolu bulunmaktadır.
Araba ray boyunca hareket edebilmekte ve ona bağlı sarkaç kolları da serbestçe
dönebilmektedir. Sistem, arabaya bağlı bir kemeri çekerek arabanın ileri geri hareket etmesini
sağlayan bir dc motora sahiptir. Arabanın hareket ettirilmesi sarkaç kolunun salınım yapmasına
neden olmaktadır. Araba-ters sarkaç sisteminin yapısı Şekil 2.1’de gösterilmektedir.
Şekil 2.1 Araba-Ters Sarkaç Sistemi
Arabaya uygulanan kuvvetin değeri dc motora uygulanan voltajın değerinin değiştirilmesi
ile ayarlanmaktadır. Sarkacın açısal konumunu ve ray üzerindeki arabanın pozisyonunu
belirlemek için sistemde iki adet optik kodlayıcı kullanılmıştır. Sarkaç açısı ve araba konumu
verileri kullanılarak dc motora uygulanan kontrol voltajının değeri ayarlanabilir ve böylece, ters
sarkaç stabilizasyonu gerçekleştirilebilir [30]. Şekil 2.2’de araba-ters sarkaç sisteminin yapısı
gösterilmiştir.
Şekil 2.2 Araba-Ters Sarkaç Sisteminin Yapısı
6
3
ARABA-TERS SARKAÇ SİSTEM TASARIMI
3.1
Mekanik Tasarım
Şekil 3.1 Araba-Ters Sarkaç Mekanik Modeli
Şekil 3.1’de gösterildiği gibi motorun miline bağlı olan kasnağın dönmesi ile arabaya bağlı
olan kayışın hareketine bağlı olarak sarkacın dikey pozisyonda tutulması amaçlanmıştır.
3.1.1 Mekanik Malzemeler
Mekanik tasarımda kurulmak istenen sistemin malzeme seçimi ve imalat yöntemi sistemin
düzgün çalışmasında büyük rol oynamaktadır.
Sistemde kullanılacak malzemeler:
3.2
Mil
Mil Tutacağı
Kayış-Kasnak
Araba
Sarkaç ve Kütlesi
Sistemin Platformu
Elektronik Tasarım
Aşağıdaki Şekil 3.2’de gösterildiği gibi arabanın konum ve sarkaç açısı bilgisinin CPU
tarafından derlenerek motor sürücüsüne PWM sinyali üreterek arabaya motor aracılığıyla bir
kuvvet uygulanmaktadır. Elektronik sistemde CPU frekansı, kodlayıcı çözünürlüğü ve motor
gücü seçimi büyük ölçüde önemlidir.
7
CPU
ARABA
KONUMU
VE
SARKAÇ
AÇISI
MOTOR
SÜRÜCÜ
ARABA
MOTOR
Şekil 3.2 Elektronik Tasarım Şeması
3.2.1 CPU Seçimi
Bu projede CPU seçimi esnasında en çok dikkat edilmesi gereken parametre CPU
frekansıdır. Şekil 3.3’de Arduino Due ve Teensy 3.6 gösterilmiştir. Tablo 1’de Arduino Due ile
Teensy 3.6 karşılastırılmıştır.
Şekil 3.3 Arduino Due ve Teenst 3.6 Görüntüsü
Özellikler
Arduino Due
Teensy 3.6
CPU Mimarisi
32-bit ARM Cortex M3
32-bit ARM Cortex M4
CPU Frekansı
Max 84 MHz
Max 180 MHz
RAM
96 KB
256 KB
Programlama
Arduino IDE-C Tabanlı
Arduino IDE-C Tabanlı
Tablo 1.1 STM32F4 Discovery ve Teensy 3.6 Karşılaştırması
Tablo 1’de anlaşılacağı gibi Teensy 3.6 CPU frekansı ve kolaylıkla programlama açısından
Arduino Due’ye kıyasla daha iyi olduğu görülmektedir.
8
3.2.2 Kodlayıcı Seçimi
CPU frekansının önemli olduğu kadar kodlayıcı seçimi de büyük ölçüde önemlidir. Temelde
iki çeşit kodlayıcı vardır ve bunlar; mutlak kodlayıcı ve artımsal kodlayıcıdır [31].
3.2.2.1 Mutlak Kodlayıcı
Mutlak kodlayıcıya güç verildiği anda dönen mile göre dijital bit dizileri şeklinde birbirine
benzemeyen çıkışlar vererek konumu belirler. Enerji kesilse dahi en sonraki konumunda kalır
ve tekrar enerjilendiğinde kaldığı konumdan işlemine devam eder [31].
3.2.2.2 Artımsal Kodlayıcı
Dönen mil için sürekli kare sinyal üreterek bulunduğu konumu bilgilendirmede ve sayma
işlemlerinde kullanılır. Bu tip kodlayıcı mutlak kodlayıcılardan farkı enerjilendikleri andan
itibaren bulunduğu konumu 0 olarak kabul eder ve bu değerin üstüne işlem yapar. Bu tip
kodlayıcırlar endüstriyel robotlar, CNC tezgâhlarda, antenler, medikal cihazlar, paketleme
makinaları, deri işleme makinaları, şişeleme makinalarında vb. alanlarda kullanılır [31].
Kodlayıcı seçiminde ayrıca dikkat edilecek hususlar şunlardır:
Çözünürlüğü: Kodlayıcının her dönüşte üretilen puls(kare sinyal) sayısı öğrenilmeli
Besleme Gerilimi: 5VDC, 5-30VDC, 11-24VDC vb.
Çıkış Gerilimi: besleme geriliminden farklı çıkış gerilimi veren kodlayıcılar vardır. Bu
yüzden kullanacağımız cihaza göre çıkış gerilimi önemlidir.
Referans Çıkışının Genliği
Fiziksel Özellikler Gövde Çapı / Gövde Uzunluğu
Malzemesi: ABS, alüminyum, çelik vb. tamamen çalışma ortam koşullarına bağlı
olarak.
Milli mi? / Delik milli mi?
Bağlantılar(Kablolu / Soketli)
Soket / Kablo Çıkış Yönü (Eksenel / Yandan Çıkışlı)
Soket Tipi / Kablo Damar Sayısı ve Uzunluğu
Koruma Sınıfı
3.2.3
Motor Seçimi
Arabaya uygulanacak maksimum kuvvet belirlendikten sonra bu kuvveti sağlayacak motor
seçimi diğer sistem bileşenleri kadar önemlidir. Aşağıdaki eşitliklerden faydalanarak motor
seçimi yapılır.
𝑇=𝐹𝑥𝑑
(1)
(2)
(3)
=2𝑥𝜋𝑥𝑓
Pmotor Tx
9
4
ARABA-TERS SARKACIN MATEMATİKSEL MODELİ
4.1
Sistemin Modellenmesi
Araba istenen bir yörüngeyi takip ederken sarkacın dik konumda dengede tutulabilmesi için
araba-ters sarkaç sisteminin modellenmesi gerekmektedir. Araba-ters sarkaç sistemlerinin
modellenmesi genellikle iki yaklaşıma dayanmaktadır: Fiziksel denklemleri kullanarak
modelleme ve Matlab Sistem Tanımlama Aracı kullanarak modelleme.
Araba-ters sarkaç sistemindeki semboller ve tanımları Tablo 2.1’de gösterilmektedir.
Tanımları
Arabaya Uygulanan Fiziksel Kuvvet
Arabanın Kütlesi
Sarkacın Kütlesi
Sürtünme Katsayısı
Sarkaç Açısı
x
Arabanın Konumu
Tablo 2.1 Araba-Ters Sarkaç Modeli Tanımları
Semboller
F
M
m
b
4.1.1 Fiziksel Denklemlerle Modellenme
Yaygın olarak kullanılan ilk yaklaşım, sistemlerin fiziksel denklemlerine dayanmaktadır. Bu
yaklaşımda, hem sarkaç açısına hem de araba konumuna ait transfer fonksiyonlarını elde
etmede fiziksel yasalar kullanır. Şekil 4.1’de araba-ters sarkaç sistemi gösterilmiştir.
Şekil 4.1 Araba-Ters Sarkaç Modeli
4.1.1.1 Kuvvet Analizi ve Sistem Denklemleri
Arabadaki kuvvetleri yatay yönde toplayarak aşağıdaki hareket denklemini elde ederiz [32].
(4)
M x +𝑏x +𝑁 =𝐹
Sarkacın yatay yöndeki kuvvetleri toplayarak tepki kuvvetini aşağıdaki gibi elde ederiz [32].
𝑁 = 𝑚 x + 𝑚𝑙 𝑐𝑜𝑠 − 𝑚𝑙 𝑠𝑖𝑛
2
(5)
10
Tepki kuvveti olan N ’i (3)’de yerine yazacak olursak aşağıdaki ana hareket denklemini elde
ederiz [32].
(𝑀 + 𝑚) x + 𝑏 x + 𝑚𝑙 𝑐𝑜𝑠 − 𝑚𝑙 𝑠𝑖𝑛 = 𝐹
2
(6)
Bu sisteme ait ikinci hareket denklemini elde etmek için sarkaca dik olan kuvvetleri toplamamız
gerekir. Sistemi bu eksen boyunca çözmek matematiği büyük ölçüde basitleştirir ve aşağıdaki
eşitliği elde ederiz [32].
𝑃𝑠𝑖𝑛 + 𝑁𝑐𝑜𝑠 − 𝑚𝑔𝑠𝑖𝑛 = 𝑚𝑙 + 𝑚 x 𝑐𝑜𝑠
(7)
(7)’teki P ve N terimlerinden kurtulmak için sarkacın merkezine göre moment alarak
aşağıdaki eşitliği elde ederiz [32].
−𝑃𝑙𝑠𝑖𝑛 − 𝑁𝑙𝑐𝑜𝑠 = 𝐼
(8)
(7) ve (8)’i birleştirerek ikinci ana hareket denklemini aşağıdaki gibi elde ederiz [32].
(𝐼 + 𝑚 l 2 ) + 𝑚𝑔𝑙𝑠𝑖𝑛 = −𝑚𝑙 x 𝑐𝑜𝑠
(9)
Bu projede kullanacağımız analiz ve kontrol tasarım yöntemleri sadece lineer sistemlere
uygulandığından, bu denklem setini doğrusallaştırmak gerekir. Spesifik olarak, dikey
doğrultuda denge konumu ile ilgili denklemleri doğrusallaştıracağız ve sarkacın dikey
konumunu referans alacağız. = π bu varsayım makul şekilde geçerli olmalıdır çünkü kontrol
altında sarkacın dikey olarak yukarı konumdan 20 dereceden fazla sapma yapmamasını
istiyoruz. Sarkacın denge konum sapmasını, yani = π + olduğunu gösterelim. Yine
dengeden küçük bir sapma ( ) varsayarak, lineer olmayan fonksiyonların aşağıdaki
denklemlerimizde küçük açı yaklaşımlarını sistem kullanabiliriz [32]:
𝑐𝑜𝑠 = cos(𝜋 + ) ≅ −1
(10)
𝑠𝑖𝑛 = sin(𝜋 + ) ≅ −
(11)
= 2 ≅ 0
(12)
2
Yukarıdaki yaklaşımları doğrusal olmayan ana denklemlerimize yerleştirdikten sonra iki
doğrusal hareket denklemi elde ediyoruz [32].
Not: F kuvveti u giriş olarak verildi.
(𝐼 + 𝑚 l 2 ) − 𝑚𝑔𝑙 = 𝑚𝑙 x
(13)
(𝑀 + 𝑚) x + 𝑏 x + 𝑚𝑙 = 𝑢
(14)
11
4.1.1.2 Lagrange Yöntemi İle Hareket Denklemi
Sistemin dinamik denklerinin çıkarılması için enerji tabanlı Lagrange yönteminden de
faydalanır. Lagrange denklemi kinetik ve potansiyel enerjileri arasındaki fark olarak
tanımlanırsa;
L KE PE
(15)
Öncelikle toplam kinetik enerji elde edilmektedir. Toplam kinetik enerji arabanın ve
sarkacın kinetik enerjilerinin toplamından oluşmaktadır.
KE KEM KEm
KE
(16)
1
1
( M m) x 2 m(2 xl cos l 2 2 )
2
2
(17)
Toplam potansiyel enerji aşağıdaki denklemdeki gibi elde ederiz.
PE mgl cos
(18)
(17),(18) ve (15)’de yerine yazacak olursak Lagrange eşitliği aşağıdaki gibi olur.
L
1
1
( M m) x 2 m(2 xl cos l 2 2 ) mgl cos
2
2
(19)
Ana hareket denklemi oluşturmak için aşağıdaki eşitlikten faydalanırız.
L L
Q
t q q
(20)
(17)’deki işlemi gerçekleştirdiğimizde (6) ve (14)’deki eşitlikleri elde ederiz.
4.1.2 Sistemin Transfer Fonksiyonun Elde Edilmesi
Doğrusallaştırılmış sistem denklemlerinin transfer fonksiyonlarını elde etmek için önce sıfır
başlangıç koşulunu varsayarak sistem denklemlerinin Laplace dönüşümünü almalıyız. Elde
edilen Laplace dönüşümleri aşağıda gösterilmiştir [32].
(𝐼 + 𝑚 l 2 ) ( s ) s 2 − 𝑚𝑔𝑙 ( s ) = 𝑚𝑙 X ( s) s 2
(21)
(𝑀 + 𝑚) X ( s) s 2 + 𝑏 X ( s) 𝑠 − 𝑚𝑙 ( s ) s 2 = U ( s )
(22)
12
Bir transfer fonksiyonunun bir seferde tek bir giriş ile tek bir çıkış arasındaki ilişkiyi temsil
ettiğini hatırlayarak yukarıdaki eşitlikte transfer fonksiyonunu bulmak için çıkış ( s ) ve bir
girdi U ( s ) elde etmemiz gereken X ( s) aşağıda mevcuttur [32].
I ml 2 g
X ( s)
2 ( s)
s
ml
(23)
Ardından yukarıdakileri ikinci denklemde kullanarak.
I ml 2 g
I ml 2 g
(𝑀 + 𝑚 )
2 ( s) s 2 + 𝑏
2 ( s) 𝑠 − 𝑚𝑙 ( s ) s 2 = U ( s )
s
s
ml
ml
(24)
Yeniden düzenlersek transfer fonksiyonu aşağıdaki gibidir.
(s)
U (s)
𝑚𝑙
𝑞
=
b(𝐼+𝑚
s4 +
l2)
𝑞
s2
(25)
s 3 −(𝑀+𝑚)𝑚𝑔𝑙
s 2 −𝑏𝑚𝑔𝑙
s
𝑞
𝑞
𝑞 = [(𝑀 + 𝑚) (𝐼 + 𝑚 l 2 ) − ( ml ) 2 ]
(26)
Yukarıdaki transfer fonksiyonundan, başlangıçta hem kutup hem de sıfır olduğu görülebilir.
Bunlar iptal edilebilir ve transfer fonksiyonu aşağıdaki gibi olur [32].
Ppend ( s) =
(s)
U (s)
𝑚𝑙
𝑞
=
b(𝐼+𝑚
s3 +
l2)
𝑞
X ( s)
U (s)
(27)
s 2 −(𝑀+𝑚)𝑚𝑔𝑙
s −𝑏𝑚𝑔𝑙
𝑞
𝑞
(𝐼+𝑚
Pcart ( s) =
s
l 2 ) s 2 −𝑚𝑔𝑙
𝑞
=
b(𝐼+𝑚
s4 +
𝑞
l
2
)
(28)
s 3 −(𝑀+𝑚)𝑚𝑔𝑙
s 2 −𝑏𝑚𝑔𝑙
s
𝑞
𝑞
4.1.3 Durum Uzay Modelinin Elde Edilmesi
Yukarıdan hareketin doğrusallaştırılmış denklemleri, bir birinci dereceden diferansiyel
denklem dizisine yeniden düzenlenirlerse durum-uzay formunda da temsil edilebilir.
Denklemler doğrusal olduğu için, aşağıda gösterilen standart matris formuna konulabilir [32].
13
x
x
0
0
=
0
0
1
0
( I ml 2 )b
I ( M m) Mml 2
0
mlb
I ( M m) Mml 2
m 2 gl 2
I ( M m) Mml 2
0
mgl ( M m)
I ( M m) Mml 2
0
0
1
0
0
2
x
I ml
x
2
+ I ( M m) Mml u
0
ml
2
I ( M m) Mml
x
1 0 0 0 x 0
y
u
0 0 1 0 0
5
(29)
(30)
ARABA-TERS SARKACIN KONTROL YÖNTEMİ
5.1 Kontrol Sistemi
Bu bölümde kontrol sistemleri hakkında genel bilgiler verilmiştir. Kontrol sistemlerinin
amacı, sınıflandırılması ve geçmişten günümüze denetim sistemlerinin gelişimi hakkında temel
bilgiler verildikten sonra bir sonraki bölüm olan kontrol yönetimi kısmında, tez çalışmasındaki
denetim sistemi hakkında detaylı bilgiler verilecektir [33].
5.2 Kontrol Sistemi Tanımı ve Amacı
Kontrol sistemi, kendisini veya başka bir sistemi yönetmek, yönlendirmek veya kumanda
etmek için belirli fiziksel elemanların bir arada bulunarak ilişkilendirilmesidir.
Kontrol sistemleri üç temel ögeden oluşmaktadır. Bunlar; kontrolün amaçları, kontrol
sistemi temel ögeleri ve sonuç ya da çıkışlardır. Bunların birbiriyle olan ilişkisi Şekil 5.1’de
gösterildiği gibi amaçlar, girişler ile belirlenmektedir. Sonuçlar ise çıkışları ya da kontrol edilen
değişkenleri etkilemektedir. Şekil 5.1’e bakılarak kontrol sisteminin amacı, kontrol sistemi
elemanları aracılığıyla girişleri uygun parametrelerle kullanarak, çıkışları kontrol etmektir [33].
Şekil 5.1 Kontrol Sistemi
Kontrol sistemleri gündelik yaşantımızda birçok yerde kullanılmaktadır. Otomatik kapı
sistemleri, oda sıcaklığını sabit tutmak için tasarlanan sıcaklık sabitleyicileri, makinalardaki
zamanlayıcılar ve ışığa veya sese duyarlı elektronik devreler kontrol sistemlerine örnek
verilebilirler [33].
14
5.3 Kontrol Sistemleri Türleri
Bir çalışma farklı kontrol yöntemleriyle aynı işi yapacak şekilde tasarlanabilmektedir.
Yapılacak çalışmaya göre kontrol sistemlerinin seçilmesi avantaj sağlayacaktır. Çünkü bir
çalışma farklı kontrol türleriyle gerçekleştirilebilir ama yapılan çalışmaya göre seçilen belirli
kontrolör sistemi diğer kontrolör türlerine göre daha verimli sonuçlar verebilmektedir.
Çıkış işaretlerinin denetlenmesi bakımından kontrol sistemleri açık çevrim denetim
sistemleri ve kapalı çevrim denetim sistemleri şeklinde sınıflandırılırlar [33].
5.3.1 Açık Çevrimli Kontrol Sistemleri
Açık çevrim kontrol sistemine geri beslemesiz kontrol sistemi de denmektedir. Bu kontrol
sisteminde, sistemin çıkış cevabına bakılmadan sistem kontrol edilmektedir. Açık çevrimli
kontrol sistemleri, Denetleyici (kontrolör) ve Sistem’den oluşmaktadır. Şekil 5.2’de gösterildiği
gibi denetleyiciye referans girişi uygulanmaktadır. Uygulanan girişe uygun olarak bir çıkışı
elde edilmektedir. Şekilde görüldüğü üzere çıkışın girişten bağımsız olduğu kontrol sistemi
türüdür. Açık çevrimli kontrol sistemlerinin basit ve ekonomik olmaları nedeniyle karmaşık
olmayan birçok sistemde rastlamak mümkündür [33].
Şekil 5.2 Açık Çevrim Kontrol Sistemin Genel Yapısı
5.3.2 Kapalı Çevrim Kontrol Sistemi
Kapalı çevrimli sistemler geribeslemeli kontrol sistemleridir. Geribesleme, sistem çıkışı ve
girişi arasındaki hataları azaltmak amacıyla sistemde kullanılmaktadır. Şekil 5.3’te görüleceği
üzere geribesleme sistemdeki hatanın azaltılmasında önemli bir katkı sunmaktadır.
Geribeslemenin sistemdeki hatanın azaltılmasında etkisi bulunmamaktadır aynı zamanda
sistemdeki kararlılığa, toplam kazanca, bozucu ve duyarlılığa da etkisi bulunmaktadır [33].
Şekil 5.3 Kapalı Çevrim Kontrol Sistemi Genel Yapısı
15
5.4 Kontrol Yöntemi
Bu çalışmada, kontrol algoritması iki farklı temel yöntem üzerine kurulmuştur. Bunlardan
birincisi sarkacın yukarı kaldırılması işlemi için kullanılan konum kontrollü stratejik araba
hareketi yöntemidir. Bu yöntem sayesinde aşağı konumdaki sarkaca belirli hareketler ile enerji
eklenerek sarkaç yukarı kaldırılmıştır. İkinci Yöntem ise sarkacın dik konumda dengelemeye
yönelik yöntemdir.
5.4.1 Sarkacın Yukarı Kaldırılması
Sarkacın yukarı kaldırılma işlemi için birçok yöntem bulunmaktadır. Bunlar; stratejik araba
hareketleriyle sarkacın yukarı kaldırılması, bulanık mantık yöntemi ve enerji kontrol yöntemi
en temel yöntemlerdir. Nenad ve Boris [9] çalışmalarında hem bulanık mantık yöntemini hem
de enerji kontrolü yöntemi kullanarak sarkacı yukarı kaldırmışlardır. Çalışmalarında bulanık
mantık kontrol yönteminde elde edilen deney sonuçların enerji kontrol yönteminden daha iyi
olduğu gözlenmiştir. Radhamohan ve arkadaşları [34] çalışmalarında bulanım mantık
yöntemiyle sarkacı yukarı kaldırmışlardır. Bu yöntemde matematiksel modelden faydalanılarak
enerjiyi bulanık mantık yöntemiyle kontrol ederek sarkaç yukarı kaldırılmıştır. Kizir ve
arkadaşları [35] çalışmalarında üç yöntemi de kullanarak sarkacın yukarı kaldırılması
sağlanmıştır. Nundrakwang ve arkadaşları [17] PD konum kontrollü bir denetçi kullanarak
sarkacı yukarı kaldırmışlardır [33].
5.4.2 Sarkacın Dengelenmesi
Sarkacın denge noktasında tutulma işlemleri birçok farklı işlemle yapılabilmektedir.
Literatürde sarkacın dengelenmesinde farklı kontrolör yöntemleri bulunmaktadır. Bunlar;
bulanık mantık, tam durum geribesleme ve PID kontrol yöntemleridir. Er [36] çalışmasında
sarkacın dengelenmesinde, PID kontrol yöntemini, tam durum geribeslemeli kontrol yöntemini
ve doğrusal kuadratik düzenleyicisi (LQR) kontrol yöntemlerini kullanmıştır. Bu kontrol
yöntemlerinden PID kontrol yöntemi hariç diğer kontrol yöntemleri matematiksel modele
ihtiyaç duymaktadırlar. Mohammadbagheri ve Yaghoobi [37] çalışmalarında sarkacın
dengelemesinde PID kontrolör yöntemini kullanmışlardır [33].
16
6.
SİSTEME UYGULANAN KONTROLLER
Sisteme uygulanacak kontrol parametreleri aşağıdaki Tablo 2.1’de mevcuttur.
Parametreler
Arabanın Kütlesi (M)
Değerler
0.5
Birimler
kg
Sarkacın Kütlesi (m)
0.2
kg
Sürtünme Katsayısı (b)
Kütle Atalet Momenti (I)
0.1
0.006
-
Yerçekimi İvmesi (g)
9.8
Sarkaç Uzunluğu (l)
0.3
Tablo 3.1 Sistem Parametreleri
kg.m2
m / s2
m
Bu problem için kontrol cihazının yapısı, alışkın olabileceğiniz standart kontrol
problemlerinden biraz farklıdır. İlk bozucu etkenden sonra dikeye dönmesi gereken sarkaç
konumunu kontrol etmeye çalıştığımızdan, takip ettiğimiz referans sinyali sıfır olmalıdır. Bu
tür durumlara genellikle düzenleyici problem denir. Arabaya uygulanan dış kuvvet, itici bir
bozucu olarak kabul edilebilir. Şekil 6.1’de sistem kontrol şeması gösterilmiştir [32].
Şekil 6.1 Sistem Kontrol Şeması
Şekil 6.2’de basitleştirilmiş sistem kontrol şeması gibi yeniden düzenlersek, bu sistemin
analizini ve tasarımını daha kolay bulabiliriz.
Şekil 6.2 Basitleştirilmiş Sistem Kontrol Şeması
17
Kapalı devre sistemi için ortaya çıkan transfer fonksiyonu T ( s ) , F bir kuvvet girişinden
sarkaç açısının çıkışına kadar, (31) ile belirlenir.
T ( s)
6.1
( s)
F (s)
Ppend ( s )
(31)
1 C ( s ) Ppend ( s )
PID Kontrol
Bu kapalı döngü transfer fonksiyonu, aşağıdaki kodu m-file sonuna kopyalayarak
MATLAB'da modellenebilir. Özellikle, denetleyicimizi MATLAB içindeki PID nesnesini
kullanarak tanımlıyoruz. Daha sonra, geri besleme komutunu, yukarıdaki şekilde gösterildiği
gibi, bozulma kuvvetinin F girdi olduğu ve sarkaç açısının dikeyden sapmasının çıktı
olduğu şekilde gösterildiği gibi kapalı döngü transfer fonksiyonunu T ( s ) üretmek için
kullanırız [32].
Şimdi denetleyicimizi ayarlamaya başlayabiliriz. Öncelikle, bu ilk kontrol kazanımları seti
için kapalı devre sistemin tepkisini dürtüsel bir bozulmaya karşı inceleyelim [32]. Şekil 6.3’de
sarkacın konumu Kp=1 iken sarkaç açısı göstrilmiştir.
M = 0.5;
m = 0.2;
b = 0.1;
I = 0.006;
g = 9.8;
l = 0.3;
q = (M+m)*(I+m*l^2)-(m*l)^2;
s = tf('s');
P_pend = (m*l*s/q)/(s^3 + (b*(I + m*l^2))*s^2/q - ((M +
m)*m*g*l)*s/q - b*m*g*l/q);
Kp = 1;
Ki = 1;
Kd = 1;
C = pid(Kp,Ki,Kd);
T = feedback(P_pend,C);
t=0:0.01:10;
impulse(T,t)
axis([0, 2.5, -0.2, 0.2]);
title({'Sarkacın Açısı'; PID Kontrol: Kp = 1, Ki = 1, Kd =
1'});
18
Şekil 6.3 Sarkacın Konumu Kp=1
Şekil 6.3’de sarkacın konumu Kp=1 iken cevap hala kararlı değil. Orantılı kazancı artırarak
yanıtı değiştirmeye başlayalım. Cevap üzerindeki etkisinin ne olduğunu görmek için Kp
değişkeni artırın ve m-file dosyanızı şu şekilde değiştirirseniz Kp=100. Komut penceresinde
çalıştırın, Şekil 6.4’deki sarkacın konumu Kp=100 iken sarkaç açısı gösterilmiştir [32].
Şekil 6.4 Sarkacın Konumu Kp=100
Spesifik olarak, cevabın yerleşme süresi, 5 saniye gerekenden daha az olan 1.64 saniye
olarak belirlenir. Kararlı durum hatası yeterince hızlı bir şekilde sıfıra yaklaştığından, ek bir
integral işlem gerekmez. Bazı integral kontrolünün gerekli olduğunu kendiniz görmek için
integral kazancı sabitini Ki sıfıra ayarlayabilirsiniz. Bununla birlikte, en yüksek tepkime 0.05
radyan gereksiniminden daha büyüktür. Türev kontrolün miktarını artırarak aşmanın sıklıkla
azaltılabileceğini hatırlayalım. Bazı deneme yanılmalarından sonra Kd = 20 türev kazancının
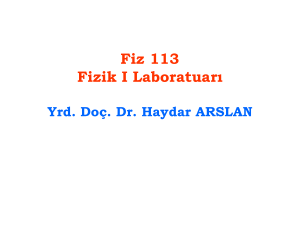
tatmin edici bir cevap sağladığı bulunmuştur [32]. Şekil 6.5’te sarkacın konumu Kp=100,
Kd=20 iken sonuç sarkaç açısı gösterilmiştir.
19
Şekil 6.5 Sarkacın Konumu Kp=100, Kd=20
Gördüğünüz gibi, sarkaç dikeyden 0,05 radyandan daha fazla hareket etmeyecek şekilde
düşürüldü. Verilen tasarım gerekliliklerinin tümü yerine getirildiğinden, başka bir yinelemeye
gerek yoktur [32].
Arabasının pozisyonunu temsil eden blok dâhil edilmedi çünkü bu değişken kontrol
edilmedi. Sarkacın açısının bulunduğu blokta arabanın konumuna ne olduğunu görmek
mümkün değildir. Bu nedenle Şekil 6.6’daki kontrol şemasını uygulamak gerekir [32].
Şekil 6.6 Araba Konum Kontrol Şeması
Yeniden düzenlemek gerekirse;
Şekil 6.7 Basitleştirilmiş Araba Konum Kontrol Şeması
20
Şekil 6.7’de basitleştirilmiş araba konum kontrol şeması, blok sarkaç dikey tutmak için
tasarlanmış C ( s ) kontrol sistemidir. Kapalı döngü transfer fonksiyonu T ( s ) , arabaya
uygulanan bir giriş kuvvetinden araba pozisyonunun (32) verilmektedir [32].
Pcart
Pcart ( s)
X ( s)
F (s) 1 Ppand (s)C ( s)
(32)
M-dosyanıza aşağıdaki komutların eklenmesi ( Ppend ( s ) ve C ( s ) tanımlanmış varsayarak),
arabanın pozisyonunun düşündüğümüz aynı itici kuvvete tepkisini oluşturacaktır [32].
P_cart = (((I+m*l^2)/q)*s^2 - (m*g*l/q))/(s^4 + (b*(I +
m*l^2))*s^3/q - ((M + m)*m*g*l)*s^2/q - b*m*g*l*s/q);
T2 = feedback(1,P_pend*C)*P_cart;
t = 0:0.01:5;
impulse(T2, t);
title({'Araba Konumu';'PID Kontrol: Kp = 100, Ki = 1, Kd =
20'});
Şekil 6.8 Araba Konumu
Şekil 6.8’de araba konumu, araba yaklaşık sabit hızla negatif yönde hareket eder. Bu
nedenle, PID kontrol cihazı sarkacın açısını kararlı hale getirilmesine rağmen, konumunu
kararlı hale gelmemektedir.
21
6.2
LQR Kontrol
Ana problemden, ters sarkaç sisteminin durum-uzay formundaki dinamik denklemleri şöyledir:
1
0
x 0
x 0 0.1818 2.6727
=
0
0
0
0 0.4545 31.1818
x
1 0 0 0 x 0
y
u
0 0 1 0 0
0
0
1
0
x 0
x 1.1818
u
+
0
4.5455
(33)
(34)
Bu problem için çıktılar, arabanın yer değiştirmesi x (metre cinsinden) ve sarkacın
konumunun dengeden sapmasını temsil eden sarkaç açısı (radyan cinsinden) [32].
Bu örnek için tasarım kriterleri farklıdır. Diğer örneklerde, arabaya uygulanan itici kuvvete
cevaben sarkacı dikey tutmaya çalışıyorduk. Arabanın pozisyonunu kontrol etmeye çalışmadık.
Bu örnekte, sarkaç dikey konumda tutulurken, arabanın konumunu 0,2 metre sağa hareket
ettirmek için kontrol edilir. Durum alanı tasarım yaklaşımı, burada olduğu gibi birden fazla
çıkışın kontrolüne çok uygundur [32].
Bu sorun tam durum geri bildirimi kullanılarak çözülebilir. Şekil 6.9’da tam geri beslemeli
kontrol blok diyagramı verilmiştir. Bu tip kontrol sisteminin şeması aşağıda bir kontrol kazancı
K matrisi olduğu için gösterilmiştir. Burada, sistemin çıktılarını geribildirim için kullanmak
yerine, tüm sistem durumlarını geri bildirdiğimizi unutmayın [32].
Şekil 6.9 Tam Durum Geri Beslemeli Kontrol Şeması
Bu problemde, arabanın pozisyonunun adım komutunu r gösterir. 4 durum, arabanın
pozisyonunu, hızını, sarkacın açısını ve açısal hızını temsil eder. Çıktı y hem arabanın
konumunu hem de sarkacın açısını içerir. Bir denetleyici tasarlamak istiyoruz, böylece sisteme
bir adım referansı verildiğinde, sarkaç yer değiştirmeli, ancak sonunda sıfıra (yani dikey)
dönmeli ve araba yeni komut pozisyonuna geçmelidir [32].
Tam durumlu bir geri besleme denetleyicisi tasarlamanın ilk adımı, sistemin açık döngü
kutuplarını belirlemektir. Bir m-file dosyasına aşağıdaki kod satırlarını girin. MATLAB komut
penceresinde yürütüldükten sonra, çıkış açık döngü kutuplarını (özdeğerlerini) aşağıda
gösterildiği gibi listeleyecektir [32].
22
M
m
b
I
g
l
p
A
=
=
=
=
=
=
=
=
0.5;
0.2;
0.1;
0.006;
9.8;
0.3;
I*(M+m)+M*m*l^2; %denominator for the A and B matrices
[0
1
0
0;
0 -(I+m*l^2)*b/p (m^2*g*l^2)/p
0;
0
0
0
1;
0 -(m*l*b)/p
m*g*l*(M+m)/p 0];
B = [
0;
(I+m*l^2)/p;
0;
m*l/p];
C = [1 0 0 0;
0 0 1 0];
D = [0;
0];
states = {'x' 'x_dot' 'phi' 'phi_dot'};
inputs = {'u'};
outputs = {'x'; 'phi'};
sys_ss =
ss(A,B,C,D,'statename',states,'inputname',inputs,'outputname',
outputs);
poles = eig(A)
poles =
0
-0.1428
-5.6041
5.5651
Tasarım sürecindeki bir sonraki adım, durum değişkenlerinin dördünün hepsinin erişimine
sahip olduğumuzu (yani ölçebiliriz) kabul ederek durum-geri besleme kontrol kazançlarının
vektörünü bulmaktır. Bu, birkaç yolla gerçekleştirilebilir. İstenilen kapalı devre kutup
konumlarını biliyorsanız, MATLAB komutları place ya da acker'ı kullanabilirsiniz. Diğer bir
seçenek de, lineer bir tesis, ikinci dereceden maliyet fonksiyonu ve sıfıra eşit referans
varsayarak en iyi kontrolör kazancını döndüren LQR komutunu kullanmaktır [32].
Kontrolörümüzü tasarlamadan önce, öncelikle sistemin kontrol edilebilir olduğunu
doğrulayacağız. Bu özelliğin memnuniyeti, sistemin durumunu sonlu bir zamanda (sistemin
fiziksel kısıtlamaları altında) istediğimiz her yere götürebileceğimiz anlamına gelir. Sistemin
tamamen kontrol edilebilir olması için, kontrol edilebilirlik matrisinin bir matrisin rankının n
doğrusal olarak bağımsız satırların (veya sütunların) olduğu bir sıralama olması gerekir.
Sistemin kontrol edilebilirlik matrisi, aşağıda gösterilen şekli alır. Sayı, sistemin durum
değişkenlerinin sayısına karşılık gelir. Daha yüksek matris gücüne sahip kontrol edilebilirlik
23
matrisine ilave terimler eklemek, kontrol edilebilirlik matrisinin A sırasını arttırmayacaktır,
çünkü bu ilave terimler daha önceki terimlerin doğrusal kombinasyonları olacaktır [32].
C B
AB
A2 B ... An 1 B
(35)
Kontrol edilebilirlik matrisimiz 4x4 olduğundan, matrisin sırası 4 olmalıdır. Kontrol
edilebilirlik matrisi oluşturmak için MATLAB komutunu ctrb ve matrisin sırasını test etmek
için MATLAB komutunu kullanacağız. Aşağıdaki ek komutları m-file dosyasına eklemek ve
MATLAB komut penceresinde çalıştırmak aşağıdaki çıktıyı verecektir [32].
co = ctrb(sys_ss);
controllability = rank(co)
controllability =
4
Bu nedenle, sistemimizin kontrol edilebilir olduğunu doğruladık ve bu nedenle verilen
gereklilikleri yerine getiren bir kontrolör tasarlayabilmeliyiz. Özellikle, geri besleme kontrolü
kazanç matrisimizi K belirlemek için doğrusal kuadratik düzenleme yöntemini kullanacağız.
MATLAB işlevi LQR, R ve Q iki parametreyi seçmenize izin verir, kontrol çabalarının ( u )
ve hatanın (sırasıyla 0'dan sapma) göreceli önemini, optimize etmeye çalıştığınız maliyet
fonksiyonunda dengeleyecektir. En basit durum R 1 ve Q C ' C varsaymaktır. Buna karşılık
gelen maliyet işlevi, kontrole ve çıkan durum değişkenlerine (sarkaç açısı ve araba pozisyonu)
eşit derecede önem verir. Temel olarak, LQR yöntemi her iki çıkışın kontrolüne izin verir.
Denetleyici, istenen bir yanıtı elde etmek için matristeki sıfır olmayan elemanları değiştirerek
ayarlanabilir. Yapısını gözlemlemek için, aşağıda verilen çıktıyı görmek için MATLAB komut
penceresine aşağıdakini girin [32].
Q = C'*C
Q =
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
24
(1,1) pozisyonundaki eleman, araba pozisyonundaki ağırlığı temsil eder ve (3,3)
pozisyonundaki eleman, sarkaç açısı üzerindeki ağırlığı temsil eder. Girdi ağırlıklandırma R
1'de kalacaktır. Sonunda önemli olan R ve Q , mutlak değerleri değil. Artık Q matrisi nasıl
yorumlayacağımızı biliyoruz, bize 'iyi' bir kontrolör verecek K matrisi bulmak için deneyler
yapabiliriz. Devam edip K matrisi bulacağız ve cevabı tek adımda çizeceğiz, böylece kontrolde
değişiklikler yapılabilir ve yanıtta otomatik olarak görülebilir. Aşağıdaki komutu m-file
dosyanızın sonuna ekleyiniz ve aşağıdaki değeri almak ve aşağıda verilen cevap grafiğini almak
için MATLAB komut penceresinde çalıştırınız [32].
Q = C'*C;
R = 1;
K = lqr(A,B,Q,R)
Ac = [(A-B*K)];
Bc = [B];
Cc = [C];
Dc = [D];
states = {'x' 'x_dot' 'phi' 'phi_dot'};
inputs = {'r'};
outputs = {'x'; 'phi'};
sys_cl =
ss(Ac,Bc,Cc,Dc,'statename',states,'inputname',inputs,'outputname',outputs);
t = 0:0.01:5;
r =0.2*ones(size(t));
[y,t,x]=lsim(sys_cl,r,t);
[AX,H1,H2] = plotyy(t,y(:,1),t,y(:,2),'plot');
set(get(AX(1),'Ylabel'),'String','Araba Konumu (m)')
set(get(AX(2),'Ylabel'),'String','Sarkaç Açısı (rad)')
title('LQR Kontrol')
K =
-1.0000
-1.6567
18.6854
3.4594
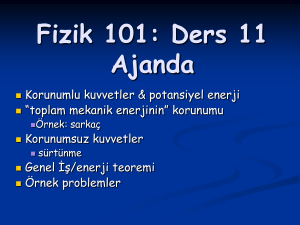
Şekil 6.10 LQR İle Araba Konumu ve Sarkaç açısı
25
Şekil 6.10’da LQR kontrolör kullanarak elde edilen arabanın konumu ve sarkacın açısı
verilmiştir. Kırmızı olan eğri sarkacın radyan cinsinden açısını temsil eder ve mavi olan eğri,
arabanın pozisyonunu metre cinsinden gösterir. Şekil 6.10’dan görüldüğü gibi, bu sonuç tatmin
edici değil. Sarkaç ve araba uyumu iyi görünüyor, ancak oturma sürelerinin düzelmesi ve
arabanın yükselme süresinin azaltılması gerekiyor. Arabanın son konumu da istenen yere yakın
değildir, ancak tam tersi yönde hareket etmiştir. M-file dosyanıza geri dönün ve daha iyi bir
yanıt alıp alamayacağınızı görmek için Q matrisi değiştirin. (1,1) ve (3,3) elementlerini
arttırmanın, çökelme ve yükselme zamanlarını azalttığını ve sarkacın hareket açısını
düşürdüğünü göreceksiniz. Başka bir deyişle, artan kontrol çabası pahasına hatalara daha fazla
ağırlık veriyorsunuz. M-file dosyanızı değiştirerek (1,1) elementi 5000 ve (3,3) elementi 100
olacak şekilde değiştirmek, aşağıdaki değeri ve aşağıda gösterilen adım cevabını üretecektir
[32].
Q = C'*C;
Q(1,1) = 5000;
Q(3,3) = 100
R = 1;
K = lqr(A,B,Q,R)
Ac = [(A-B*K)];
Bc = [B];
Cc = [C];
Dc = [D];
states = {'x' 'x_dot' 'phi' 'phi_dot'};
inputs = {'r'};
outputs = {'x'; 'phi'};
sys_cl =
ss(Ac,Bc,Cc,Dc,'statename',states,'inputname',inputs,'outputname',outputs);
t = 0:0.01:5;
r =0.2*ones(size(t));
[y,t,x]=lsim(sys_cl,r,t);
[AX,H1,H2] = plotyy(t,y(:,1),t,y(:,2),'plot');
set(get(AX(1),'Ylabel'),'String','Araba Konumu (m)')
set(get(AX(2),'Ylabel'),'String','Sarkaç Açısı(rad)')
title('LQR Kontrol')
Q =
5000
0
0
0
0
0
0
0
0
0
100
0
0
0
0
0
K =
-70.7107
-37.8345
105.5298
20.9238
26
Şekil 6.11 LQR ile Arabanın Konumu ve Sarkaç Açısı
Daha yüksek elemanların değerlerini arttırırsanız, Q cevabı daha da artırabileceğinizi
belirtmiş olabilirsiniz. Bu ağırlığın seçilmesinin nedeni, sadece geçici tasarım gereksinimlerini
karşılamasıydı. Daha fazla büyüklüğün arttırılması, izleme hatasını daha küçük yapar, ancak
daha fazla kontrol gücü gerektirir. Daha fazla kontrol çabası genellikle daha yüksek maliyete
(daha fazla enerji, daha büyük aktüatör vb.) karşılık gelir [32].
7.
ARABA TERS SARKAÇ KONTROLÜ TASARIM VE UYGULAMASI
7.1
Mekanik Tasarım
Platform üzerine yerleştirilmiş iki adet mil üzerinde rulman ilişkisi ile hareket edebilen araba
mevcuttur. Motorun kuvvetini, arabaya aktarmak için kayış ve kasnak kullanılmıştır. Araba
üzerinde bulunan enkoderin miline kaplin yardımı ile sarkaç bağlanmıştır. Şekil 7.1’de arabanın
tasarımı gösterilmiştir. Şekil 7.2’de araba ters sarkaç sisteminin genel yapısı gösterilmiştir.
Şekil 7.1 Araba Tasarımı
27
Şekil 7.2 Araba Ters Sarkaç Genel Yapısı
7.2
Elektronik Tasarım
Sarkaçın açı bilgisini okumak için endüstriyel 2 fazlı optik artımsal 400 aralıklı 5-24 V
enkoder tercih edilmiştir. Enkoderden gelen verileri sağlıklı okuyabilmek için işlemci mimarisi
ARM Cortex M4 ve CPU frekansı 184 MHz olan Teensy 3.6 kullanılmıştır. F kuvvetimizi
oluşturan 20 V ve 1390 RPM DC motoru sürebilmek için VNH2SP30 DC motor sürücü
kullanılmıştır. Denetleyicimizi 5 V ile beslemek için LM2596 ayarlanabilir voltaj regülatörü
kullanılmıştır. Aracın hareketini sınırlamak için Mikro Switch kullanılmıştır. Şekil 7.3’te PCB
devresi tasarlanarak baskı devresi oluşturulmuştur. Şekil 7.4 baskı devresi gösterilmektedir.
Şekil 7.3 PCB Devresi
28
Şekil 7.4 Baskı Devresi
7.3
Kontrol Parametrelerinin Belirlenmesi
Aşağıdaki Şekil 7.5’te görüldüğü gibi sistem kontrol şeması ve transfer fonksiyonundan yola
çıkarak kontrol parametrelerini belirlendi.
Şekil 7.5 Sistem Kontrol Seması
Ppend ( s) =
(s)
U (s)
𝑚𝑙
𝑞
=
b(𝐼+𝑚
s
3
+
𝑞
l2)
s
s 2 −(𝑀+𝑚)𝑚𝑔𝑙
s −𝑏𝑚𝑔𝑙
𝑞
𝑞
𝑞 = [(𝑀 + 𝑚) (𝐼 + 𝑚 l 2 ) − ( ml ) 2 ]
29
%Sistem Parametreleri
M=0.5;
m=0.2;
b=0.1;
I=0.006;
g=9.8;
l=0.3;
%Transfer Fonksiyonu
S=tf('s');
q=(M+m)*(I+m*l^2)-(m*l)^2;
P_pend = (((I+m*l^2)/q)*s^2 - (m*g*l/q))/(s^4 + (b*(I +
m*l^2))*s^3/q - ((M + m)*m*g*l)*s^2/q - b*m*g*l*s/q);
%PID Tuner Aracı
pidtool(P_pend);
P_pend
P_pend =
1.045e-05 s
----------------------------------------------------2.3e-06 s^3 + 4.182e-07 s^2 - 7.172e-05 s - 1.025e-05
Şekil 7.6’da gösterildiği gibi Matlab PID Tuner aracını kullanarak kontrol parametrelerini
ve performansını elde edildi. Elde edilen PID parametreleri C değişkeninde atandı.
Şekil 7.6 Matlab PID Tuner Aracı
30
%Kontrol Parametreleri
C
C =
1
Kp + Ki * --- + Kd * s
s
with Kp = 50.1, Ki = 109, Kd = 5.78
Continuous-time PID controller in parallel form.
Continuous-time transfer function.
7.4
Kontrol Algoritması
Şekil 7.7’de sistemin kontrol akış diyagramı gösterilmektedir. Sistem ilk çalıştığı anda sağa
doğru sürekli harekete başlar. Sağ sınır anahtarına temasından sonra orta noktaya gider.
Ardından serbest salınım hareketi yaparak sarkacın belirlenen sapma açısına girmesi sağlanır.
Sarkaç sapma açısına ulaştığı anda PID kontrolör yardımıyla sarkacı dik konumda tutar. Bu
süre içerisinde kesme algoritması ile sürekli enkoderden açı değeri okunmaktadır. Aynı
zamanda kesme algoritması yardımıyla sınır anahtarındaki fiziki değişiklik kontrol edilerek
sistemin hareket kısıtlanması sağlanır. Tüm bu algoritmaya paralel PID kontrol sağlanır.
Şekil 7.7 Kontrol Akış Diyagramı
31
7.5
Uygulama ve Gözlem
Sistemimiz çalıştığı anda serbest salınım hareketini gerçekleştirip daha önce belirlenen
sapma açısına girdiğinde PID kontrolümüz devreye girmekte ve sarkacı dik konumda
tutmaktadır. Sarkaç dik konumda iken dışarıdan bozucu kuvvet uygulandığında set noktasına
geri gelmektedir.
Mekanik tasarımında tercih edilen platformdan kaynaklanan normalden daha fazla titreşim
yapması sistemimize bozucu etken olarak yansımakta ve dik konumda durması güçleşmektedir.
Yazılımda tercih edilen algoritma ve komutların neden olduğu gecikmelerden kaynaklı
olarak sarkacın set noktasında tutulması zorlaşmakta.
32
SONUÇLAR
Bu çalışmada araba-ters sarkaç sisteminin tanımlanması, mekanik ve elektronik tasarımları,
matematiksel modellerin oluşturulması ve kontrol yönteminin belirlenmesi gerçekleştirilmiştir.
Tercih edilen PID kontrol ile sistemi çalıştırarak sarkacı dik komunda tutulması sağlanmıştır.
Sistemimizin eksiklikleri ve kusurları gözlemlenip giderilmeye çalışılmıştır.
33
KAYNAKÇA
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
Mahmood, Z.S., Nicelimli Kontrol Girişi ile Ters Sarkaç Yukarı Kaldırma
Benzetimii,Yüksek Lisans Tezi. 2012.
Antman, S.S., The simple pendulum is not so simple. SIAM review, 1998. 40(4): p. 927930.
Matthews, M.R., C. Gauld, and A. Stinner, The pendulum: Its place in science, culture
and pedagogy, in The Pendulum. 2005, Springer. p. 1-17.
Åström, K.J., J. Aracil, and F. Gordillo. A new family of smooth strategies for swinging
up a pendulum. in Proceedings of the 16th IFAC World Congress. 2005. Elsevier.
Inoue, A., M. Deng, and T. Tanabe. Practical Swing-up Control System Design of Carttype Double Inverted Pendulum. in Control Conference, 2006. CCC 2006. Chinese.
2006. IEEE.
Iwashiro, M., K. Furuta, and K.J. Astrom. Energy based control of pendulum. in Control
Applications, 1996., Proceedings of the 1996, IEEE International Conference on. 1996.
IEEE.
Kizir, S., Z. Bingul, and C. Oysu, Fuzzy control of a real time inverted pendulum system.
Journal of Intelligent and Fuzzy Systems, 2010. 21(1): p. 121-133.
Krishen, J. and V.M. Becerra. Efficient fuzzy control of a rotary inverted pendulum
based on LQR mapping. in Computer Aided Control System Design, 2006 IEEE
International Conference on Control Applications, 2006 IEEE International Symposium
on Intelligent Control, 2006 IEEE. 2006. IEEE.
Muskinja, N. and B. Tovornik, Swinging up and stabilization of a real inverted
pendulum. Industrial Electronics, IEEE Transactions on, 2006. 53(2): p. 631-639.
Zhong, W. and H. Rock. Energy and passivity based control of the double inverted
pendulum on a cart. in Control Applications, 2001.(CCA'01). Proceedings of the 2001
IEEE International Conference on. 2001. IEEE.
Bugeja, M. Non-linear swing-up and stabilizing control of an inverted pendulum system.
in EUROCON 2003. Computer as a Tool. The IEEE Region 8. 2003. IEEE.
Ji, C.W., F. Lei, and L.K. Kin. Fuzzy logic controller for an inverted pendulum s
ystem. in Intelligent Processing Systems, 1997. ICIPS'97. 1997 IEEE International
Conference on. 1997. IEEE.
Kizir, S., Dogrusal Olmayan Ters Sarkaç Sisteminin Tasarımı ve Kontrolü. 2008,
Kocaeli Üniversitesi.
Lozano, R., I. Fantoni, and D.J. Block, Stabilization of the inverted pendulum around
its homoclinic orbit. Systems & control letters, 2000. 40(3): p. 197-204.
Ma, R., et al. dSPACE-based PID controller for a linear motor driven inverted
pendulum. in Mechatronics and Machine Vision in Practice, 2007. M2VIP 2007. 14th
International Conference on. 2007. IEEE.
Magana, M.E. and F. Holzapfel, Fuzzy-logic control of an inverted pendulum with
vision feedback. Education, IEEE Transactions on, 1998. 41(2): p. 165-170.
Nundrakwang, S., et al., Hybrid PD-servo state feedback control algorithm for swing up
inverted pendulum system. ICCAS2005 June, 2005: p. 2-5.
Tang, J. and H. Shoaee, A Comparative Study of Fuzzy Logic and Classical Control
with EPICS [Experimental Physics and Industrial Control System]. 1995, Thomas
Jefferson National Accelerator Facility, Newport News, VA (US).
[14.04.2015]; http://www.emo.org.tr/ekler/69ce79eae467c50_ek.pdf
34
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]
[29]
[30]
[31]
[32]
[33]
[34]
[35]
[36]
[37]
Yamakita, M., K. Nonaka, and K. Furuta. Swing up control of a double pendulum. in
American Control Conference, 1993. 1993. IEEE.
Chen, C.-S. and W.-L. Chen, Robust adaptive sliding-mode control using fuzzy
modeling for an inverted-pendulum system. Industrial Electronics, IEEE Transactions
on, 1998. 45(2): p. 297-306.
S., P. and M. J, Swing up and Stadilization of Reaction Wheel Pendulum. Modelling of
Mechanic System, 2011.
P, K., Inverted Pendulum Control: an Overviev. 2011, Information Technologies and
Control. p. 34-41.
Turnau, A., et al.," The Real-time Network Control of the Inverted Pendulum System
Based on Siemens Hardware." Automatyka/Automatics 17.1 (2013): 83-92.
[20.01.2015];http://www.tasimakaldirmauniteleri.com/
Ogata, K., Modern Control Engineering. Peaeson Education International, ed. Fourth.
2002.
Anonim, http://www.segway.com/segway/specs_iseries.html
Anonim, http://www.akinrobotics.com/
Anonim, http://www.kkk.tsk.tr/
İbrahim
Kaya
ve
Fuat
Peker,
Dicle
University,
July
2017
https://www.researchgate.net/publication/320016485
Anonim, http://www.elektrikde.com/encoder-nedir-kullanim-alanlari/
Anonim,
http://www.ctms.engin.umich.edu/CTMS/index.php?example=Inverted
Pendulum&section=SystemModeling
İshak Erturul, Fen Bilimleri Enstitüsü, Marmara Üniversitesi, Haziran 2015
Radhamohan, S.V., M. Subramaniam, and M. Nigam, Fuzzy swing-up and stabilization
of real inverted pendulum using single rulebase. Journal of Theoretical and Applied
Information Technology, 2010. 14: p. 43-50.
Kizir, S., Z. Bingül, and C. Oysu, Ters Sarkaç Probleminin PID ve Tam Durum GeriBesleme Yöntemleri ile Kontrol,TOK 2007.
ER, F., Control of the Inverted Pendulum: Comparison of Various Strategies for Swing
up and Balancing, in System and Control Engineering. 2002, Bogaziçi Üniversty:
İstanbul.
Mohammadbagheri, A. and M. Yaghoobi. A New Approach to Control a Driven
Pendulum with PID Method. in Computer Modelling and Simulation (UKSim), 2011
UkSim 13th International Conference on. 2011. IEEE.
35