JDF 327 Dengeleme Hesabı 1 Ders Notları
Hata Olasılığı Kuramı
Bir ölçü çok sayıda tekrarlandığında ortaya çıkan rastlantısal hatalar incelendiğinde, bunların
belli kurallara uydukları görülür. Bu kurallar:
1) Pozitif değerli hatların sayısı yaklaşık olarak negatif değerli hataların sayısına eşittir.
2) Küçük hata yapma olasılığı büyük hata yapma olasılığından daima daha büyüktür.
3) Hataların sıfır civarında yığılmaları en fazladır.
Bir hatanın a ve b gibi sınır değerler arasında kalma olasılığı
b
P(a b) ( ) d
a
ile tanımlanır. Sınır değerler -<+ şeklinde değiştirildiğinde olasılık mutlak bir hal
alacağından
P( ) ( ) d =1
olur. Gauss tarafından yukarıda geçen olasılık fonksiyonunun
( )
1
mo 2
e
2
2 m02
olduğu gösterilmiştir. Burada mo birim ölçünün karesel ortalama hatasıdır.
En Küçük Kareler Yöntemi İle Dengeleme İlkesi
Dengelem hesabının amacı, fazla ölçülerden yararlanarak bilinmeyenlerin en uygun
değerlerini hesaplamak, ölçüler ve bilinmeyenlerin duyarlık bilgilerini elde etmektir.
Dengeleme hesabı sonucunda ölçüler için elde edilecek düzeltmeler v1, v2,…, vn ile
gösterilirse, bu düzeltmelerin olasılık değerleri hata olasılığı kuramına uygun olarak
P ( v i ) ( vi )
1
mo 2
e
vi2
2 m02
ile tanımlanabilir. Düzeltmelerin tümü için bir olasılık değeri hesaplanmak istendiğinde
yukarıdaki eşitlik
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
vi2
2
1
P ( D) n n / 2 e 2 m0
m0 2
şeklinde düzenlenir. Dengeleme hesabının amacı en olasılıklı değeri elde etmek olduğundan,
yukarıdaki eşitlikte üslü ifadenin minimum olması gerekir. Üslü ifadede mo sabit olduğundan,
minimum olma şartının sağlanabilmesi için
v12 v22 vn2 vv v T v min .
olması yeterlidir. Bu son ifade En Küçük Karaeler Yöntemi’nin temel ilkesini oluşturur.
Duyarlıkları farklı ölçüler söz konusu olduğunda, duyarlığı mi olan bir i ölçüsüne vi
düzeltmesinin getirilme olasılığı
P ( v i ) ( vi )
1
mi 2
e
vi2
2 mi2
ile tanımlıdır. Bu durumda
P( D) P(v1 ) P(v2 ) P(vn )
yazılabilir. Yukarıda verilen P(vi ) değerleri P(D) eşitliğinde yerine yazılır ve
1
Pi
mi2
gösterimi yapılırsa
1
P( D)
e
n/2
(m1 m2 mn )2
Pi vi2
2
yazılabilir. P ( D ) max . olması için
P1v12 P2 v22 Pn vn2 Pvv v T Pv min .
olmalıdır. Bu ilke, duyarlıkları farklı ölçülerin En Küçük Kareler Yöntemi ile dengelemesi
ilkesidir. Eşitlikte geçen Pi değerleri dengelemede, ölçülerin ağırlıkları olarak ifade edilir.
EKKY ile dengeleme hesabının özellikleri şöyle sıralanabilir:
1) Bulunan sonuçlar, en olasılıklı sonuçlardır.
2) Hesaplanan düzeltmeler hata olasılığı kuramına uygundur.
3) Tek anlamlı sonuç elde edilir.
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
Dağılımlar
Dağılım kavramı, rasgele bir örneklemede farklı olayların dağılımını ve olasılığını kapsar.
Dağılımlar rasgele değişkenin özelliğine göre ayrık ya da sürekli olabilirler.
Bir rasgele değişkenin değerleri her zaman gerçel sayılarla gösterilir. Bir kentteki trafik
kazalarının periyodik sayıları, kentte yaşayan insanların boyları, bir kenarın ya da açının ölçü
değeri, hava sıcaklığı gibi değişkenlerin her biri rasgele değişkendir. Bir rasgele değişkenin
belirli bir değeri alma olasılığı “olasılık kuramı” ile açıklanır. Değerleri tamsayılarla
gösterilebilen rasgele değişkenlere ayrık rasgele değişkenler, bunların dağılımına ayrık
dağılımlar adı verilir. Yoldan geçen otomobil sayısı, trafik kazası sayısı gibi olaylar bunlara
örnek olarak verilebilir. Buna karşın kenar ya da açı ölçü değerleri gibi örneklemelerin rasgele
değişkenleri sürekli nitelikli, bunların dağılımları da sürekli dağılımlıdır.
Bir X rasgele değişkeninin bir a değerini alma olasılığı P(X=a) ile gösterilir. Bir a<X<b
aralığında değer alma olasılığı ise P(a<X<b) ile gösterilir; c gibi bir değerden küçük veya ona
eşit olma olasılığı P(Xc) ile c den büyük olma olasılığı ise P(X>c) ile tanımlanır. Bu son iki
olay, uyuşumsuz olaylardır. Ayrıca P(Xc)+ P(X>c)=P(-<X<)=1 olur. Buradan
P(X>c)=1-P(Xc) olduğu söylenebilir.
Olasılık fonksiyonu
X rasgele değişkeninin pozitif olasılıklı değerleri x1, x2 ….., xn ve bunların olasılıkları P1, P2
….., Pn ile gösterilsin. X rasgele değişkeninin x1 değerini alma olasılığı P(X=x1)=P1, x2
değerini alma olasılığı P(X=x2)=P2 dir. Olasılık fonksiyonu f(x) ile gösterilirse, rasgele
değişkenin herhangi bir xi değerini alma olasılığı f(x)=Pi olacaktır. X rasgele değişkeninin
alabileceği tüm değerlerin olasılıkları toplamı 1’dir.
Dağılım fonksiyonu
Bir X rasgele değişkeninin Xa sonsuz aralığında herhangi bir gerçel bir değer alma olasılığı
F(x) ile gösterilirse, bu olasılık x’in bir fonksiyonudur ve dağılım fonksiyonu olarak
adlandırılır (F(x)=P(Xa)).
Ayrık bir X rasgele değişkeninin
F(x)=P(Xa)=f(xi) olacaktır.
xix
aralığında
alacağı
değerlerin
dağılımı
Benzer şekilde, sürekli bir rasgele değişkenin dağılım fonksiyonu integral alınarak
bulunabilir:
a
F ( x)
f ( x)dx
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
Sürekli bir rasgele değişkenin (-<X<+) aralığında bir değer alma olasılığı P(-<X<+)=1
olduğundan P(-<X<+)= F ( x)
f ( x)dx =1
bulunur. X sürekl,i değişkeninin (a<Xb)
b
aralığında değer alma olasılığı P(a<X+)= F (b) F (a ) f ( x) dx olur.
a
Ümit değer
Bir dağılımın ümit değeri ile gösterilir. Ayrık bir dağılımın ümit değeri
xi f ( xi )
i
sürekli bir dağılımın ümit değeri
x f ( x)dx
eşitliğinden hesaplanır.
Ayrık bir rasgele değişkenin alabileceği değerlerin tümü için geçerli bir gerçel fonksiyon olan
g(x)’in ümit değeri
E ( g ( X )) g ( xi ) f ( xi )
i
sürekli bir rasgele değişken için ise
E ( g ( X ))
g(x ) f (x )
i
i
ile tanımlanır. a ve b katsayı olmak üzere X rasgele değişkenin y=a g(X)+b h(x) şeklindeki bir
fonksiyonunun ümit değeri
E ( f ) E (a g ( X ) b h( X )) aE ( g ( X )) b E (h( X ))
olur.
Varyans ve Standart sapma
Ayrık bir dağılımın varyansı
2 ( xi ) 2 f ( xi )
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
ile, sürekli bir dağılımın varyansı ise
2 ( x ) 2 f ( x)dx
ile hesaplanır.
Varyansın karekökü standart sapma adı verilir. Varyans ya da standart sapma, bir rastgele
değişkenin ümit değer etrafındaki yaygınlığının ölçütüdürler. Bir rastgele değişkenin
örnekleme değerleri ümit değer etrafında ne kadar yığılırsa, varyans dolayısıyla standart
sapma o derece küçük olur.
Moment ve merkezi moment
Bir rastgele değişkenin k. Dereceden üssü olan g ( x) x k fonksiyonunun ümit değerine,
değişkenin k. Dereceden momenti denir ve
k E ( x k ) ile gösterilir. Bir rastgele değişkenin ayrık ya da sürekli olmasına göre momenti
k E ( x k ) xik f ( xi ) ya da
k E ( x k ) x k f ( x )dx ile hesaplanır.
Bir rastgele değişkenin g ( x) ( X ) k şeklindeki bir fonksiyonunun ümit değerine, onun k.
dereceden merkezi momenti adı verilir. Ayrık ve sürekli bir rastgele değişkenin merkezi
momenti sırasıyla
E (( x ) k ) ( xik ) k f ( xi ) ve
E (( x ) k ) ( x ) k f ( x)dx
Bağıntılarından hesaplanır.
Bir rastgele değişkenin 1. dereceden merkezi momenti
E ( x ) E ( x) E ( ) 0 olur.
2. dereceden merkezi moment ise
E (( x ) 2 ) E ( xi ) 2 f ( xi ) i2 f ( xi ) 2 olarak bulunur.
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
Normal dağılım
Rastgele hatalar incelendiğinde, bunların hata olasılığı kuramına uydukları ve olasılıklarının
( )
1
mo 2
e
2
2 mo2
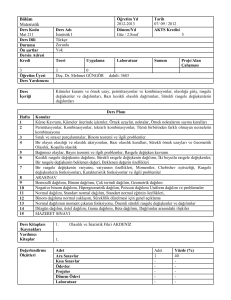
bağıntısı ile tanımlanan normal dağılım olasılık fonksiyonuna uygun
olduğu görülür. Gauss tarafından rastgele ölçü hataların yığılmasını ifade eden bu
fonksiyonun grafik gösterimi bir çana benzediğinden, çan eğrisi olarak adlandırılır. Gauss
dağılımı olarak da adlandırılan normal dağılımın rasgele değişkeni ’nun değeri ile
arasında değişir. Olasılık fonksiyonunun bu aralıklar için integrali alınırsa dağılım fonksiyonu
( )
1
mo 2
2
2 mo2
e
d 1 olur.
Şekil 1. Normal
dağılım olasılık
fonksiyonu
(http://www.efunda.com)
Rastgele değişkenin mo değeri eğrinin dönüm noktalarını verir. Eğrinin mo mo
aralığındaki alanı tüm alanın %68’idir.
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
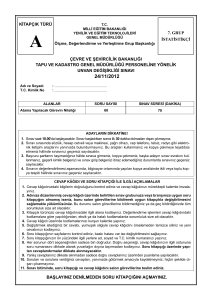
Şekil 2. Normal dağılımın değişik aralıklardaki dağılımı
(http://curvebank.calstatela.edu/gaussdist/gaussdist.htm)
Tablo 1. Sınır değerlere göre normal dağılım
Sınır değer
Sayı
( )
1- ( )
mo mo
%68
%32
1/3
2mo 2mo
%95
%5
1/20
3mo 3mo
%99.7
%0.3
1/400
4mo 4mo
%9999
%0.0001 1/10000
Tablodan rastgele ölçü hatalarının yalnızca 1/400’ünün, başka bir deyişle 1000 hatadan
sadece üçünün ümit değerin 3 katından daha büyük olduğu görülmektedir. Bu nedenle
jeodezik çalışmalarda genellikle karesel ortalamanın 3 katı hata sınırı olarak kabul edilir ve bu
sınır değerden daha büyük hatalar uyuşumsuz ölçü olarak nitelendirilir.
Ümit değeri standart sapması olan normal dağılımlı bir x rastgele değişkeninin herhangi
bir sayısal değeri alma olasılığı
f ( x)
1
F ( x)
1
1 x
2
2
ile hesaplanır. Söz konusu değişkenin a x b aralığında değer
e
2
alma olasılığı ise değişkenin dağılım fonksiyonu
F ( z)
b
2
1
2
b
e
1 x
2
2
dx ile bulunur. Bu eşitlik genelde z
a
e
1
z2
2
x
değişken dönüşümüyle
dz şeklinde standartlaştırılarak kullanılır. Z’nin ümit değeri,
a
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
E( z)
E ( x) E ( )
ve standart sapması
0
2
1
dz dx 1 z 1
1
2
z
olarak bulunur.
Ümit değeri standart sapması olan normal dağılımlı bir x rastgele değişkeni
x N ( , ) şeklinde tanımlanır.
Korelasyon
Bir ölçünün gerçek hatası fiziksel çevre koşullarından kaynaklanan çok sayıda elemanter
hatanın toplamı olarak düşünülür. Gerçek hatayı oluşturan elemanter hatalar çok yavaş
değişirler ve ardı ardına yapılan birçok ölçüde aynı büyüklükte etkili olurlar. Böyle
durumlarda ölçüler birbirlerine bağımlı olurlar. Ölçüler arasındaki bu tür korelasyonlara
“fiziksel korelasyon” adı verilir.
Bazı durumlarda ilk ölçülerin bir fonksiyonu olan x f (l ) ve y g (l ) gibi büyüklüklerin
hesaplanması gerekir. İlk ölçüler bağımsız olsalar bile, bunların fonksiyonları olan x ve y
cebirsel olarak karşılıklı olarak bağımlı olacaktır. Bu tür bir bağımlılığa “cebirsel korelasyon”
adı verilir.
İki ölçü grubu arasındaki korelasyon katsayısı
12
12
ε1T ε 2
1 2
ε1T ε1ε T2 ε 2
12
ε1T ε 2
ile bulunur.
n
ile hesaplanır. Burada 12 kovaryans olarak adlandırılır ve
Korelasyon katsayısı -1 ile +1 arasında değerler alır.
Bir ölçü grubunun kendi arasında hesaplanacak korelasyon katsayısı otokorelasyon olarak
adlandırılır ve
nk
rk
(Y
i 1
i
Yort )(Yi k Yort )
n
(Y
i 1
i
ile hesaplanır. Burada k adım uzunluğu olarak adlandırılır.
Yort )
2
İki veri grubunun birbiriyle bağımlılığını gösteren katsayı ise çapraz korelasyon olarak
adlandırılır ve
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
n
rxy
mxy
mx m y
(X
i 1
n
(X
i 1
i
i
X ort )(Yi Yort )
X ort ) 2
bağıntısıyla hesaplanır.
n
(Y Y
i 1
i
ort
)2
Örnek:
Yanda bir GPS uydusundan 15 saniye epoklarla toplanan
L1 ve L2 faz farkı gözlemleri verilmektedir.
a) L1 faz farkı gözlemlerinin k=1, k=2 ve k=3 adım
değerleri için otokorelasyon değerlerini
hesaplayınız.
b) L1 ve L2 gözlemlerinin çapraz korelasyon
değerlerini hesaplayınız.
ÇÖZÜM:
a)
L1
-0.01519
-40229.89709
-80263.54909
-118645.65009
-156629.33909
-191854.75409
-226260.19009
-260218.60709
-294144.23309
-328394.26309
L2
0.69613
-31347.26103
-62542.29804
-92450.41104
-122048.07804
-149496.43904
-176305.85004
-202766.93704
-229202.47204
-255890.79504
Otokorelasyon bağıntısı:
L1ort= -169664.04980
VL1,i=L1ort-L1i ile elde edilen düzeltmeler vektörü
169664.03461
129434.15271
89400.50071
51018.39971
13034.71071
-22190.70429
-56596.14029
-90554.55729
-124480.18329
-158730.21329
VL1=
Buna göre k=1 için
7.58806E 10
r1
0.697 %69 .7
1.08891E 11
k=2 için
r2
4.44953E 10
0.409 %40 .9
1.08891E 11
k=3 için
r3
1.60373E 10
0.147 %14 .7
1.08891E 11
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
b)
Çapraz korelasyon bağıntısı:
L2ort= -132204.98452
VL2,i=L2ort-L2i ile elde edilen düzeltmeler vektörü
132205.68065
100857.72349
69662.68648
39754.57348
10156.90648
-17291.45452
-44100.86552
-70561.95252
-96997.48752
-123685.81052
VL2=
Buna göre göre L1 ve L2 için çapraz korelasyon
rL1L 2
8.48498E 10
1.00 %100
8.48498E 10
Hata Yayılması
Ölçülen veya ölçülen büyüklüklerden yararlanarak başka büyüklüklerin hesaplanması
mühendislik uygulamalarında sıkça karşılaşılan bir durumdur. Bu gibi durumlarda,
aralarındaki matematiksel ilişkiye bağlı olarak elde mevcut olan büyüklüklerden yeni
hesaplanan büyüklüklere bir hata yayılması söz konusu olacaktır. Mevcut büyüklüklerin
karesel ortalama hataları ve varsa birbirleri arasındaki kovaryansları bilindiği takdirde onların
fonksiyonu olan bir büyüklüğün karesel ortalama hatası “hata yayılma kuralı” uygulanarak
elde edilebilir.
Karesel ortalama hataları m1, m2, ……..,mn ve kovaryansları m12, …., m1n,……, mn-1 n olan l1,
l2, ….., ln ölçülerinin
x f (l1 ,, l n )
(1)
şeklinde tanımlanan bir fonksiyonunu düşünelim. Bu fonksiyonda gerçek düzeltme değerleri
yerine yazılacak olursa
x x f (l1 1 ,, l n n )
(2)
elde edilir. Hata yayılma ilkesinin uygulanabilmesi için bu ifadenin doğrusallaştırılması
gerekir. Gerçek düzeltmeler ölçülere kıyasla çok küçük olduklarından diferansiyel artımlar
olarak da düşünülebilirler. Bu durumda, fonksiyonun birinci dereceden Taylor serisine
açılarak aşağıdaki gibi doğrusallaştırılabilir:
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
x x f (l1 ,, l n )
x
x
1
n
l1
l n
(3)
Eşitlik 1 dikkate alındığında buradan
x
x
x
1
n
l1
l n
(4)
elde edilir. Bu eşitliğin her iki tarafının karesi alındığında
2
x
x
12
l1
l n
2
x
2
2
x x
x x
n 2
1 2 2
l1 l 2
l n 1 l n
n 1 n
(5)
mn 1n
(6)
ve her iki taraf ölçü sayısına bölündüğünde varyans tanımı gereği
2
x
x
m m12
l1
l n
2
x
2
2
x x
mn 2
l1 l 2
x x
m12 2
l n 1 l n
bulunur. Buradan fonksiyonun karesel ortalama hatası, Eşitlik 6’nın karekökünün alınmasıyla
2
x
x
m x m12
l1
l n
2
2
x x
mn 2
l1 l 2
x x
m12 2
l
n
1
l n
mn 11n
(7)
şeklinde elde edilir. Ölçülerin birbirinden bağımsız olduğu durumda kovaryanslı terimler sıfır
olur ve bağıntı
2
x
x
m x m12
l1
l n
2
2
mn
(8)
haline dönüşür.
Bu noktada yukarıda tanımlanan ölçülerin bir başka
y g (l1 ,, l n )
(9)
fonksiyonunu düşünelim. Bu fonksiyonun karesel ortalama hatası da Eşitlik 7’deki gibi
hesaplanacaktır. Her iki fonksiyonun kovaryansına gelince Eşitlik 8’in doğrusal ifadesi
y
y
y
1
n
l1
l n
ile diğer fonksiyonun doğrusal ifadesi Eşitlik 4’ün çarpımından bulunan
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
(10)
x y
x y
x y x y
n2
x y 12
l l l l 1 2
l
l
l
l
1 1
n n
1 2 2 1
x y
l
n
1
l n
x
l n
y
n 11 n
l n 1
(11)
eşitliğinin her iki tarafın ölçü sayısına bölünmesiyle
x
x y
m xy m12
l1 l1
l n
x y
l
n 1 l n
x
l n
y
l n
2 x y x
mn
l l l
1
2
2
y
m12
l1
y
mn 11n
l
n 1
(12)
olarak bulunur.
Dengeleme hesabında Eşitlik 7 ve 12 “genel hata yayılma kuralı” olarak adlandırılır.
Hata yayılma kuralı matris-vektör gösterimi ile ifade edilmek istenirse
l l1 l 2 l n
ölçüler vektörü
x
f
y
ölçü fonksiyonları vektörü
T
x
l
1
A
y
l
1
x
l 2
y
l 2
x
l n
y
l n
fonksiyonlar vektörünün katsayılar matrisi
gösterimleriyle f F(l ) fonksiyonunun diferansiyel ifadesi
df A dl
(13)
ve onun karesinin alınmasıyla varyans-kovaryans matrisi
K f f AK ll A T
olarak elde edilir.
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
(14)
AĞIRLIK VE TERS AĞIRLIK
Ağırlık
Bir büyüklüğe ait l2, ….., ln ölçüleri yapılmış olsun. Ölçüler eşit duyarlıklı ve korelasyonsuz
olduğunda, bu büyüklüğün en uygun değeri
x
l1 l n
n
(15)
olur.
Ancak ölçüler duyarlıkları farklı aletlerle, farklı yöntemlerle, farklı meteorolojik koşullarda
ve/veya yetenekleri farklı ölçmecilerce gerçekleştirildiğinde doğal olarak duyarlıları farklı
olacaktır. Bu durumda ölçülerin kesin değerin hesabına eşit oranda katılması yerine, duyarlık
derecelerini ifade eden ve ağırlık adı verilen bir katsayıyla çarpılarak katılması uygun olur.
Ağırlıkların farklı olması durumunda en uygun değer aşağıdaki gibi hesaplanır:
x
P1l1 Pn l n
P
(16)
Ağırlığın genel bağıntısı
Pi
c
mi2
(17)
genel bağıntısıyla verilir. Bu genel eşitlikten hareketle, ölçülerin ağırlıkları ve duyarlıkları
arasında
P1 m22
ilişkisi yazılabilir.
(18)
P2 m12
Örnek: Bir açı duyarlıkları m1=±8cc ve m2=±20cc olan teodolitler ile birer kez ölçülmüştür.
İkinci teodolit ile yapılan ölçünün ağırlığı p2=1 olarak seçildiğine göre birinci teodolitle
yapılan ölçünün ağırlığını hesaplayınız.
Örnek: Bir açı duyarlıkları farklı 3 teodolitle birer kez ölçülmüştür. Bu teodolitlerle yapılan
gözlemlerin duyarlıklarının m1=±6cc, m2=±15cc ve m3=±10cc oldukları bilindiğine ve ikinci
teodolitle yapılan ölçünün ağırlığı p2=4 seçildiğine göre 1. ve 3. teodolitle yapılan
gözlemlerin ağırlıklarını hesaplayınız.
Ağırlıkları belirlemek için uygun bir ölçünün ağırlığı P=1 alınırsa o ölçünün karesel ortalama
hatası birim ölçünün karesel ortalama hatası m0 olarak saptanmış olur.
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
Bu durumda genel bağıntı mi2
Pi
m02
şeklinden
Pi
m02
şekline gelir.
mi2
Örnek: İki açısı ölçülen bir düzlem üçgende ölçülen açıların ağırlıkları pα=6, pβ=3 olarak
verildiğine göre üçüncü açının hesapla bulunan değerinin ağırlığını hesaplayınız.
Kesin değerin ağırlığına gelince;
Px
m02
m x2
(19)
şeklinde tanımlanır. Ölçülerin eşit duyarlıklı olduğu durum için hata yayılma kuralı
m2
uygulanırsa m x2 0 olarak bulunur.
n
Örnek: Aynı aletle yapılan doğrultu ya da açı ölçümlerinde ölçü sayısı ile ağırlıkları
arasındaki ilişkinin belirlenmesi.
Bu değer yukarıda yerine yazılırsa kesin değerin ağırlığı için
Px
m02
n
m02
n
bulunur.
(20)
Aynı işlem duyarlıkların farklı olduğu duruma uygulandığında m x2
m02
Px 2 P
m0
P
Ağırlıklı Ortalamanın Ağırlığı
elde edilir.
Ağırlıkların 1 ile 10 arasında sayılardan seçilmesi uygun olur.
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
m02
ile
P
(21)
Örnek: Geometrik Nivelman geçkilerinde ağırlıkların belirlenmesi;
B
dh2
dh
dh1
A
d
d
S
Ağırlık yayılma yasası ve ters ağırlık
Ağırlık yayılma yasası, hataların yayılma yasasına dayalı olarak türetilir. Burada basitlik için
korelasyonsuz ölçülerin bir fonksiyonunun hata yayılması için verilen
2
f
f
m m12
l1
l n
2
f
2
2
mn
bağıntısını ele alalım. Bu eşitlikte ağırlık değerleriyle ifade edilecek olursa sırasıyla
2
f
m02 f m02
Pf l1 P1
l n
2
mn2
Pn
(22)
ve
2
f
1 f 1
Pf l1 P1
l n
2
1
Pn
elde edilir. Bu son eşitlik “ağırlık yayılma yasası olarak adlandırılır.
gösterimleriyle ağırlık yayılma yasası
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
(23)
1
1
q ff ve qii
Pf
Pi
2
q ff
f
f
q11
l1
l n
2
q nn
(24)
biçiminde düzenlenebilir. Burada q terimleri ters ağırlıklar veya kofaktörler olarak
adlandırılırlar.
Birim Ölçünün Karesel Ortalama Hatası
Eşit duyarlıklı korelasyonsuz ölçüler söz konusu olduğunda birim ölçünün karesel ortalama
hatası
m0
VV
(25)
n 1
ile tanımlanır. Bu bağıntı P=1 olan ölçünün karesel ortalama hatasını verir. Paydadaki n-1
terimi fazla ölçü sayısıdır. Ölçüler faklı duyarlıkta olduğunda bağıntı
m0
PVV
(26)
n 1
korelasyonlu olduğunda ise
e T Pv
m0
n 1
(27)
olur. Bilinmeyen sayısı u olan bir problemde fazla ölçü sayısı (n-u) olacağından yukarıdaki
eşitliklerde (n-1) yerine (n-u) kullanılır.
İspat 1 (duyarlıkları farklı korelasyonsuz ölçüler):
Duyarlıları farklı korelasyonsuz ölçülerin dengelemesinde en olasılıklı değer:
x
P1l1 Pn l n Pl
P
P1 Pn
ağırlıklı düzeltmeler:
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
ağırlıklı gerçek düzeltmeler:
i x li x ( x vi ) ile
P1 1 P1v1 P1 ( x x)
P2 2 P2 v 2 P2 ( x x)
P1v1 P1 x P1l1
P2 v 2 P2 x P2 l 2
Pn v n Pn x Pn l n
Pv P x Pl
Pn n Pn1v n Pn ( x x)
P Pv P( x x)
Pv P Pl Pl
P
Pv 0
P Px ve
P Px x
(28)
( x x) x ile;
gerçek düzeltmelerin ağırlıklı kareleri toplamı:
P1 1 1 P1v1v1 P1 ( x x) 2 2 P1v1 ( x x)
Pn n n Pn v n v n Pn ( x x) 2 Pn v n ( x x)
2
P Pvv P ( x x) 2 2Pv ( x x)
(29)
P Pvv P ( x x)
2
0
P Px ve ( x x) x
Pvv P Px x2
ile;
Pvv P1 12 Pn n2 Px x2
(30)
Gerçek düzeltmelerin karelerinin en olasılıklı değerleri karesel ortalama hatalar olduğundan
bu ifade aşağıdaki gibi düzenlenebilir:
Pvv P1m12 Pn mn2 Px mx2
(31)
m02
tanımından birim ölçünün karesel ortalama hatası m02 Pi mi2 olarak
mi2
bulunabilir. Bu durumda,
Ağırlığın Pi
Pvv m02 Pn m02 m02 (n 1)m02
m02
Pvv
n 1
m0
Pvv
n 1
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
(31)
(32)
(33)
elde edilir.
İspat 2 (korelasyonsuz ölçüler):
Ağırlıklı düzeltmeler:
Ağırlıklı gerçek düzeltmeler:
ε v e( x x )
v ex l
e T v e T ex e T l
e T ε e T v e T e( x x )
eT l T
e l
e v n
n
T
e v0
e T ε 0 e T e( x x )
T
e T e Px n
ve
(34)
( x x) x ile;
e T ε n x
gerçek düzeltmelerin ağırlıklı kareleri toplamı:
ε T ε v T v e T e( x x) 2 2( x x)e T v
2
eT ε
0
ε ε v v n
n
T
T
12 n2
eT ε 2
T
v v ε ε
ε ε
n
n
T
T
(35)
2
1 2 1 3 n 1 n
n
Ölçüler bağımsız olduğundan eşitlikteki i j terimleri sıfıra gider:
nv T v nε T ε ε T ε (n 1)ε T ε
nv T v
(n 1) T
ε ε
n(n 1) n(n 1)
(36)
vT v εT ε
n 1
n
m02
vT v
n 1
vT v
m0
n 1
(37)
elde edilir.
İspat 3 (korelasyonsuz ölçüler):
x AT A
1
AT l
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
(38)
v T v l T ( I A ( A T A ) 1 A T ) l
E () E (l T (I A ( A T A ) 1 A T )l )
E () İz ((I A ( A T A ) 1 A T )K ll ) E (l T )(I A ( A T A ) 1 A T ) E (l )
E () İz ((I A ( A T A ) 1 A T ) 2 I ) x T A T (I A ( A T A ) 1 A T ) Ax
İz (I A ( A T A ) 1 A T ) İz (I ) İz ( A ( A T A ) 1 A T ) n u
x T A T (I A ( A T A ) 1 A T ) Ax 0
E ( ) 2 ( n u )
m02
(n u )
m0
vT v
(n u )
(39)
K.O.H.’ların Ölçü Çiftlerinden Hesaplanması
Nivelman, kenar ölçmesi gibi gidiş-dönüş olarak yapılan ölçmelerde veya doğrultuların iki
durumda ölçülmesi gibi durumlarda k.o.h.’lar ölçü çiftlerinden hesaplanabilir.
Eşit duyarlıklı bağımsız ölçmelerde birim ölçünün k.o.h.’sı
m0
dd
(40)
2n
ölçü çiftlerinden hesaplanan ortalama değerin k.o.h’sı
ml
m0
2
1
2
dd
n
ile hesaplanır.
İspat:
l1 ,, l n büyüklükleri çift ölçülerin ortalama değerleri olsun ve
1. grup ölçüler l11 ,, l1n
2. grup ölçüler l 21 ,, l 2 n
şeklinde gösterilsin. Buna göre her bir ölçme ile, onun gerçek değeri arasında;
xi l1i l l 2i l
1i
2i
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
(41)
ilişkisi yazılabilir. Bu eşitlikten
d i l1i l 2i l2 i l1i
şeklinde düzenlenir ve bunun karesi alınırsa
d i2 l22 i l21i 2 l1i l2 i
elde edilir. Eşitlik i2 mi2 ve ij mij değişikliğiyle
d i2 ml22 i ml21i 2ml1i l2 i
şeklinde düzenlenebilir. Ölçmeler eşit duyarlıklı olduklarından ml22 i ml21i m02 ve bağımsız
olduklarından ml1i l2 i 0 olacaktır. Bu durumda
d i2 2m02
olur. Bu bağıntı her bir ölçü çifti için yazılır ve taraf tarafa toplanırsa
d12 2m02
d 22 2m02
d 2m02
dd 2nm02
2
n
m02
dd
2n
dd
m0
2n
bulunur.
Duyarlıklı farklı korelasyonsuz ölçüler söz konusu olduğunda birim ağırlıklı ölçünün k.o.h.’sı
m0
Pdd
(40)
2n
birim ağırlıklı ölçü çiftlerinden hesaplanan ortalama değerin k.o.h’sı
ml
m0
2
1
2
Pdd
n
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
(41)
ağırlığı Pi olan bir tek ölçünün k.o.h.’sı
mi
m0
mli
ml
Pi
ve ağırlığı Pi olan ölçü çiftlerinden hesaplanan ortalama değerin k.o.h.’sı
Pi
ile hesaplanır.
İspat:
Yukarıda çıkarılan
d i2 ml22 i ml21i 2ml1i l2 i
ifadesi ölçü ağırlığıyla çarpıldığında
Pi d i2 Pi ml22 i Pi ml21i 2 Pi ml1i l2 i
elde edilir. Pi ml22 i Pi ml21i m02 ve ölçüler bağımsız olduğundan
Pi d i2 2m02
olur. Bu bağıntı her bir ölçü çifti için yazılır ve taraf tarafa toplanırsa
P1 d 12 2m02
P2 d 22 2m02
Pn d 2m02
Pdd 2nm02
2
n
m02
Pdd
2n
Pdd
m0
2n
bulunur.
Prof. Dr. Şenol Hakan KUTOĞLU
Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ