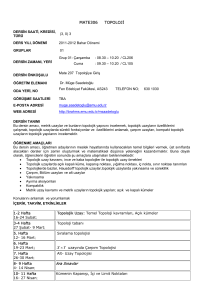
Bir örnek : Sarkaç
x y
y a sin x by
V ( x, y ) a(1 cos x) 0.5 y 2
Gradyen Sistemler
x E (x)
E (x)
dE ( x)
?
dt
E(x)’in zamana göre türevi
çözümler boyunca
dE ( x) E ( x) dx
dt
x
dt
E ( x) T
(E ( x)) E ( x)T E ( x) 0
x
T
Gradyen sistemlere ilişkin özellikler
Teorem 6: (Hirsh-Smale-Devaney, sf. 205)
x E (x)
E(x)’in olağan noktası
E ( xr ) 0, xr R n E ( x) E 1 ( xr )
E ( x* ) 0, x* R n x* dinamik sistemin denge noktaları
E ( x* ) 0, x* R n , x* E ( x) ‘in izole minimumu ise asimptotik kararlı
denge noktasıdır
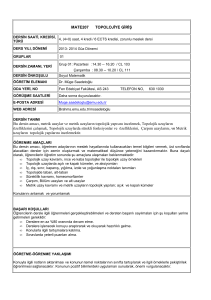
Bir örnek daha
x 2 x( x 1)( 2 x 1)
y 2 y
V ( x, y ) x 2 ( x 1)2 y 2
E(x)’e ilişkin eş
düzey eğrileri Durum portresi
M.W.Hirsh, S. Smale, R.L. Devaney,”Differential Equations, Dynamical Systems and
An Introduction to Chaos”, Elsevier, 2004.
Lineer sistemler için Lyapunov fonksiyonunu
Ne olmalı?
x Ax V ( x) xT Px
V ( x) xT Px x T Px xT PAx xT AT Px
xT ( PA AT P) x
Q
Teorem 7: (Pozitif Reel Lemma- Khalil sf. 240)
G ( s) C ( sI A)1 B D pxp boyutlu transfer fonksiyonu matrisi
( A, B ) yönetilebilir ( A, C ) gözlenebilir
PT P 0 olmak üzere aşağıdaki eşitlikleri sağlayan P,L,W matrisleri
bulunabiliniyorsa G(s) pozitif reeldir.
PA AT P LT L
PB C T LTW
W TW D DT
Tüm bu teoremler, denge noktası veya sabit noktadan
oluşan değişmez kümelerin kararlılığına ilişkin yeter koşulları veriyor.
Limit çevrim, veya daha başka çözümler için ne yapılabilinir?
Teorem 8: (Poincare-Bendixson)
M R 2 kapalı, sınırlı
Değişmez
küme
S M
M 'de ya denge noktası yok ya da 1 , 2 ,..., n eig ( A)
Çevrim
L0 S
i {1,2,..., n}, Re( i ) 0
Liénard’ın denklemi
x
x f ( x) x g ( x) 0
F ( x) ˆ f (t ) dt
0
x1 ˆ x
x2 ˆ
f,g є C1, f,g: R+
R
g tek, f çift fonksiyon
dx
F ( x)
dt
x1 x2 F ( x1 )
x2 g ( x1 )
Ayrıca
g(x)>0, t
x
lim F ( x) ˆ lim
x
x
0
f (t )dt
F ( ) 0, 0, F ( x) 0, 0 x
orijin civarında
kararlı limit çevrim
var
F ( x) 0 ve x da monotonic
özel olarak....
f ( x) ˆ (1 x 2 )
Van der Pol Osilatörü
Dinamik sistemlerin genel, niteliksel özelliklerini belirlemek istiyoruz...
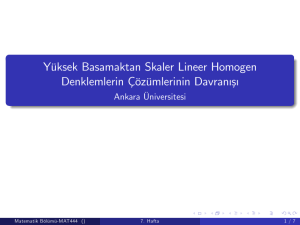
Topolojik Eşdeğerlilik:
D T , R ,
D T , R n , t
n
t
h : Rn Rn h homeomorfizm
Zamanla değişimin yönünü koruyarak
Dve D topolojik eşdeğerdir
Hatırlatma
OrD ( x0 ) h(OrD ( y0 ))
h homeomorfizm h : Rn Rn
h 1-e-1 ve üstüne
h
h sürekli
h -1 sürekli
http://en.wikipedia.org/wiki/Homeomorphism
Sürekli zaman
Ayrık zaman
x f ( x), x R
n
x f ( x), x R n ¤
*
y g ( y ), y R n ¤ ¤
y g ( y ), y R n * *
y h( x), h : R R
n
..., f 1 ( x), x, f ( x), f 2 ( x),... ¤
n
M ( x) ˆ
1
dh( x)
dx
n
..., g 1 ( x), x, g ( x), g 2 ( x),... ¤ ¤
f h 1 ( g (h( x)))
f ( x) M ( x) g (h( x)), x R
(*) sistemi (**)
sistemine
düzgün “eşdeğer”dir .
smoothly equivalent
t
t
h( x) h( x)
f h 1 g h
(¤) sistemi (¤¤) sistemine
“eş”dir
conjugate
x
h
y
f
f (x)
h
g
g ( y)
Topolojik Eşdeğerliliğe ilişkin başka tanımlar da var:
yörüngesel eşdeğerlilik,
Ck eşdeğerlilik
yerel eşdeğerlilik.....
Denge noktası civarında faz portresinin yapısı nasıl incelenebilir?
Sürekli zaman
Ayrık zaman
x f ( x), x R *
n
x* denge noktası olmak üzere
A ˆ f x ( x* )
Özdeğerlerden negatif , sıfır
ve pozitif reel kısımlara sahip
olanların sayısı sırası ile
x f ( x), x R n ¤
x* sabit nokta olmak üzere
A ˆ f x ( x* )
Özdeğerlerden birim daire içinde,
üstünde ve dışında olanların sayısı
sırası ile
n , n0 , n
n , n0 , n
olsun.
olsun.
Hiperbolik denge noktası
Bir denge noktası (sabit nokta)’na ilişkin n0 0 ise o denge noktası
(sabit nokta) hiperbolik denge noktası olarak adlandırılır. nn 0
ise, hiperbolik eyer olarak adlandırılır.
Y.A. Kuznetsov, “Elements of Applied Bifurcation Theory”, Springer, 2004.