KST Lab. “Manyetik Top Askı Sistemi” Deney Föyü
1. Deney Düzeneği
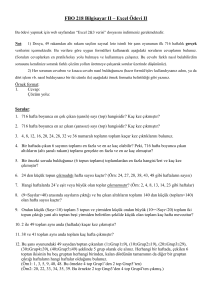
Manyetik Top Askı sistemi kontrol alanındaki popüler uygulamalardan biridir. Buradaki amaç
metal bir kürenin manyetik alan etkisi ile havada sabit tutulmasıdır. Bunun
gerçekleştirilebilmesi için güç kaynağı, elektro mıknatıs oluşturabilmek için sargı, topun
konumunu algılayabilmek için algılayıcı düzeneği ve kontrol ünitesine ihtiyaç vardır.
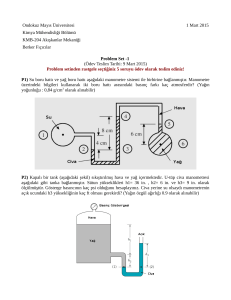
Şekil 1’ de tüm sistemi temsili bir diyagram görülmektedir.
Güç
Kaynağı
Elektro
Mıknatıs
Kontrol
Ünitesi
Fiziksel Sistem
SENSOR
Şekil 1: Temsili Diyagram
2. Fiziksel Sistemin Modellenmesi
Sisteme ait diferansiyel denklem,
m
d 2x
= mg − f ( x, i )
dt 2
(1)
Burada top üzerine etki eden manyetik kuvvetin ( f ), topun ağırlığına eşit olması durumunda
d 2x
) sıfırlanacağı görülmektedir. Fakat topa etki eden kuvvetin topun
dt 2
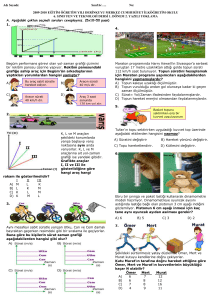
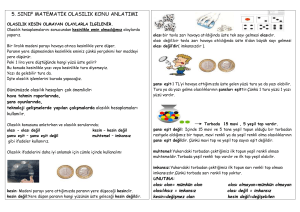
konumuna ve sargıdan geçen akıma bağlı bir fonksiyon olduğu unutulmamalıdır. Sargıya ait
elektriksel yapı Şekil 2’ de mevcuttur.
topun ivmesinin ( m
1
Şekil 2: Sargıya ait elektriksel yapı
Bu yapı 2. dereceden olan fiziksel sistemi 3. dereceden bir sistem haline getireceği için
düzenek içindeki bir yapı ile ihmal edilebilecek hale getirilmiştir. Öyle ki, sargı akımı ile
gerilimi arasında aşağıdaki kabulün yapılması mümkündür.
(2)
i = k1u
Böylece sistem 2. dereceye indirgenmiş olur. Fakat topa etki eden kuvvetin denklemi,
i2
f ( x, i ) = k 2
x
(3)
şeklinde olup, doğrusal bir ifade olmadığı için fiziksel sistem için transfer fonksiyonu
formunda bir ifade elde etmek mümkün olmamaktadır. Burada ki amaç topu dengede tutmak
olduğu için denklemlerin bu denge noktası yakınında doğrusallaştırmak işimizi
kolaylaştıracaktır. Böylece s-domeninde bir ifade elde etmek mümkün olacaktır.
Fiziksel sisteme bağlı sürücü devre giriş noktasındaki gerilim ile topun metrik olarak konumu
arasındaki doğrusallaştırılmış denklem üzerinden elde edilmiş transfer fonksiyonu aşağıdaki
gibidir.
G (s) =
x ( m)
− 25.75
= 2
Vin (V ) s − 2180
(4)
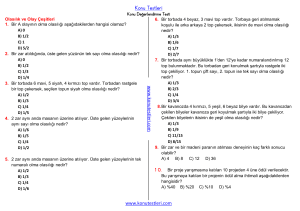
Şekil 3’ te sisteme ait doğrusallaştırılmış blok diyagram gösterilmiştir. (Yukarıda verilen
denklem blok diyagramın en sade şeklidir.)
2
Şekil 3: Doğrusallaştırılmış model
3
1
Voltage signal
Kx1
1.05
Kx
2*0.02*9.81/0.009
Ki
-2*0.02*9.81/0.8
Constant
0.02
Divide
1
s
Integrator2 Integrator1
1
s
voltage
Subsystem2
position
2
Ball position [m]
Ball position [V]
1
Burada dikkat edilmesi gereken nokta, sistemdeki topun konumunu ölçen algılayıcının
konumu gerilim cinsinden ve farklı bir skalada veriyor olmasıdır. “Subsystem2” bloğunun
açık şekli Şekil 4’ te mevcuttur.
1
position
143.48
1
voltage
Gain2
-2.8
Constant1
Şekil 4: Subsystem2
Algılayıcıdan ölçülen değerin topun metrik konumundan farklı değerler vermesi kurulacak
olan kapalı çevrim kontrol sisteminde referans değeri ile çıkış arasında eşleşmezlikler
olmasına sebep olacaktır. Ayrıca daha önce verilen açık çevrim transfer fonksiyonunun
( G ( s ) ) direkt olarak kullanmamız mümkün değildir.
3. Fiziksel Sistemin Denetlenmesi
Sistemin denetlenmesi için PD denetleyici kullanılmış olup, bu OP-AMP lar ile hazırlanmış
bir devre ile gerçeklenmektedir. Şekil 5’te düzeneğin ön paneline ve eş değer devreye ilişkin
yapı görünmektedir.
Şekil 5: PD Denetleyici Yapısı
Burada kullanılan devre yapısı tam PD denetleyici yapısına karşılık gelmemektedir. Bunun
sebebi fazladan eklenmiş olan R2 elemanıdır. Buradaki amaç türev işleminin keskinliğini
azaltmaktır. (Türev + Filtre olarak düşünülebilir)
Devre elemanları RF = R1 = 22kΩ , R2 = 100Ω ve C = 1µF şeklinde seçilirse, denetleyiciye
ait transfer fonksiyonu aşağıdaki gibi olacaktır.
Wd ( s ) =
221s + 10000
s + 10000
(5)
Şekil 6’da sistemin tam blok diyagramı verilmiştir.
4
Şekil 6: Tam blok diyagram
5
Referans
Constant
2
Gain
5
Clock
Transfer Fcn
s+10000
221s+10000
To Workspace2
simout2
Transfer Fcn1
-25.75
2
s +-2180
To Workspace1
simout1
-2.8
Constant1
Scope1
Metre olarak konum
Gain2
143.48
To Workspace
simout
Scope
Algilayici cikisi
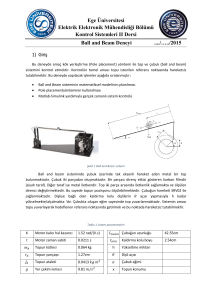
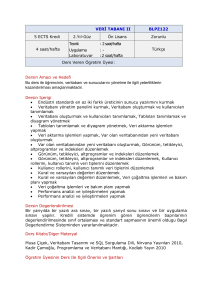
Bu düzeneğe ait grafiksel sonuçlar Şekil 7,8’ de görülmektedir.
Sistemin Cevabi
0.04
0.035
0.025
0.02
0.015
0.01
0.005
0
0
0.02
0.04
0.06
0.08
0.1
0.12
Zaman(sn)
0.14
0.16
0.18
0.2
0.18
0.2
Şekil 7: Metre olarak topun konumu (m)
Sistemin Cevabi
3
2
Algilayici Cikisi (V)
Topun Konumu (m)
0.03
1
0
-1
-2
-3
0
0.02
0.04
0.06
0.08
0.1
0.12
Zaman(sn)
0.14
Şekil 7: Algılayıcı çıkışı (V)
6
0.16
Sonuçlardan görüldüğü gibi kararsız olan manyetik top askı sistemi, kararlı kılınabilmesine
karşın algılayıcının skalası sebebi ile topun istenilen noktaya taşınmasında sorunlar
oluşmasına sebep olmaktadır. Cihaz üzerindeki referans giriş ayarı ile girilen gerilim
değerinin kabaca topun konumunu değiştireceğini söylemek daha doğru olacaktır.
Algılayıcıdan doğan bu eşleşmezlik ile ilgili bir tablo oluşturmak mümkündür.
Mevcut top konumu (cm)
0
1
3
Algılayıcıdan okunan değer (V)
-2.8
-1.37
1.5
Cihazın maksimum akımı sebebi ile topun ulaşabileceği maksimum uzaklığın sınırlı olduğu
da unutulmamalıdır. (Bu düzenek ile 10cm mesafede topun dengede durması mümkün
değildir)
5.Deneyin Yapılışı
İlk aşamada deney seti için gerekli olan pasif eleman eklemeleri yapılır ( R1, 2, F ve C ), bu
elemanların seçimi yapılırken mevcut model kullanılarak, kapalı çevrim sistem köklerinin
hangi noktalara taşınması isteniyor ise eleman değerleri ona göre belirlenmelidir.
Daha sonra sisteme enerji verilir ve top, algılayıcının görebileceği bir konuma el ile
getirilmeye çalışılır, eğer top havada durmuyor ise gerekli ek ayarlamalar (Kazanç ve
Referans değeri) yapılarak tekrar denenir. Top havada durmaya başladıktan sonra ise gene
aynı ayarlar değiştirilerek, bu değişimlerin sistem üzerindeki etkileri hakkında bilgiler elde
edilir.
7