DÜŞÜK KARMAŞIKLIKLI ÖZNİTELİKLER
KULLANILARAK SOLUNUM SESİ İÇERİSİNDEKİ
KALP SESLERİNİN YERLERİNİN OLASILIKSAL
MODELLEME İLE KESTİRİMİ
Hamed SHAMSI
Doktora Tezi
Elektrik ve Elektronik Mühendisliği Anabilim Dalı
Haberleşme Bilim Dalı
Yrd. Doç. Dr. İ. Yücel ÖZBEK
2015
Her hakkı saklıdır
ATATÜRK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
DOKTORA TEZİ
DÜŞÜK KARMAŞIKLIKLI ÖZNİTELİKLER KULLANILARAK
SOLUNUM SESİ İÇERİSİNDEKİ KALP SESLERİNİN
YERLERİNİN OLASILIKSAL MODELLEME İLE KESTİRİMİ
Hamed SHAMSI
ELEKTRİK ve ELEKTRONİK MÜHENDİSLİĞİ ANABİLİM DALI
Haberleşme Bilim Dalı
ERZURUM
2015
Her hakkı saklıdır
T.C.
ATATÜRK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
TEZ ONAY FORMU
DÜŞÜK KARMAŞIKLIKLI ÖZNİTELİKLER KULLANILARAK SOLUNUM
SESİ İÇERİSİNDEKİ KALP SESLERİNİN YERLERİNİN OLASILIKSAL
MODELLEME İLE KESTİRİMİ
Yrd. Doç. Dr. İ. Yücel ÖZBEK danışmanlığında, Hamed SHAMSI tarafından
hazırlanan bu çalışma 08/01/2015 tarihinde aşağıdaki jüri tarafından Elektrik ve
Elektronik Mühendisliği Anabilim Dalı - Haberleşme Bilim Dalı’nda Doktora tezi
olarak oybirliği ile kabul edilmiştir.
Başkan : Doç. Dr. Uğur Cem HASAR
İmza
:
Üye
:Yrd. Doç Dr. İ. Yücel ÖZBEK
İmza
:
Üye
: Yrd. Doç Dr. Emin Argun ORAL
İmza
:
Üye
: Yrd. Doç Dr. Tolga AYDIN
İmza
:
Üye
: Yrd. Doç Dr. Bülent ÇAVUŞOĞLU
İmza
:
Yukarıdaki sonuç;
Enstitü Yönetim Kurulu ........./......../…….. tarih ve . . . . . ./ . . . . . . . . . . . . . . nolu
kararı ile onaylanmıştır.
Prof. Dr. İhsan EFEOĞLU
Enstitü Müdürü
Not: Bu tezde kullanılan özgün ve başka kaynaklardan yapılan bildirişlerin, çizelge, şekil ve fotoğrafların kaynak
olarak kullanımı, 5846 sayılı Fikir ve Sanat Eserleri Kanunundaki hükümlere tabidir.
ÖZET
Doktora Tezi
DÜŞÜK KARMAŞIKLIKLI ÖZNİTELİKLER KULLANILARAK SOLUNUM
SESİ İÇERİSİNDEKİ KALP SESLERİNİN YERLERİNİN OLASILIKSAL
MODELLEME İLE KESTİRİMİ
Hamed SHASMI
Atatürk Üniversitesi
Fen Bilimleri Enstitüsü
Elektrik-Elektronik Mühendisliği Anabilim Dalı
Haberleşme Bilim Dalı
Danışman: Yrd. Doç. Dr. İ. Yücel ÖZBEK
Bilgisayar yardımı ile kalp seslerinin yerlerinin ortam gürültüsü veya akciğer sesleri
içerisinde tespit edilmesi kalp ve akciğer sesi sinyallerinin işlenmesi uygulamalarında
en temel adımlardan biridir. Bu tezin temel amacı solunum sesi içerisindeki kalp
seslerinin yerlerini bulmaktadır. Bu amaç doğrultusunda tez üç bölümden oluşmaktadır.
Tezin ilk bölümünde kalp seslerinin yerlerini bulmak için entropi sınırına dayalı yeni bir
öznitelik önerilmektedir. Önerilen özniteliğin kalp seslerinin yerlerini bulmada oldukça
başarılı olduğu ve işlem yükü açısından oldukça düşük işlem yüküne sahip olduğu
gösterilmiştir. Bu tezin ikinci bölümünde kalp seslerinin sınırlarını bulmak için öğrenme
kabiliyeti olan ve bulanık c-ortalama (FCM) algoritmasına dayalı yeni bir algoritma
önerilmektedir. Bu algoritma zamansal bulanık c-ortalama (TFCM) olarak
adlandırılmaktadır. TFCM algoritması herhangi bir çerçevenin sınıfı hakkında karar
verirken yalnızca o çerçeveye değil, o çerçevenin etrafındaki çerçevelere de bakarak
karar verme işlemini gerçekleştirmektedir. Bu tezin üçüncü bölümünde kalp seslerinin
yerlerini bulma işleminin etiketlendirilmiş eğitim verisi kullanılarak nasıl daha
iyileştirilebileceği anlatılmaktadır. Bu bölümde önerilen yöntem olabilirlik oranı testi
(LRT) ve etkili bir uyarlama işlemine dayanmaktadır. Önerilen yöntemde LRT iki
hipotez kullanmaktadır. Bu hipotezlerden ilki analiz edilen çerçevenin kalp sesi diğeri
ise kalp sesi olmadığını savunmaktadır ve bu iki hipotez Gauss karışım modeli (GKM)
ile modellenmektedir. Her bir modelin parametre kümesi elde bulunun etiketlendirilmiş
eğitim verisi kullanılarak kestirilmektedir.
2015, 80 sayfa
Anahtar Kelimeler: Soluk sesi, kalp sesi, entropi özniteliği, logaritmik enerji
özniteliği, entropi sınırı, bulanık c-ortalamalar, olabilirlik oranı testi.
i
ABSTRACT
Ph. D. Thesis
ESTIMATION OF HEART SOUND LOCATIONS IN RESPIRATORY SOUND
BASED ON PROBABILISTIC MODELING WITH LOW- COMPLEXITY
FEATURES
Hamed SHAMSI
Atatürk University
Faculty of Engineering
Department of Electrical and Electronic Engineering
Department of Telecommunication
Supervisor: Assist. Prof. Dr. İ. Yücel ÖZBEK
Heart sound detection and segmentation in ambient noise or respiratory sound is a basic
step for various heart and lung sound signal processing applications. The goal of this
thesis is detecting of the heart sound (HS) with lung sound and the lung sound only
(non-HS) segments in a respiratory signal. For this purpose, the thesis consists of three
parts. In the first part of the thesis, the location of the heart sounds is find using a new
feature. The proposed feature in heart sound detection task have a good performance in
heart sound boundary detection and its computational cost is much lower. In the second
part of this thesis we proposed a new method which it have an efficient learning
mechanism. This method is named as temporal fuzzy c-means. The TFCM algorithm
uses the temporal information from both the current and the neighboring frames in
decision making. In the third part of this thesis, we describe how classification results
are improved by using training labeled data. The proposed method is based on
likelihood ratio test combined with an efficient adaptation procedure. The proposed
method uses two hypotheses. The first hypothesis, is contains only the lung sound and
the alternative hypothesis is contains the heart sound with the lung sound and these
hypothesis are modelled by Gaussian mixture models. The model parameters are
estimated using the set of labelled training data.
2015, 80 pages
Keywords: Respiratory sound, heart sound, entropy feature, logarithm energy feature,
entropy bound, fuzzy c-means, likelihood ratio test.
ii
TEŞEKKÜR
Doktora tez çalışmamın yürütülmesinde tecrübelerini ve bilgilerini esirgemeyen çok
değerli hocam Sayın Yrd. Doç. Dr. İ. Yücel ÖZBEK’e çok teşekkür ederim. Ayrıca tez
çalışması süresince bana vermiş oldukları her türlü destek den dolayı, Sayın Yrd. Doç.
Dr. Bülent ÇAVUŞOĞLU’a ve Sayın Yrd. Doç. Dr. Emin Argun ORAL’a çok teşekkür
ederim. Tez süresince ve özellikle tezin Türkçe olarak yazılmasında yardımcı olan Fatih
ÇAĞLAR, Sema COŞĞUN ve M. Alptekin ENGİN’a çok teşekkür ediyorum.
Hayatim boyunca yardımları, sabırları ve iyilikleri için babama, anneme ve değerli
kardeşlerime teşekkür ederim.
Bu tezi sevgili eşim Samane ve biricik oğlum Emir Hesam’a armağan ediyorum.
Hamed SHAMSI
Ocak, 2015
iii
İÇİNDEKİLER
ÖZET.................................................................................................................................. i
ABSTRACT ...................................................................................................................... ii
TEŞEKKÜR .....................................................................................................................iii
SİMGELER ve KISALTMALAR DİZİNİ ...................................................................... vi
ŞEKİLLER DİZİNİ......................................................................................................... vii
ÇİZELGELER DİZİNİ .................................................................................................... ix
1. GİRİŞ ....................................................................................................................... 1
2. KURAMSAL TEMELLER ................................................................................... 3
3. MATERYAL ve YÖNTEM ................................................................................... 8
3.1. Solunum sesi içerisindeki kalp seslerinin entropi sınırı ile tespiti ........................ 8
3.1.1. Problem tanımı ve önceki çalışmalar ................................................................. 8
3.1.2. Olasılık Yoğunluk Fonksiyonunun Kestirimi .................................................... 9
3.1.3. Entropi kestirimi ............................................................................................... 10
3.1.4. Önerilen yöntem ............................................................................................... 12
3.1.4.a. Üst sınır elde edilmesi ................................................................................... 12
3.1.4.b. Önerilen karar mekanizması .......................................................................... 14
3.1.5. KDE ve GE sonuçlarının hesaplama karmaşıklığının analitik hesaplanması .. 15
3.1.6. Hesaplama karmaşıklığı ................................................................................... 16
3.2. Zamansal Bulanık C-Ortalamalar Dayalı Kalp Sesi Lokalizasyonu ................... 18
3.2.1. Giriş ve önceki çalışmalar ................................................................................ 19
3.2.2. Özellik çıkarma ve düzgünleştirme .................................................................. 20
3.2.2.a. Logaritmik enerji özelliği .............................................................................. 20
3.2.2.b. Entropi özniteliği ........................................................................................... 20
3.2.2.c. Öznitelik değerlerinin düzgünleştirilme işlemi ............................................. 21
3.2.3. FCM lokalizasyon metodu ............................................................................... 21
3.2.4. TFCM lokalizasyon metodu ............................................................................. 22
3.2.5. Önerilen yöntemin ilklendirilmesi ve sonuç kararları ...................................... 23
3.3. Olabilirlik Oranı Testi (LRT) ile Birlikte Maksimum a Posterior Adaptasyon
Esas Alan Yöntem .............................................................................................. 25
3.3.1. Öznitelik çıkarma ............................................................................................. 26
3.3.2. Olasılık modellerin tanımlanması .................................................................... 28
iv
3.3.3. Başlangıç model parametrelerinin belirlenmesi ............................................... 30
3.3.4. LRT ile kalp sesine ait kısımları tespit etme .................................................... 30
3.3.5. EM-MAP’e dayalı başlangıç parametrelerinin çevrimiçi adaptasyonu ........... 32
4. ARAŞTIRMA BULGULARI .............................................................................. 38
4.1. Veri tabanı ........................................................................................................... 38
4.2. Veri tabanının etiketlenmesi ................................................................................ 38
4.3. Performans değerlendirmeleri ölçütleri ............................................................... 39
4.3.1. Ortalama hata ölçütleri ..................................................................................... 39
4.3.2. Hata algılama denge grafiği (DET) .................................................................. 40
4.3.3. Geçen süre ........................................................................................................ 41
4.3.4. Önemlilik testi .................................................................................................. 41
4.4. Entropi Sınırına Dayalı Yöntemin Deneysel Sonuçları ve Tartışması ................ 42
4.4.1.
,
ve
arasındaki ilişki .................................................... 42
4.4.1.a.
ve
arasındaki ilişki ............................................................... 42
4.4.1.b.
ve
enropilerin korelasyon ve varyans analizi ...................... 46
4.4.2. Önerilen yöntem ve diğer yöntemlerin karşılaştırılması .................................. 48
4.5. Zamansal Bulanık C-Ortalamalar Yönteminin Deneysel Sonuçları ve
Tartışması............................................................................................................ 52
4.5.1. Özellik karşılaştırması sonuçları ...................................................................... 52
4.5.2. Yöntem karşılaştırması sonuçları ..................................................................... 56
4.6. Olabilirlik Oranı Testi (LRT) ile Birlikte Maksimum a Posterior Adaptasyon
Yöntemi ile Elde Edilen Deneysel Sonuçlar ve Tartışma................................... 61
4.6.1. Öznitelik boyutunun belirlenmesi ile ilgili deneysel sonuçlar ......................... 61
4.6.2. GKM parametrelerinin adaptasyonu ile elde edilen deneysel sonuçlar ........... 63
4.6.3. Önerilen yöntemin literatürdeki yöntemler ile karşılaştırılması....................... 69
5. SONUÇ .................................................................................................................. 73
KAYNAKLAR ............................................................................................................... 75
EKLER ............................................................................................................................ 78
EK 1. ........................................................................................................................... 78
EK 2. ........................................................................................................................... 79
EK 3. ........................................................................................................................... 80
ÖZGEÇMİŞ .................................................................................................................... 81
v
SİMGELER ve KISALTMALAR DİZİNİ
KS
Kalp sesi
S1
Birinci kalp sesi
S2
İkinci kalp sesi
pdf
Olasılık yoğunluk fonksiyonunun
CWT
Sürekli dalgacık dönüşümü
SSA
Singular spektrum analizi
FNR
Yanlış negatif oranı
FPR
yanlış pozitif oranı
FN
Yanlış negatif
FP
Yanlış pozitif
TN
Doğru negatif
TP
Doğru pozitif
FCM
Bulanık c-ortalamalar
TFCM
Zamansal bulanık c-ortalamalar
QPM
Yarı periyodik modelleme
DET
Hata algılama denge grafiği (Detection Error Tradeoff Graph)
NAUC
Eğri altında kalan normalize alan
EM
Beklenti maksimizasyonu
GKM
Gauss karışım model
SD
Kişiye bağımlı
SI
Kişiden bağımsız
SD-GKM Kişi bağımlı - Gauss karışım model
SI-GKM
Kişiden bağımsız - Gauss karışım model
ML
Maksimum olabilirlik
MAP
Maksimum a posteriori
LRT
Olabilirlik oranı testi
ALRT
Adapte edilmiş LRT
ASI
Adapte edilmiş SI
vi
ŞEKİLLER DİZİNİ
Şekil 3.1. Önerilen ve KDE yöntemlerinin kalp ses algılama adımlar ve ilgili
hesaplamalı karmaşıklıkları ............................................................................ 16
Şekil 3.2. Önerilen yöntemin ana blok diyagramı .......................................................... 27
Şekil 3.3. Orta akış hızındaki solunum ses parçası ve uygun logaritmik enerjiye
(düzgünleştirilmiş versiyonu ile birlikte) ....................................................... 28
Şekil 3.4. KS ve non-KS çerçevelerin histogramları ve tahmin edilmiş GKM pdf’leri . 29
Şekil 4.1. (a) Solunum sesinin küçük bir kısmı (b) ve (c) ECG ve spektrum dalga
formu .............................................................................................................. 39
Şekil 4.2. Hata algılama denge grafiği ............................................................................ 41
Şekil 4.3. (a) Solunum sesi düşük akış hızında (b) ilgili tahmini entropiler
(
,
) ............................................................................................ 43
Şekil 4.4. (a) Tahmini entropilerin 615 ve 650 çerçeveler arasındaki aralığın yakın
çekim (b) ve (c) sırasıyla çekirdek ve Gauss tabanlı dağılımların pdf
tahminleri 635 ve 631th çerçeveler için. ........................................................ 44
Şekil 4.5.
,
entropilerin arasındaki ilişki (a) düşük nefes seviyesi
için (b) orta nefes seviyesi için ....................................................................... 45
Şekil 4.6.
,
entropilerin arasındaki ilişki (a) düşük nefes seviyesi
için (b) orta nefes seviyesi için ....................................................................... 47
Şekil 4.7.
,
entropilerin histogramları (a) düşük nefes seviyesi
için (b) orta nefes seviyesi için. ...................................................................... 49
Şekil 4.8. Önerilen ve diğer yöntemlerin FNR, FPR ve geçen süresi açısından
karşılaştırılması............................................................................................... 52
Şekil 4.9. TFCM tabanlı özellik karşılaştırması sonuçları .............................................. 54
Şekil 4.10. (a) Solunum sesinin bir parçası düşük nefes sevisinde (b) ilgili parçanın
logaritmik enerji özeliği (c) logaritmik enerji özeliğine dayalı KS
lokalizasyon sonuçları (d) düzetilmiş logaritmik enerji özeliğine dayalı
KS lokalizasyon sonuçları ............................................................................ 55
vii
Şekil 4.11. TFCM, QPM, FCM ve SSA yöntemlerin sonuçları (a) düşük (b) orta
nefes seviyelerinde ....................................................................................... 57
Şekil 4.12. (a) Solunum ses sinyalinin bir bölümü ve (b)-(e) sırasıyla, TFCM,
QPM ve SSA yöntemleri sonuçları gerçek KS sınırları ile birlikte. ............ 60
Şekil 4.13. LRT yönteminin farklı m değerleri için DET sonuçları (a) düşük (b) orta
nefes seviyelerinde ....................................................................................... 62
Şekil 4.14. GKM adaptasyon sonuçları çeşitli süre uyarlama verileri için (a) düşük
(b) orta nefes seviyelerinde .......................................................................... 64
Şekil 4.15. ALRT ve LRT yöntemlerin DET sonuçları (a) düşük (b) orta nefes
seviyelerinde................................................................................................. 65
Şekil 4.16. Karışım bileşenlerinin çeşitli sayıda NAUC değerleri düşük ve orta
nefes seviyelerinde ....................................................................................... 67
Şekil 4.17. ALRT yöntemine göre iterasyon sonuçları .................................................. 67
Şekil 4.18. LRT ve ALRT yöntemlerin NAUC sonuçları tüm veri tabanı için .............. 68
Şekil 4.19. ALRT, QPM, ve SSA yöntemlerin DET sonuçları (a) düşük (b) orta
nefes seviyelerinde ....................................................................................... 70
Şekil 4.20. Bütün yöntemlerin NAUC sonuçları tüm veri tabanı için ............................ 71
viii
ÇİZELGELER DİZİNİ
Çizelge 3.1. Önerilen TFCM algoritmasına dayalı kalp sesi lokalizasyonu ................... 24
Çizelge 3.2. Önerilen algoritmaların ilklendirilmesi ...................................................... 25
Çizelge 3.3. Önerilen algoritmaların adımları ................................................................ 36
Çizelge 4.1.
ve
arasındaki doğrusal ilişki ............................................... 46
Çizelge 4.2. Tüm veriler için istatistiksel analiz sonuçları ............................................. 48
Çizelge 4.3. Önerilen metottun ve diğer metotların ortalama ve standarda sapması
düşük ve orta nefes sevilerinde .................................................................. 50
Çizelge 4.4. Önerilen metodun ve diğer metotların geçen süre ve normalize geçen
süre sonuçları ............................................................................................. 51
Çizelge 4.5. Tüm özeliklerin NAUC değerleri TFCM algoritması için ......................... 56
Çizelge 4.6. Tüm yöntemlerin NAUC değerleri düşük ve orta nefes seviyelerinde....... 58
Çizelge 4.7. Önerilen metottun ve diğer metotların ortalama ve standarda sapması
düşük ve orta nefes sevilerinde .................................................................. 59
Çizelge 4.8. Önerilen metottun ve diğer metotların ortalama ve standarda sapması
düşük ve orta nefes sevilerinde .................................................................. 59
Çizelge 4.9. Önerilen metottun ve diğer metotların geçen sure ve normaliz gecen
süre sonuçları ............................................................................................. 60
Çizelge 4.10. Tüm M değerleri için NAUC değerleri düşük ve orta nefes
seviyelerinde. ............................................................................................. 62
Çizelge 4.11. LRT ve ALRT için NAUC ve önemlilik test değerleri düşük ve orta
nefes seviyelerinde ..................................................................................... 66
Çizelge 4.12. SSA, QPM ve ALRT için düşük ve orta nefes seviyelerinde NAUC
ve önemlilik test değerleri.......................................................................... 69
Çizelge 4.13. Önerilen metottun ve diğer metotların ortalama ve standarda sapması
düşük ve orta nefes sevilerinde .................................................................. 71
ix
1
1. GİRİŞ
Teknolojinin çok hızlı bir şekilde geliştiği günümüzde tıptan askeri uygulamalara kadar
birçok alanda karar verme mekanizmalarında makine öğrenme yöntemlerinin aktif
kullanılması gün geçtikçe artmaktadır. Hastanelerde hekimleri kullandıkları birçok
cihaz sadece test sonuçlarını göstermekle kalmayıp bu sonuçlar hakkında yorum
yaparak hastalıkların teşhislerde önemli rol oynamaktadır. Örneğin önceleri sadece kalp
seslerini mekanik olarak yükseltip doktorların duymasına yardımcı olan stetoskoplar,
şimdilerde elektronik olarak kalp sesleri yükseltip, filtreler yardımıyla ortam
gürültülerini bastırıp hekimlere ulaştırırken bilgisayar yardımıyla sesleri işleyerek
hastalıklı kalpteki üfürüm yerlerini bularak üfürümün çeşidi hakkında fikir
verebilmektedirler. Bu gelişmelere paralel olarak bu tez kapsamında kalp seslerinin ve
akciğer seslerinin bilgisayar yardımıyla işlenerek istenilen niteliklere hazır hale
getirilmesinin temel adımı olan kalp seslerinin yerlerinin doğru ve düşük işlem yükü ile
kestirilmesi için yeni öznitelikler ve sınıflandırma yöntemleri önerilmektedir. Kalp
seslerinin sınırlarının normal ortam şartlarında veya akciğer sesi içerisinde bulma işlemi
iki aşamadan oluşmaktadır. Bunlardan ilki eldeki sinyalin belirli uzunluktaki
çerçevelere bölünmesi ve her bir çerçeve için uygun özniteliklerin çıkarılması. İkincisi
ise her bir çerçevenin hangi sınıfa (kalp sesi veya kalp olamayan) ait olduğunu bulmaya
yarayan sınıflandırma işlemidir. Bu işlemeler sırasıyla gerçekleştirilirken işlem yükünün
hafif ve sınıflandırma doğruluk başarısının yüksek olması istenen önemli iki özelliktir.
Bu tez çalışması kapsamında öncelikle kalp seslerinin sınırlarının bulunmasında
literatürde sıkça kullanılan entropi özniteliğinin üst sınırı kullanarak yeni bir öznitelik
önerildi. Bu özniteliğin işlem yükü hafif ve sınıflandırma başarısı işlem yükü fazla olan
özniteliklere eş olduğu gösterildi. Bu tez kapsamında bu yeni özniteliğe ek olarak,
literatürde bulunan ve kalp seslerinin sınırlarını bulma işleminde kullanılan
sınıflandırma algoritmalarından daha yüksek performansa sahip iki yeni sınıflandırma
algoritması önerilmiştir. Bu algoritmalardan ilki zamansal bulanık c-ortalama (TFCM)
algoritmasıdır. Bu algoritma bulanık c-ortalama (FCM) algoritması uyarlanarak elde
edilmiştir. TFCM yöntemi özyineli (iterative) öğrenme kabiliyetine sahip bir
algoritmadır ve herhangi bir çerçevenin sınıfını belirlerken sadece ilgili çerçeveye değil
2
o çerçevenin çevresindeki çerçeveleri de dikkate alır. Bu şekilde karar mekanizmasında
zamansal değişim bilgilerini de kullanarak literatürde var olan diğer sınıflandırma
algoritmalarına üstünlük sağlar. Bu tez çalışmasında önerilen diğer bir sınıflandırma
algoritması ise olabilirlik oranı testine dayanmaktadır. Bu yöntemde kalp sesleri ve kalp
sesi olmayan kısımları belirlemek için iki hipotez belirlenir ve bu hipotezler Gauss
karışım modelleri (GKM) yardımıyla olasılıksal olarak modellenir. Bu modellere ait
parametreler kestirilirken elle etiketlendirilmiş eğitim verisi kullanılır. Önerilen bu yeni
sınıflandırma algoritması şayet elde etiketlendirilmiş veri tabanı mevcut ise literatürde
kullanılan yöntemlerden çok daha iyi sonuçlar elde dilebileceğini göstermektedir.
3
2. KURAMSAL TEMELLER
Kalp ve akciğer sesleri insan fizyolojisinin en önemli sistemlerinden solunum ve
kardiyovasküler sistemler hakkında önemli bilgiler içermektedir. Kalp ve akciğer sesleri
bu sistemlerin fiziki muayenesinin önemli parçalarıdır ve hastalıkların tanısında
hekimleri yönlendirirler. Kalp sesleri kanın kardiyovasküler sistemde hareketi esnasında
kalbin kasılma ve gevşeme safhalarında kalp kapakçıklarının kapanması sonucu oluşan
seslerdir. Kalbin çalışması sırasında sistol ve diyastol evrelerinde iki farklı ses
duyulmaktadır. Bunlardan ilki, yani birinci kalp sesi (S1) ventrikül sistolünün başlaması
ile mitral ve triküspit kapaklarının kapanmasın sonucu ortaya çıkar ve “Lab” biçiminde
bir ses olarak işitilir. İkinci kalp sesi (S2) ise ventrikül sistolünün bitiminden hemen
sonra aortik ve pulmoner semilunar kapakların kapanmasıyla ortaya çıkar. İkinci kalp
sesi “Dap” olarak işitilir, yani kalbin dinlenmesi sonucu periyodik olarak “Lab”, “Dap”
sesleri işitilir. Akciğer sesleri ise ağız ve burun yoluyla alınan havanın soluk borusu ile
bronşlara ve oradan alveollere kadar gidişi ve alveollerden tekrar ağız ve burun yoluyla
dışarı atılıncaya kadar geçtiği yollarda oluşturduğu türbülan akımlarından kaynaklanan
titreşmelerdir. Akciğer sesleri genel olarak iki farklı fazdan oluşmaktadır. Bunlardan ilki
nefes alış (inspirasyon) esnasında oluşan seslerdir ve sesin yoğunluğu bu esnasında
düzenli artar. İkincisi ise nefes veriş (ekspirasyon) esnasında oluşan seslerdir. Kalp ve
akciğerler fiziksel olarak birbirlerine çok yakın olduklarından ve çıkardıkları seslerin
frekans içerikleri birbirleri ile örtüştüğünden dolayı bu sesler birbirleri ile sürekli
etkileşim içerisindedir. Bu etkileşim kalp ve akciğer seslerinin birbirinden yalıtılmış
dinlenmesi zorlaştırmaktadır.
Gelişen bilgisayar teknolojileri ve sinyal işleme teknikleri sayesinde kalp ve akciğer
seslerinin birbirinden yalıtılmış olarak algılanmasına imkân sağlamaktadır. Bilgisayar
yardımı ile kalp seslerinin yerlerinin ortam gürültüsü veya akciğer sesleri içerisinde
tespit edilmesi birçok kalp ve akciğer sesi sinyallerinin işlenmesi ve algılanmasında en
temel adımlardan biridir. Örneğin kalp üfürümü olan bir kalp sesi incelendiğinde, kalpte
ne tür bir rahatsızlık olduğunu belirlemek için öncelikle kalp sesi sınırlarının
belirlenmesi ve bu sırlar arasında bulunan üfürüm seslerine yoğunlaşmak gerekmektedir
4
[1, 2]. Benzer şekilde kişi tanıma için kalp seslerinin kullanıldığı biyometrik sistemlerde
kalp seslerinin bölütlendirilmesine ihtiyaç duyulur. Özellikle kalp seslerinin aktif olarak
bulunduğu bölgeler (S1 ve S2 bölgeleri) kişisel bilgilerin çoğunlukla bulunduğu
bölgelerdir ve bu bölgelerden elde edilen öznitelikler kişi tanıma işlemlerinde başarılı
sonuçlar vermektedir [3, 4]. Literatürde var olan ve yukarıda örnekleri verilen yalnızca
kalp sesinin dikkate alındığı uygulamalara ek olarak, kalp seslerinin yerlerinin tespiti ve
bölütlendirilmeleri yalnızca akciğer sesinin algılanmasına ihtiyaç olduğu durumlarda da
gereklidir. Örneğin, akciğer seslerinin stetoskop ile dinlenmesi (incelenmesi) birçok
akciğer hastalıklarının tanısında önemli bir yer tutmaktadır [5]. Ancak akciğer seslerinin
dinlenmesi esnasında kalp sesleri akciğer seslerinin dinlenmesini engelleyebilir bu
durumda kalp sesleri akciğer sesleri için gürültü olarak kabul edilir ve istenmeyen sesler
olarak algılanır. Bu gibi durumlarda, akciğer sesinde kalp seslerinin olumsuz etkilerini
azalmak ve mümkünse ortadan kaldırmak gerekmektedir [6-9]. Literatürde akciğer
sesleri içerisindeki kalp seslerinin etkilerini azaltacak birçok yöntem mevcuttur. Bu
yöntemlerin çoğunluğu kalp seslerinin bulunduğu yerlerin bilgisine ihtiyaç duyarlar ve
bu algoritmaların başarıları kalp sesi sınırlarının ne kadar doğru olarak bulunduğuna
bağlıdır. Akciğer hastalıklarının tespitine ek olarak kalp seslerinden yalıtılmış akciğer
sesleri solunum akışın kestiriminde de kullanılmaktadır [10, 11]. Solunum akışının
kestirimi esnasında akciğer sesleri soluk borusundan stetoskop yardımıyla alınmaktadır.
Soluk borusundan alınan sesler içerisinde kalp sesleri aktif olarak görülmekte ve akciğer
seslerinin algılanmasını zorlaştırmaktadır. Bu durumda kalp seslerinin yerlerinin
belirlenmesi ve bunların bastırılması gerekmektedir. Kalp sesleri bastırıldıktan sonra
soluk akışının kestirimi soluk sesi yardımıyla etkin olarak yapılabilmektedir. Yukarıda
anlatıldığı üzere kalp seslerinin yerlerinin belirlenmesi ve bölütlendirilmesi gerek kalp
sesi uygulamalarında ve gerekse akciğer sesi uygulamalarında aktif olarak
kullanılmaktadır. Bu nedenle kalp seslerinin yerlerinin doğru ve işlem yükü açısından
az işlem yüküne sahip yöntemler ile bulunması oldukça önemlidir [12-14]. Akciğer sesi
içerisinde ve akciğer sesi olmaksızın kalp seslerinin yerlerinin bulunması iki temel
adımda gerçekleştirilir. Bu adımlardan ilki eldeki sinyalden öznitelik çıkarma işlemi
diğeri ise bu öznitelikler kullanılarak sınıflandırma (kalp sesi bölgesi ve kalp olmayan
bölgeler) işleminin gerçekleştirilmesidir. Her iki adımın doğru ve hızlı çalışması
önerilen yöntemlerin başarısını etkilemektedir. İstenilen özelliklerde özniteliklerin
5
bulunması için literatürde birçok çalışmalar yapılmıştır [15-23]. Bu çalışmalarda belirli
özellikler, entropi, enerji, varyans, vb. solunum sesinden çıkartılır ve kalp sesi (KS)
bölgeleri bu özniteliklerin genliğinin belirli bir eşik değeriyle karşılaştırılmasıyla
belirlenir [15, 20, 21]. Bu öznitelikler arasında, Shannon entropi özniteliğinin [24] KS
parçalarının bulunmasında en etkin ve sağlam bir özelliktir olduğu bildirilmiştir [21].
Ancak bu özniteliğin en büyük dezavantajı yüksek işlem yükü gerektirmesidir [15].
İşlem yükünün en önemli sebebi olasılık yoğunluk fonksiyonunun (pdf) tahmini ve
entropi hesaplama işlemlerinden kaynaklanmaktadır. Literatürde bulunan birçok
çalışmada [15, 17, 20, 21], pdf, çekirdek yoğunluk tahmin işlemi ile tahmin
edilmektedir, bu yöntem, histogram tabanlı pdf hesaplama yöntemlerine [25] göre daha
güçlüdür. Pdf kestiriminden sonra entropi kestirimi Monte Carlo integrasyonu
kullanılarak yapılmaktadır. Bu iki işlemin (pdf ve entropi kestirimi) her bir sinyal
çerçevesine uygulandığından bu özniteliğin işlem yükü oldukça fazladır. Literatürde,
işlem yükü açısından en verimli öznitelik, sürekli dalgacık dönüşümümün dayalı CWT
özniteliğidir [18]. Ancak, bu özniteliğin doğruluğu, yukarıda bahsedilen özniteliklerden
oldukça zayıf olduğu bildirilmiştir [15]. Literatürde var olan ve kalp seslerinin yerini
bulma işleminde kullanılan bu öznitelikler dikkate alındığında, işlem yükü az olan ve
kalp sesi yerlerini yüksek doğrulukla hesaplayabilen özniteliklere ihtiyaç olduğu açıktır.
Bu amaç doğrultusunda tezin ilk bölümünde bu tür özelliklere sahip yeni bir öznitelik
önerildi. Daha önce belirtildiği gibi, araştırmalara göre kalp seslerinin lokalizasyonu
için önerilen en güçlü öznitelik entropi özniteliğidir. Ancak, entropi özniteliğinin işlem
yükü oldukça fazladır. Bu dezavantajın üstesinden gelmek için, çekirdek yoğunluk
yaklaşımına dayalı entropi kestiriminin üst sınırını esas alan yaklaşık bir entropi ölçütü
yeni bir öznitelik olarak önerilmiştir. Önerilen bu yeni özniteliğin kalp seslerinin
yerlerinin yerlerini bulmada oldukça başarılı olduğu ve işlem yükü açısından düşük
işlem yüküne sahip olduğu bu çalışmada gösterilmiştir. Kalp sesi sinyalinin bileşenleri
(S1 ve S2) oldukça yüksek genliğe sahip olduğundan dolayı, literatürde birçok
çalışmada kullanılan sınıflandırma yöntemi uyarlanır (adaptive) eşik değerine dayalı
sınıflandırma yöntemidir. Bu yöntem ile sınıflandırma yaparken sinyalden çıkarılan
öznitelik değerleri belirli bir eşik değeri ile karşılaştırılır ve öznitelik değerlerinin eşik
6
değerini geçtiği bölgeler kalp sesi olarak etiketlendirilir [16, 18, 21]. Eşik tabanlı
sınıflandırma yöntemleri, basit ve kolay hesaplanabilir olmalarına rağmen, gürültü ve
aykırı öznitelik değerlerine karşı çok güçlü değildirler. Çünkü bu tür algoritmaların
öğrenme mekanizmaları yoktur ve bu algoritmalar analiz edilen sinyalin zaman
içerisindeki değişimine ait bilgilerini kullanmazlar.
Bu tür sorunların üstesinden gelmek için bu tezin ikinci bölümünde akciğer sesi
içerisindeki kalp sesi bölgeleri bulmak için öğrenme kabiliyeti olan yeni bir yöntem
önerilmektedir. Bu yöntemin ana fikri sınıflandırma problemlerinde sıkça kullanılan
FCM
algoritmasına
dayanmaktadır.
FCM
algoritması
sınıflandırma
işlemini
gerçekleştirirken özyineli (iterative) öğrenme kabiliyeti olmasına rağmen herhangi bir
çerçevenin sınıfı hakkında karar verme esnasında sadece ilgili çerçeveyi göz önüne
aldığı için sinyalin zaman içerisinde değişim bilgisini sınıflandırma işleminde
kullanmamaktadır. FCM algoritmasının bu eksikliği bu tez kapsamında önerdiğimiz
TFCM algoritması ile giderilirmiştir [26]. TFCM algoritması herhangi bir çerçevenin
sınıfı hakkında karar verirken yalnızca o çerçeveye değil o çerçevenin etrafındaki
çerçevelere bakarak karar verme işlemini gerçekleştirir. Bu tez çalışması kapsamında
önerilen bu yeni algoritmanın eşik değer tabanlı algoritmalara göre çok daha doğru bir
şekilde kalp seslerinin yerlerini tespit ettiği gösterilmiştir. Bu tür öğrenme kabiliyeti
olan sınıflandırma algoritmasının yanı sıra, şayet elde etiketlendirilmiş eğitim verisi
bulunuyorsa sınıflandırma algoritmalarının başarısını daha da artırmak mümkündür [20].
Bu tezin üçüncü bölümünde sınıflandırma işleminin etiketlendirilmiş eğitim verisi
kullanılarak nasıl daha iyileştirildiği anlatılmaktadır. Önerilen yöntem LRT üzerinde
temellendirilmiştir. LRT algoritması literatürde birçok alanda yaygın olarak kullanılan
bir algoritmadır [15,16]. Bu tez çalışmasında, LRT algoritmasını kalp sesi sırlarını
bulma işleminde kullandık. Önerilen yöntemde LRT iki hipotez kullanmaktadır. Bu
hipotezlerden ilki analiz edilen çerçevenin kalp sesi diğeri ise kalp sesi olmadığını
savunmaktadır ve bu iki hipotez Gauss karışım modeli (GKM) ile modellenmektedir.
Her bir modelin parametre kümesi elde bulunun etiketlendirilmiş eğitim verisi
kullanılarak kestirilir. Test aşamasında analiz edilen çerçevenin her iki modele
7
uygunluğu hesaplanır ve bu uygunluk değerleri birbirine oranlanarak olabilirlik değeri
hesaplanır. Şayet olabilirlik oranı belirli bir eşik değerini geçiyorsa bu çerçevenin kalp
sesi olduğuna karar verilir. Önerilen bu yöntem ile kalp seslerinin yerlerini literatürde
var olan yöntemlerden daha iyi şekilde bulunmaktadır.
8
3. MATERYAL ve YÖNTEM
3.1. Solunum sesi içerisindeki kalp seslerinin entropi sınırı ile tespiti
Bu çalışmada, düşük hesaplama karmaşıklığında ve yüksek doğrulukta, solunum sesi
içinde kalp sesi (KS) bölümlerinin bulunması için bir entropi sınırının kullanılması
önerilmektedir. Önerilen yöntemde parametrik olmayan bir yaklaşıma dayalı bağımsız
örnekler kullanılarak entropi tahmin edilmesi yerine, entropi için bir üst sınır
kullanılarak daha pratik ve etkili bir yaklaşım olacağı gösterilmektedir.
3.1.1. Problem tanımı ve önceki çalışmalar
Solunum sesleri kalp sesinin ve akciğer sesinin birlikte olduğu ve sadece akciğer sesinin
olduğu bölümler olmak üzere iki çeşitten oluşmaktadır. Kalp seslerinin bulunduğu
bölgeleri diğer bölgelerden ayırt eden en belirgin özellik bu bölgelerin diğer bölgelere
oranla daha yüksek varyansa sahip olmalarıdır. Sinyal işleme teorisinde, sinyalin bir
bölümünde yüksek varyansa sahip olması o bölümle ilgili belirsizliğin yüksek anlamına
gelmektedir. Bir sinyaldeki belirsizlik miktarının ölçüsü, entropi kavramıyla ilgilidir.
Bu yüzden solunum ses sinyalinin entropisi, kalp seslerinin bölümlerinin yerleri için
önemli ipuçları taşımaktadır. Bu özellik sayesinde, entropi özniteliği solunum sesinde
kalp seslerinin yerlerinin tespitinde [15, 17, 19, 21, 23] ve KS bölütlendirilmesinde [27]
sıklıkla kullanılmaktadır. Solunum sesi içinde KS bölümlerinin tespitinin genel
prosedürü aşağıdaki gibi açıklanabilir. İlk olarak, solunum sesi çerçevelere bölünür ve
her bir çerçeve için diferansiyel Shannon entropi H ( X ) aşağıdaki gibi hesaplanır;
H ( X ) p( x) log[ p ( x)]dx
(3.1)
Burada X pdf’i p(.) ile gösterilen sürekli-değerli rastlantı değişkenini gösterilmektedir.
Herhangi bir çerçevenin entropisini hesaplandıktan sonra, entropi değerine göre karar
9
mekanizması aşağıdaki gibi yapılır. Eğer H ( X , n) , n’inci çerçevenin entropisini
gösterdiği varsayılırsa. Bu çerçevenin entropi değeri ( H ( X , n) ) belirli bir eşik değerini
aştığında KS bölgesi olduğuna karar verilir, aksi takdirde KS olmayan bölge olarak
tanımlanır ve bu karar mekanizması aşağıdaki gibi yazılabilir.
H ( X , n)
burada
n'inci çerçeve KSolarak karar verilir
n'inci çerçeve non-KSolarak karar verilir
(3.2)
önceden tanımlı bir uyarlamalı eşik değeridir ve bu değer literatürdeki
çalışmalara benzer şekilde [15, 21], uyarlamalı eşik değeri entropi özniteliğinin
ortalaması ile standart sapmasının toplamı ( ) olarak hesaplanır. (3.1)’de
tanımlanan Shannon entropinin hesaplanması pdf’in bilinmediği durumda iki ana
aşamadan oluşur: Bu aşamalardan ilki ölçümler yardımıyla pdf kestirilmesi ve ikincisi
ise (3.1)’de tanımlanan integralin hesaplamasıdır.
3.1.2. Olasılık Yoğunluk Fonksiyonunun Kestirimi
Entropi tahmininin performansı ağırlıklı olarak ilgili çerçevenin pdf’nin doğru bir
şekilde kestirimine bağlıdır. Parametrik olmayan çekirdek (kernel) yoğunluk tahmini
prosedürü solunum sesi çerçevesinin pdf’ini kestirmek için aşağıda kısaca belirtildiği
gibi literatürde kullanılmıştır [21, 25]. Solunum sesinden elde edilen bir çerçevenin
örneklerinin olasılık yoğunluk fornksiyonu p(.) olan X rastlantı değişkenden geldiği
varsayılarak
kestirimi
x1 ,..., xN şeklinde
gösterilsin. Bu durumda p(.) nin çekirdek yoğunluk
aşağıdaki gibi tanımlanır.
∑
(3.3)
burada h (.) çekirdek fonksiyonunu göstermektedir. Bu çalışmada kullanılan Gauss
çekirdek fonksiyonu aşağıda verilmiştir:
10
1
h x
2 h2
e
1 x
2 h
2
(3.4)
burada h çekirdek fonksiyonunun bant genişliğini göstermektedir. Bant genişliğinin
yaklaşık değeri Gauss varsayımı altında aşağıdaki gibi tanımlanmaktadır [25].
h xK
Burada
ve
x
K
(3.5)
değeri aşağıdaki gibi hesaplanır
2
1 N
xi x ,
N i 1
4
3N
(3.6)
0.2
(3.8)
Burada ̂ değeri çerçevedeki örneklerin ortalama değerini gösterir ve aşağıdaki gibi
hesaplanır.
̂
∑
(3.7)
burada N çerçevede bulunan çekirdeklerin toplam sayısıdır.
3.1.3. Entropi kestirimi
Gerçek olasılık yoğunluk fonksiyonu
p(.) ’nin kestirimi olan f . fonksiyonu
hesaplandıktan sonra f . fonksiyonu (3.1) de p(.) yerine konularak diferansiyel
entropi kestirimi aşağıda verildiği gibi hesaplanır.
11
H kde X f x log f x dx.
(3.9)
Kestirilen f . fonksiyonu (3.3) de ifade edildiği gibi çekirdek fonksiyonların toplamı
cinsinden ifade edildiği için (3.9) verilen integralin kapalı form çözümü yoktur. Bu
yüzden (3.9) da verilen entropi bu eşitlikte verilen integralin nümerik olarak
hesaplanması sonucu bulunabilir.
Bu integral Monte Carlo yaklaşımı kullanılarak aşağıdaki gibi hesaplanabilir [28].
∑
[
]
(3.10)
(3.3) ve (3.10) tanımlanan denklemlerin birleştirilmesi ile çekirdek yoğunluk
fonksiyonuna dayalı Monte Carlo yaklaşımı ile Shannon entropisinini hesaplamasına ait
formül aşağıdaki gibi verilir.
MC
H kde
X
1
N
1
log
j 1
N
N
x
N
i 1
h
j
xi .
(3.11)
Yukarıda (3.11) de tanımlanan entropi kestirimi (3.2) de verilen karar mekanizmasında
entropi yerine yazılarak aşağıdaki gibi uygulanır.
MC
H kde
X , n
n'inci çerçeve KSolarak karar verilir
n'inci çerçeve non KSolarak karar verilir
(3.12)
Yukarıda belirtilen yöntem ile kalp seslerinin yerlerinin belirlenmesinin temel adımları
Şekil 3.1 de verilmiştir. Denklem (3.11) verilen tahminci gerçek entropi değerine
oldukça yakın değerler vermesine rağmen ana dezavantajı yüksek hesaplama
12
karmaşıklığına sahip olmasıdır [15]. Bir sonraki bölümünde çekirdek yoğunluk tahmini
ile entropi hesaplamanın karmaşıklığı azaltmak için önerilen yöntem anlatılmaktadır.
3.1.4. Önerilen yöntem
Bu bölümde, (3.9)’de tanımlanan entropi için bir üst sınır tanımlanıp ve elde edilen
yaklaşık
entropi
değerinin
kalp
sesinin
bölümlerinin
tespitinde
kullanımı
açıklanmaktadır.
3.1.4.a. Üst sınır elde edilmesi
Çekirdek fonksiyonu h .
Gauss fonksiyonu seçildiğinden dolayı, (3.3)’de
tanımlanan çekirdek yoğunluk tahminci aşağıdaki gibi yazılabilir.
N
f x
i 1
1
N x; xi , h2 ,
N
Burada N u; , 2 bir
değişken için tek değişkenli beklenen değeri
(3.13)
ve varyansı
olan Gauss pdf’ini göstermektedir. Bu tanımdan, f . fonksiyonunun eşit ağırlık
olasılıklarına sahip bir Gauss karışım olasılık yoğunluk fonksiyonu olduğu
görülmektedir. (3.13) kullanarak, (3.9)’de tanımlanan çekirdek yoğunluğu entropi
değeri aşağıdaki gibi tekrardan yazılabilir.
1 N
1 N
H kde X N x; xi , h 2 log N x; x j , h 2 dx
N
N j 1
i 1
(3.14)
Önerilen üst sınır, logaritma fonksiyonunun konkav özelliğine dayanmaktadır. [29-31].
(3.14) deki logaritma teriminin sınırı aşağıdaki gibi yazılabilir.
13
1 N
1 N
2
log N x; x j , h N x; x j , h2
N j 1
N j 1
(3.15)
Bu sonucun (3.14)’de yerine konulursa, aşağıdaki denklemler elde edilebilir.
H kde X
N
1 N
2
N
x
;
x
,
h
log N x; x j , h 2 dx
i
2
N i 1
j 1
1 N N
N x; xi , h2 log N x; x j , h2 dx
2
N i 1 j 1
(3.16)
(3.17)
2
1
1 x
log 2 h2 2
2
2 h
(3.18)
(3.19)
2
1
1
1
log 2 x log K 2
2
2
K
(3.17)’dan (3.18) elde etmek için gerekli olan ispat Ek 1’de verilmiştir. İçerisine
(3.5)’de verilen h (3.18) de yerine konulmasıyla (3.19) verilen ifade elde edilir. (3.19)
verilen ilk iki terim, varyansı
olan Gauss bir dağılımının entropisi (
) olarak
bilinir. Bu entropi aşağıdaki gibi tanımlanırsa,
(
̂ )
önerilen çekirdek yoğunluğu üst sınırı
(3.20)
aşağıdaki gibi yazılabilir.
UB
H kde X H kde
X H g X log K
1
K2
(3.21)
14
Burada
bir sabittir ve (3.8)’de tanımlanmıştır.
3.1.4.b. Önerilen karar mekanizması
Eşitlik (3.21) de entropi üst sınır olarak bulunan
olarak kullanılabilir. Bu durumda ve
değeri
nin yaklaşık değeri
’inci çerçeve için ilgili karar kriteri aşağıdaki gibi
yazılır.
UB
H kde
X , n H g X , n log K
1 KS
K 2 non-KS
(3.22)
(3.22)’nin sadeleştirilmiş versiyonu aşağıdaki gibi yazılabilir
H g X , n
n'inci çerçeve KSolarak karar verilir
n'inci çerçeve non KSolarak karar verilir
burada
yeni bir eşik değeridir. (3.23)’de, görüldüğü gibi
nin verdiği sonuçlar
ile aynıdır, çünkü
(3.23)
sabit bir değerdir ve sadece çerçeve
içindeki örnek sayısına bağlıdır.
Sonuç olarak, (3.23)’de verilen KS lokalizasyonu için önerdiğimiz karar mekanizması
aşağıdaki gibi özetlenebilir. Herhangi bir solunum sesi çerçevesi için kalp veya kalp
olmayan ses olup olmadığına karar vermek için, ilk olarak verilen çerçevedeki
örneklerin Gauss dağılımına sahip olduğu varsayımı ile (3.6) ve (3.7) tanımlanan,
ortalama ( ) ve varyans ( ) değerleri hesaplanır. Bu durumda varsayılan Gauss
olasılık yoğunluk fonksiyonu aşağıdaki gibi tanımlanabilir.
g x N x; x , x
2
(3.24)
15
Daha sonra (3.20)’de verilen formül kullanılarak diferansiyel entropi hesaplanır, ve
(3.23) verilen karar kriteri uygulanır.
entropisi kullanılarak önerilen kalp ses
tespiti yönteminin ana adımları Şekil 3.1’de verilmiştir. Bu şekilde, KDE ve GE
kısaltmaları sırasıyla
ve
entropilerinin kullanıldığı yöntemleri
göstermektedir.
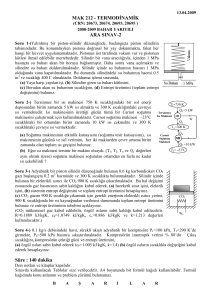
3.1.5. KDE ve GE sonuçlarının hesaplama karmaşıklığının analitik hesaplanması
Şekil 3.1’de KDE ve GE yöntemleriyle ilgili ana aşamalar ve hesaplama yükü
görülmektedir. Bu şekildeki satırlar incelendiğinde her iki yöntemin adım-1 ve adım3’de benzer hesaplama yükü olduğu söylenebilir. Ancak, KDE ve GE yöntemlerinin
adım-2 de önemli ölçüde farklı hesaplama yükü olduğu görülmektedir. KDE yöntemi
O N 2 kere çekirdek fonksiyonunu ve O N 2 kere toplama ve O N kere de
logaritmik fonksiyonunu hesaplamaktadır. Diğer taraftan, GE yöntemi
toplama ve
kere
kerede logaritmik fonksiyonunu hesaplamaktadır. Şekil 3.1 de
görüldüğü gibi önerilen GE yöntemi KDE ye göre önemli ölçüde az hesaplama yüküne
sahiptir.
16
Şekil 3.1. Önerilen ve KDE yöntemlerinin kalp ses algılama adımlar ve ilgili
hesaplamalı karmaşıklıkları
3.1.6. Hesaplama karmaşıklığı
Önceki bölümde açıklandığı gibi, önerilen yöntem, solunum sesinin her bir çerçevesinin
Gauss dağılımına sahip olduğunu varsayarak çerçevenin entropisi
hesaplanır. Bu alt bölümde
kolayca
hangi şartlar altında benzer kalp sesi
ve
algılama performansı gösterecekleri incelenecektir. Bu amaçla, Gauss kestirimiyle
ve çekirdek kestirimiyle hesaplanan pdf
hesaplanan pdf
arasındaki Kullback-
Leibler uzaklığı aşağıdaki gibi hesaplanır.
D f x || g x
f x log f x dx
H kde X
f x
dx
g x
(3.25)
f x log g x dx
(3.26)
f x log
f x log g x dx
(3.27)
17
1 h2
H kde X H g X 2 (3.28
2 x
1
H kde X H g X K 2 (0.1)
2
(3.29)
(3.28) denkleminden (3.27)’nin nasıl elde edildiği detaylı bir şekilde Ek 2’de
verilmiştir. (3.29) yeniden yazıldığında, aranılan ilişkiyi aşağıdaki gibi bulunur.
[ (
)
]
(3.30)
) Kullback-Leibler uzaklığının üst ve alt sınırlarını inceldiğimizde,
(
entropisi için yeni bir alt ve üst sınırlar hesaplanabilir.
(
) için
sınırlar aşağıdaki gibi yazılabilir.
(
)
(3.31)
Denklem (1.31)’in nasıl elde Ek 3’de verilmiştir. Bu ifade kullanılarak
entropisinin yeni alt sınırı ve yeni üst sınırı aşağıdaki gibi yazılabilir.
1
H g X log K H kde X H g X K 2 .
2
(3.32)
(3.32) de verilen üst sınır (3.21) deki sınıra göre daha sıkıdır. Bununla birlikte, her iki
tahmin edilen üst sınırlar ((3.32) de verilen alt sınırlarda) (3.22) deki karar
mekanizmasını kullandığında benzer bir performans göstermektedir. Ayrıca, (3.30)
verilen eşitlik incelendiğinde aşağıdaki gözlemler elde edilebilir.
1.
Çerçeve indeksi
yazılabilir.
olarak alındığında, (3.31) verilen ilişki aşağıdaki şekilde
18
(3.33)
(
Burada
)
,
ve
arasında bir fark
olarak kabul edilebilir.
2.
(3.31) den çıkarılan ilk gözlem
arasında doğrusal bir ilişki
ve
vardır.
3.
Eğer
nin varyansı küçükse
ve
arasındaki fark sabit
bir sayıya yakınsar ve bu sayı sadece çerçeve uzunluğuna bağlıdır. Bu durumda
ve
4.
benzer bir performansa sahiptirler.
(3.31) den elde edilen son gözlem, (3.33) deki terimler analitik olarak
hesaplanmaları mümkün olmamasına rağmen bu terimlerin nümerik olarak Monte Carlo
yaklaşımı kullanılarak aşağıdaki gibi hesaplanabilir.
(3.34)
Önerilen bu yeni öznitelik ile elde edilen sonuçlar Bölüm 4.4 de verilmiştir.
3.2. Zamansal Bulanık C-Ortalamalar Dayalı Kalp Sesi Lokalizasyonu
Bu bölüm, zamansal bulanık c-ortalamalar (TFCM) algoritmasına dayalı solunum
seslerinin içinde kalp seslerinin yerini tespit etmek önerilen yöntem anlatılmaktadır. Bu
yöntemde, ilk başta solunum sesi çerçevelere bölünür ve her bir çerçeve için logaritmik
enerji özellikleri hesaplanır. Daha sonra, TFCM algoritması bu özellikleri kullanarak
solunum sesini kalp sesinin ve akciğer sesinin birlikte olduğu ve sadece akciğer sesinin
olduğu sınıflara ayırır. TFCM algoritması bulanık c-ortalamalar (FCM) algoritmasının
değiştirilmiş versiyonudur. Karar mekanizmasında FCM algoritması sadece yerel
bilgiler kullanırken, TFCM algoritması yerel ve zamansal bilgileri beraber kullanır.
19
3.2.1. Giriş ve önceki çalışmalar
Ana KS bileşenleri S1 ve S2 algılamaları çeşitli bilgisayarlı kalp ses işleme
uygulamalarında önemli bir adımdır [2, 6, 7, 18, 32-34]. Böyle bir algılama sisteminin
ana uygulamalarından biri, solunum ses içinden kalp ses sinyalinin iptal edilmesidir.
Burada akciğer sesi, akciğer hastalıklarının tanısı için istenen sinyal olarak kabul
edilmektedir [6-9, 22, 35, 36]. Bu tür uygulamalarda, solunum sesi içinde kalp sesinin
yerini tahmin etmek için güvenilir öznitelikler ve yöntemler bulmak çok gereklidir.
Kalp sesi sinyalinin bileşenleri (S1 ve S2) oldukça yüksek bir genliğe sahip olduğundan
dolayı, literatürde çeşitli çalışmalar sadece akciğer sesi ve akciğer ile KS birlikte olan
ses parçalarını solunum sesi içinde sınıflandırmak için bir uyarlamalı eşik yaklaşımı
yöntemini kullanmaktadırlar. Uyarlamalı eşik yaklaşımında, kalp sesi yerleri hakkında
karar vermek, veri değerinin belli bir eşik değerini aşması veya altında kalmasına göre
yapılmaktadır.
Bu çalışmalar arasında, örneğin entropi, enerji ve varyans [16, 18, 21] ile çeşitli
özniteliklerin solunum sesinden ayıklanır ve KS bölümlerinin yerleri, daha sonra bu
özniteliklerin genliği belirli bir eşik değerleri ile kıyaslanması ile tespit edilir. Çeşitli
öznitelik türleri arasında, Shannon entropi özelliği kalp sesi bileşenlerinin tespiti için
diğer özellikler arasında en doğru ve sağlam bir özellik olduğunu göstermiştir [21].
Eşik tabanlı yöntemler, basit ve kolay hesaplanabilir olmalarına rağmen, gürültü ve
aykırı değerlere karşı çok güçlü değildirler. Çünkü bu tür algoritmaların etkili bir
öğrenme mekanizmaları yoktur ve bu algoritmalar analiz edilen sinyalin zamansal
bilgilerini kullanmıyorlar. Bu sorunların üstesinden gelmek için ilk çalışmamızda, KS
algılama iyi bilinen ve yaygın olarak kullanılan FCM algoritması ile gerçekleştirilir ve
solunum sesi, kalp sesinin olduğu ve kalp sesinin olmadığı iki farklı sınıfa ayrılmıştır
[19]. Bu çalışmada herhangi bir etiketli eğitim verileri kullanılmamıştır. Böyle bir
istatistiksel analiz bütün göğüs sinyali sınıflandırılıncaya kadar devam eder. Ayrıca
FCM algoritmasının, performansını artırmak için karar mekanizmasında sadece mevcut
analiz çerçeveleri değil, aynı zamanda etrafındaki çerçeveleri de göz önünde
20
bulundurarak modifiye edilebilir olduğunu göstermektedir. Böyle bir yaklaşım, geniş bir
zaman aralığı içinde FCM algoritmasının bir uygulanması olduğundan dolayı bu yeni
yaklaşıma zamansal (temporal) FCM (TFCM) algoritması olarak adlandırıldı. TFCM
algoritması, mevcut çerçeve etrafında ki komşu çerçeveler hakkında verilen kararları
homojen tutmak için zamansal kısıtlamaları dikkate alan ek bir ceza modifiye fonksiyon
terimi kullanılmıştır. Böyle bir geliştirme doğrudan TFCM algoritmasına ait üyelik
fonksiyonlarının ve küme merkezlerinin güncellemesini sağlamakta ve kalp seslerinin
yerlerini bulma performansını artırmaktadır.
3.2.2. Özellik çıkarma ve düzgünleştirme
Bu bölümde iki tür özellik: entropi [37] ve logaritmik enerji ve onların
düzgünleştirilmiş halleri kullanıldı.
3.2.2.a. Logaritmik enerji özelliği
İlk başta solunum sesi 20 ms çerçevelere uzunluğunda ve yandaki çerçeveyle %50
örtüşmeyle bölünür ve her bir çerçeve için logaritmik enerji aşağıdaki gibi hesaplanır.
1 N
2
E k ln s k , i ,
N i 1
, k’inci çerçevenin logaritmik enerjisi olarak hesaplanır ve
(3.35)
solunum sesi ve
N çerçevedeki örnek sayısıdır.
3.2.2.b. Entropi özniteliği
Literatüre de anlatıldığı gibi KS lokalizasyon görevler için Shannon entropi özelliği
güçlü bir özelliktir. Bu nedenle, solunum sesinin her çerçeve için olasılık yoğunluk
fonksiyonu parametrik olmayan, normal çekirdek tahmini [21, 25] kullanarak
21
hesaplanarak, Shannon entropi özelliğini nasıl hesaplandığı Bölüm 3.1.3’de verilmiştir
hesaplanmıştır.
3.2.2.c. Öznitelik değerlerinin düzgünleştirilme işlemi
Deneysel sonuçlar, KS lokalizasyon işlerinde düzleştirme işlemi çok faydalı olduğunu
göstermektedir. Bu nedenle bu çalışmada elde edilen özeliklerin düzgünleştirilmiş
sürümü aşağıdaki gibi elde edilmektedir. Düzleştirme aşaması sıfır-fazlı kesim frekansı
12 Hz ayarlanmış alçak geçiren filtre ile gerçekleştirilmiştir. Filtresi olarak İkinci
dereceden Butterworth IIR filtre kullanılmıştır. Sıfır faz için, filtreleme ileri doğrultuda
gerçekleştirilir; filtrelenmiş dizi daha sonra ters çevrilip ve aynı filtreden geçirilerek geri
çalıştırılır.
3.2.3. FCM lokalizasyon metodu
FCM Algoritması [38], iyi bilinen kümeleme algoritmalarından biridir ve etkili bir
şekilde çok sayıda sınıflandırma uygulamalarında kullanılan bir yöntemdir [19, 39-41].
FCM Algoritması bir karesel amaç fonksiyonunu minimize ederek nesne verilerini
istenilen sayıda kümelere ayırır. Bu çalışmada, öncelikle FCM algoritması kullanılarak
solunum sesi içerisinde KS sinyalinin tespiti incelemiştir. FCM algoritması yararlı bir
kümeleme metodu olmasına rağmen olumsuz bir yönü de vardır; o da çerçeveleri
sınıflandırmak için herhangi bir zamansal bilgi kullanmaksızın sadece analiz altındaki
çerçeveleri dikkate alarak gerçekleştirmesidir. Solunum sesine ait veriler, zamansal
alanda önemli ipuçları taşır ve komşu çerçeveler birbiriyle yüksek oranda ilişkilidirler.
Dolayısıyla bu çalışmada, FCM algoritmasını geliştirip sınıflandırma yaparken
zamansal bilgileri kullanarak aynı küme içine benzer özelliklerin toplaması sağlanır.
FCM algoritmasının maliyet fonksiyonunu aşağıdaki şekilde verilmektedir.
22
c m
2
uik xk vi ,
k 1 i 1
N
minimize
U ,V
c
K.S.
u
i 1
ik
k 1,..., N ,
1,
(3.37)
2
x j vi m1
U ij
,
k 1 x j vk
c
U uij , uij 0,1 , uij 1, 1 i c ,
i 1
c
u
N
Vi
j 1
N
m
ij
u
j 1
(3.38)
xj
m
,
(3.39)
ij
Burada U ij ve Vi sırasıyla üyelik fonksiyonları ve küme merkezlerini göstermektedir.
3.2.4. TFCM lokalizasyon metodu
FCM lokalizasyon metodunun görüntü sınıflandırma performansını artırmak için
Chuang ve ark. [42] FCM algoritmasının üyelik fonksiyonunu değiştiren yeni bir
yöntem tanıtmışlardır. Bu yöntemde, komşu pikseller üyelik fonksiyonunun
hesaplanmasını etkilemektedirler. İlk çalışmamızda [19], benzer bir yaklaşım
kullanarak, kalp çerçevelerinin zamansal tutarlılığını artırmak için üyelik fonksiyonunu
geliştirdik ve bu yöntemi TFCM algoritması olarak adlandırdık. Homojen bir bölgede
(KS veya non-KS) zamansal bilgiler kullanılarak sadece orijinal üyelik fonksiyonu
kuvvetlendirilir ve kümeleme sonuçları değişmeden kalır. Fakat KS ve non-KS sınırı
arasındaki bir çerçeve için, onun komşu çerçevelerini etiketleyerek kümenin ağırlığını
azaltır. Bu çalışmada, eski amaç fonksiyonu içine bir zamansal kısıt terimi ekleyerek
önerilen TFCM algoritması değiştirilmiştir. İlk çalışmamıza göre bu yeni amaç
fonksiyonu kullanmanın en önemli avantajı, her iterasyon adımında doğrudan üyelik
23
fonksiyonları ve küme merkezleri geliştirilmektedir ve bu değişim daha iyi
sınıflandırma performansı elde etmeyi sağlamaktadır. TFCM yöntemin özeti Çizelge
3.1’de verilmiştir
N
minimize
U ,V
c
uikm xk vi
2
k 1 i 1
c
K .S . uik 1,
N
c
uikm
k 1 i 1
k 1
n k 1
xn vi
2
(3.40)
k 1,..., N ,
i 1
{
Ki
üyelik matrisini ve
}
} küme merkezlerin
{
göstermektedir. | | ise pencere uzunluğunu göstermektedir. m, her bulanık üyelik
üzerindeki ağırlık değeri göstermektedir.
ve
’inci iterasyondaki üyelik fonksiyonu
’inci iterasyondaki küme merkezleri
k l
t 2
x
v
xn vit
j
i
c
n k l
uikt
2
k l
t
j 1
x
v
xn vjt
j
j
n k l
k , p 1,..., N , i 1,..., c .
n
vit 1
k 1
uikt
m
xj
k l
x
n k l
1 uikt
i 1,..., c .
n
m
n
aşağıda verilmektedir.
1
m1
,
2
2
(3.41)
,
k 1
(3.42)
3.2.5. Önerilen yöntemin ilklendirilmesi ve sonuç kararları
FCM bazlı sınıflandırma algoritmalarından hızlı ve doğru sınıflandırma performansı
elde etmek için küme merkezlerini iyi bir başlangıç noktasından başlatmak
gerekmektedir [43, 44]. Önerilen çalışmada KS lokalizasyon metodu FCM
algoritmasına bağlı olduğundan, iyi bir başlangıç noktasından başlaması avantajlıdır. Bu
24
nedenle, eşikleme özelliğine dayalı entropi yöntemi [21] kullanılarak önerilen
algoritmalar başlatılmıştır. Solunum sesine ait bir çerçevenin özellik değeri belirli bir
eşik değerini aştığında KS çerçevesi olduğuna karar verilir, aksi takdirde non-KS
çerçevesi olarak adlandırır. Bu sınıflandırma sonuçlarına göre, önerilen yöntemlerin ilk
küme merkezleri oluşturulur. Başlatma yöntemin özeti Çizelge 3.2’de verilmiştir. FCM
bazlı sınıflandırma algoritmaları yumuşak sınıflandırma yöntemi olarak bilinir, diğer
yönden üyelik seviyelerine göre her çerçeve iki kümelere (KS ve non-KS) aittir.
Yumuşak sınıflandırma sonuçları sabit sınıflandırma sonuçlarına dönüştürülebilir.
Solunum sesinin her bir çerçevesi için hesaplanan üyelik fonksiyonlarından (3.40) biri
alınır ve belirli bir eşik değeriyle karşılaştırılarak farklı kümeler halinde sınıflandırılır.
Bulanık üyelik derecesi belirli bir eşik değerini aştığında KS çerçevesi olarak karar
verilir, aksi takdirde kalp olmayan ses çerçevesi olarak adlandırılır.
Çizelge 3.1. Önerilen TFCM algoritmasına dayalı kalp sesi lokalizasyonu
TFCM algoritması
Başlatma:
Adim 1: Küme merkezleri başlat ve t 0 , c 2 ,
ve l 4 ayarla.
Özyineleme:
Adim 2: t t 1
Adim 3: Üyelik fonksiyonları hesapla.
Adim 4: Kümelerin merkezlerini yenile
Adim 3: Eğer V t 1 V t iterasyonu durdur. Aksi takdirde, Adım 2 e git.
Sert sınıflandırma:
Eğer Üyelik değerleri sabit bir eşik değerinden büyükse KS e karar ver, aksi takdirde
non-KS karar ver.
25
Çizelge 3.2. Önerilen algoritmaların ilklendirilmesi
Adim 1: Solunum sesinde bir parça alır ve çerçevelere bölünür.
Adim 2: Her çerçeve için öznitelik değerleri hesaplanır.
Adim 3: Hesaplanan her çerçevenin öznitelik değerlerinin ortalama ( ) ve standart
sapma ( ) değerleri hesaplanır.
Adim 4: Eşik değerini 2 olarak seçilir.
Adim 5: Eğer öznitelik değerleri hesaplanan eşik değerinden büyükse KS e karar
verilir, aksi takdirde non-KS olarak karar verilir.
Adim 6: Kümelerin merkezlerini bu değerlerine göre hesaplanır.
3.3. Olabilirlik Oranı Testi (LRT) ile Birlikte Maksimum a Posterior Adaptasyon
Esas Alan Yöntem
Bu bölüm de akciğer sesleri içerisindeki kalp seslerinin yerleri olabilirlik oranı testine
(LRT) dayalı bir yöntem ile bulunmaktadır. Her bir hipotez GKM ile modellerin ve
modellerin parametreleri test kişisinden veriler geldikçe uyarlanır ve bu sayede kişiden
bağımsız modellerden kişiye bağımlı modeller elde edilmeye çalışılır. Önerilen
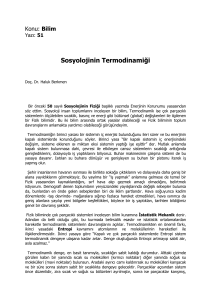
yöntemin ana blok diyagramı Şekil 3.2’de gösterilmektedir. Bu şekilden görüldüğü gibi,
amaçlanan yöntem iki ana aşamadan oluşmaktadır: eğitim ve test. Eğitim aşamasında,
öznitelik seti solunum seslerinden çıkartılır ve başlangıç model parametreleri iterative
maksimum olabilirlik (EM-ML) algoritması kullanılarak mevcut eğitim verilerinden
öğrenilir. Test aşamasında, algoritma çevrimiçi durumda 2 s uzunluğunda test verisini
alır. Öznitelik çıkarma aşamasından sonra, kalp sesleri (KS) başlangıç model parametre
setiyle tespit edilir. Amaçlanan yöntemin test aşaması, gözlemlenen test verilerini
kullanarak başlangıç model parametrelerini uyarlama yeteneğine sahiptir. Uyarlama
aşaması EM algoritmasına bağlı MAP yaklaşımıyla gerçekleştirilir. Önerilen yöntemin
ana aşamaları aşağıdaki bölümlerde detaylı olarak açıklanmaktadır.
26
3.3.1. Öznitelik çıkarma
Solunum sesi 20 ms lik pencere uzunluklarında birbirleri ile %50’si örtüşecek şekilde
çerçevelere bölünür ve her çerçevenin enerjisi aşağıdaki formül yardımıyla hesaplanır.
1 N
2
zk ln s k , i ,
N i 1
Burada
,
çerçeveye ait logaritmik enerjiyi ifade eder,
solunum sesidir ve N çerçevenin uzunluğudur.
(3.43)
çerçeve içerisindeki
27
Şekil 3.2. Önerilen yöntemin ana blok diyagramı
28
Bu çalışmada, çıkarılmış öznitelik değerleri üzerinde aşağıda anlatıldığı gibi
düzgünleştirme (smoothing) yapılmıştır. İlk olarak kesim frekansı 12 Hz olan sıfır fazlı
alçak geçiren (Butterworth IRR) filtre kullanılmıştır. Sıfır faz için, filtreleme işlemi önce
ileri yönde gerçekleştirilir daha sonra filtrelenen kısım terslenir ve aynı filtreleme işlemi
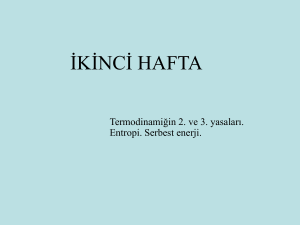
tekrar uygulanır. Ortalama akış hızındaki solunum ses parçası ve çıkarılan logaritmik
enerji özniteliği (düzgünleştirilmiş versiyonu ile birlikte) sırasıyla Şekil 3.3(a) ve Şekil
Genlik
3.3(b) ile gösterilmektedir.
Genlik
Zaman
Çerçev
e
Şekil 3.3. Orta akış hızındaki solunum ses parçası ve uygun logaritmik enerjiye
(düzgünleştirilmiş versiyonu ile birlikte)
3.3.2. Olasılık modellerin tanımlanması
Bu çalışmada, KS belirleme işlemi varsayım test etme problemi olarak tanımlanmıştır.
Bu amaçla
H0 ve H1 varsayımı aşağıdaki gibi tanımlanmıştır [45, 46].
H0 : Ölçülen solunum sesleri sadece akciğer sesi içerir (non-KS).
29
H1 : Ölçülen solunum sesleri akciğer sesiyle beraber kalp sesi de içerir (KS).
Önerilen yöntemde
H0 ve H1 varsayımlarının olasılık yoğunluk fonksiyonları sırasıyla
pzk |H0 .| H 0 ve pzk |H1 .| H1 olarak ifade edilmektedir. Varsayımların olasılık
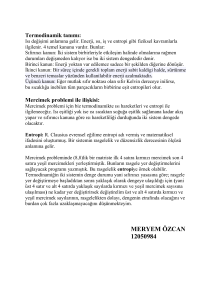
yoğunluk fonksiyonlarının şeklini tahmin etmek için, solunum sesinden elde edilen
logaritmik enerji özniteliğinin histogramı incelendi. Örnek olarak Şekil 3.4’de veri
tabanımızda bulunan bir kişinin soluk sesine ait KS ve non-KS kısımlarının histogramı
gösterilmektedir. Bu şekilden KS ve KS olmayan kısımların dağılımının çoklu model
dağılım şekline sahip olduğu gözlemlenmiştir.
Şekil 3.4. KS ve non-KS çerçevelerin histogramları ve tahmin edilmiş GKM pdf’leri
Bu yüzden bu çalışmada her varsayım için olasılık yoğunluk fonksiyonları
pzk |H0 .| H 0 ve pzk |H1 .| H1 GKM kullanılarak aşağıdaki gibi modellenmiştir [4749].
30
p zk | H j z k | H j
p zk | i, H j
Mj
p z
i 1
ij
k
| i, H j
j 0,1
N zk ; ij , vij formülü ortalaması
Gauss bileşenini ifade eder.
(3.44)
ve varyansı
olan j. modelinin tek
parametresi j modelin i Gauss karışım yoğunluğunun
ağırlığını ifade eder.
3.3.3. Başlangıç model parametrelerinin belirlenmesi
Önceki bölümde açıklandığı üzere, her varsayımın olasılık yoğunluk fonksiyonu bir
GKM ile modellenir. j. model için parametre seti j ij , ij , vij
Mj
i 1
ile ifade edilirken,
M j , j modeldeki karışım bileşenlerinin sayısını göstermektedir. Varsayılan iki model
için toplam parametre seti 0 , 1 denklem (3.45) ile ifade edilir:
i 0 , i 0 , vi 0 i 10 , i1 , i1 , vi1i 11
M
M
(3.45)
Bu çalışmada, maksimum olabilirlik (ML) yöntemi ile aşağıdaki gibi tahmin edilir.
ML
arg max p Z |
(3.46)
Burada Z veri tabanında bulunan eğitim verisini göstermektedir. Denklem (3.46)’nın
maksimizasyonu EM algoritması yardımıyla bulunur [50].
3.3.4. LRT ile kalp sesine ait kısımları tespit etme
Her iki varsayıma ait model parametreleri biliniyor ise optimum karar mekanizması
aşağı verilen olabilirlik oranı hesaplanması ile elde edilir [51].
31
zn
Burada
pzk |H1 zn | H1
pzk |H0 zn | H 0
kabul H1
ret H 0
n. andaki öznitelik değerini göstermektedir.
(3.47)
ise önceden tanımlanmış eşik
değeridir. LRT’nin tanımı istatiksel test içerisindeki gözlemlerin birleştirilmesi ile
kolaylıkla genelleştirilebilir. Bu durum karar mekanizmasının performansı ve sağlamlığı
artırır. Çoklu gözlemlerle beraber LRT’nin genelleştirilmesi şu şekilde yapılır:
gözlemlenen
Z n etrafındaki kayan pencere içerisinde 2m 1 gözlemden oluşturulmuş
Zn,m ifadesi aşağıdaki gibi tanımlanırsa
Zn,m znm ,..., zn ,..., znm .
burada
(3.48)
pencere uzunluğunun yarısını göstermektedir. Çoklu gözlemlerle birlikte LRT
denklemi aşağıdaki gibi tanımlanır.
pzn ,m |H1 Zn,m | H1
Z p
n,m
zn ,m | H0
Z
n,m
| H0
(3.49)
zn Zn,m olmak üzere her gözlemin bağımsız olduğunu varsayılırsa, bu durumda
denklem (3.49) düzenlenerek (3.50) elde edilir:
pzk |H1 zk | H1
nm
Z
n,m
k n m
p zk | H 0 z k | H 0
(3.50)
Denklemin her iki tarafının logaritması alınırsa denklemin yeni hali aşağıdaki gibi olur.
ln,m
nm
k n m
ln
pzk |H1 zk | H1
pzk |H0 zk | H 0
(3.51)
32
Bununla beraber, eğer k | H j ve k denklem (3.52 ve 3.53)’de verildiği gibi
tanımlanırsa:
k | H j ln pz |H zk | H j
k
j
j 0,1
k k | H1 k | H 0
(3.52)
(3.53)
Denklem (3.51) aşağıdaki gibi yazılabilir.
ln,m
nm
k .
(3.54)
k nm
Sonuç olarak, çoklu gözlem kullanılarak LRT ye dayalı karar mekanizması aşağıdaki
gibi ifade edilir.
ln,m
n 'inci çerçeve HS dir
n 'inci çerçeve non-HS dir
(3.55)
3.3.5. EM-MAP’e dayalı başlangıç parametrelerinin çevrimiçi adaptasyonu
Genellikle, eğer yeterince eğitim verisi varsa kişiye bağımlı modeller kişiden bağımsız
modellerden daha iyi performansı sağlar. Bununla beraber yeterli sayıda kişiye bağımlı
eğitim verisi elde etmek genellikle zordur. Bazı durumlarda, bir kişiye ait yeterince
eğitim verisi yoktur. Bu yüzden, eğitim aşamasında kişiden bağımsız mevcut verileri
kullanmak zorunlu olur ve bu veriler, olabilecek bütün kişi varyasyonlarını
kapsamalıdır. Eğer eğitim modelleri ve test edilen kişi modelleri arasında uyumsuzluk
olursa modeller ile elde edilen performans azalır. Yapılan çalışmada bu zorluğun
üstesinden gelmek için, çevrimiçi olarak çalışan etkili bir adaptasyon algoritması
33
geliştirmeyi amaçlandı. Amaçlanan adaptasyon işlemi aşağıda verilen gerçekçi
varsayımlara bağlıdır:
1.
İlk olarak, test işlemi yapılacak kişi için yeterince eğitim verisi olmadığı, ve diğer
kişilere ait eğitim verileri Z Train ve bu verilere ait etiket verileri S Train ’nin var olduğu
varsayılır.
2.
İkinci olarak test edilecek kişiden alınan yaklaşık 2 s uzunluğunda test verisi Z Test
`nin mevcut olduğu varsayılır.
Bu varsayımlar altında, önerilen adaptasyon işleminin adımlar aşağıdaki gibi olur.
Yaptığımız ilk kabule göre, kişiden bağımsız (SI) etiketli eğitim verilerine elimizde
mevcut ve SI-GKM’leri (KS ve non-KS solunum kısımları için) bu verileri kullanarak
EM–ML algoritması ile eğitilebilir. Pr bütün başlangıç parametrelerini ifade etsin.
İkinci varsayıma göre, yaklaşık 2 s uzunluğunda hedef kişiye ait Z Test test verilerinin
çok az bir kısmına sahibiz ve bu test verileri KS kısımlarının yerlerini tahmin etmek ve
başlangıç model parametreleri adapte ederek amaçlanan kişi model parametrelerine
benzetmek için kullanılır. Bu şartlar altında, S
Test
test verileri için KS kısmının yeri
başlangıç SI model parametreleri Pr kullanılarak tahmin edilebilir.
Aslında bu tahmin edilen KS verileri kullanılarak EM-ML algoritması tarafından
hedeflenen kişinin SD model parametreleri tahmin edilebilir. Ancak hedeflenen kişi
verilerinin Z Test çok az bir kısmının burada kullanıldığı için kişiye ait SD model
parametrelerin eğitimi iyi bir şekilde yapılamayacak ve S
Test
içerisinde bazı yanlış
etiketlemeler olacaktır. Bu zorluğun üstesinden gelebilmek için, hedeflenen kişi model
parametreleri MAP tahmin işlemi tarafından tahmin edilir. Bu işlem bizim
durumumuzda olduğu gibi yeterince eğitim verisi olmadığı zamanlar için çok
kullanışlıdır. MAP’e bağlı parametre tahmini aşağıda gösterildiği gibidir [52].
34
MAP
arg max p | Z
(3.56)
arg max p Z | p
Bu çalışmada hedef kişinin model parametreleri (MAP adaptasyonu olarak bilinen)
uyarlanmış MAP tabanlı parametre tahmin işlemi ile tahmin edilir. Modifiye
aşamasında kişiden bağımsız (SI) başlangıç model parametresleri Pr bir önceki model
olarak kullanılır ve kullanılan bu önceki model, Z Test test verilerinden yeterli
Ml
Ml
Ml
istatistiklerin çıkarılması aşağıdaki gibi yapılır. i , i ve vi
sırasıyla hedef kişiye ait
modelin i. karışımı (KS ve kalp sesi olmayan) için ağırlık ortalama ve varyans ile ilişkili
yeterli istatistikler olduğu varsayılırsa bu değerler aşağıdaki gibi hesaplanır.
Ml
i
1 K
ik ,
K k 1
(3.57)
K
Ml
i
k 1
K
k 1
K
Ml
vi
z
ik k
(3.58)
,
ik
k 1
K
k 1
Denklemlerde yer alan,
.
Ml 2
ik zk i
(3.59)
ik
ik
modelin i karışımına ait sorumlu olasılıktır. Z Test
Ml
Ml
Ml
Ml
verilerinden yeterli istatistiklerin tahmini yapıldıktan sonra i , i , vi
Mj
i 1
,
adapte edilmiş model parametreleri, test verilerinden tahmin edilen model parametresi
Ml ve başlangıç model parametresi Pr ’nin kombinasyonu ile bulunur. Kişiden
35
bağımsız adaptasyon (ASI) parametreleri modelin i. karışımı için aşağıdaki formüller
kullanılarak tahmin eder.
Adp
i i 1 i i ,
(3.60)
Adp
i i 1 i i ,
(3.61)
i
i
Adp
vi
Ml
Pr
Ml
Pr
Adp
Ml 2
Adp
Pr 2
Adp
Pr
i vi i i 1 i vi i i .
i
Denklemlerde yer alan
(3.62)
önceki ve yerel parametrelerin katkısını dengelemek için
kullanılan ağırlık faktörüdür ve denklem (3.63) ile ifade edilir:
K
i
k 1
K
k 1
ik
,
(3.63)
ik
, r
Burada r sabiti uygunluk faktörüdür. (3.57-3.63) ile verilen formüller çevrimiçi
adaptasyon formülleridir ve daha anlaşılır olması için iterasyon terimi kullanmaksızın
basitleştirilmiştir. Amaçlanan algoritmanın tam versiyonu çevrimiçi çalışır ve
adaptasyon işlemi sırasında, SI model parametreleri zamanla ASI model parametrelerine
dönüşür. Dolayısıyla parametreler zamanla hedef kişinin SD modeline daha yakın olur.
Algoritmanın tam versiyonu EM-MAP olarak adlandırılır ifade edililir ve Çizelge
3.3’de verilmiştir.
36
Çizelge 3.3. Önerilen algoritmaların adımları
Giriş: Başlangıç parametrelerin girilmesi
̂
{
}
{
Başlatma: Verilen veriler
̂
{
}
}
{
}
, başlangıç olabilirlik
karışım bileşenlerinin sayısı
başlangıç parametreler
} Maksimum iterasyon sayısı MIterNum=2
{
ve uygunluk faktörü r=15.
Adaptasyon Özyineleme: Adım 1: t=t+1
,̂
Adım 2: Test verilerinin etiketlerinin
{̂
Adım 3: Verilerin olasılığının hesaplanması
Adım 4: Eğer (
̂
} tahmin edilmesi
|̂
(
̂
)
veya (IterNum=MIterNum) Adım 9 git
)
Adım 5: IterNum = IterNum+1.
Adım 6: ̂
Adım 7: Her
iki sınıflar ayrı
bakarak
{
} ve
{
{
}̂
{
} ve
{
}
E-Adım: Posterior olasılıkların tahmini
tahmin edilmesi
̂
(|
)
M-Adım: Yeni parametre değerlerinin tahmini.
Kj
Ml ( t )
ij
Kj
1
Kj
k 1
Ml ( t )
(k )
ijk
, ij
k 1
Kj
(k ) j
ijk k
z
k 1
Kj
v
Ml ( t )
ij
k 1
(k )
ijk
Ml ( t )
( z ij
j
k
Kj
k 1
(k )
ijk
,
(k )
ijk
Kj
)
2
, ijMl (t )
}
k 1
Kj
k 1
A-Adım: Yeni uyarlanmış parametre değerleri tahmin.
(k )
ijk
(k )
ijk
,
r
37
Adp ( t )
ij
Adp ( t )
vij
Ml ( t )
ijMl (t ) ij
ijMl (t ) vij
Ml ( t )
Pr( t )
1 ijMl (t ) ij
Adp ( t )
( ij
Ml ( t )
ij
Adp ( t )
, ij
̂
ve Adım 1 git.
Adım 9: Dur.
Çıkışı: Nihai parametre seti ̂
Pr( t )
1 ijMl (t ) ij
,
Adp ( t )
Pr( t )
Pr( t )
)2 1 ijMl (t ) vij ( ij
ij )2 ,
Endin bitişi
Adım 8: ̂
Ml ( t )
ijMl (t ) ij
ve etiketleri ̂
38
4. ARAŞTIRMA BULGULARI
4.1. Veri tabanı
Bu çalışmada kullanılan veri tabanı, solunum problemi olmayan 3 yaş grubu [6-15],
[15-25] ve [25-50] olmak üzere 8’i kadın 24 sağlıklı kişiden alınan solunum seslerinden
oluşmaktadır. Çalışma Atatürk Üniversitesi Sağlık Bilimleri Enstitüsü Etik Kurulu
tarafından onaylanmıştır. Deneyler yapılmadan önce bütün katılımcılar kabul formunu
imzalamıştır. Solunum verileri bir kontak mikrofondan (TSD108, Biopac) elde edilen
seslerin amplifikatör (DA100C, Biopac) ile yükseltilmesi ile kaydedildi. Kayıt
esnasında mikrofon sağ akciğer üst lob da 2. ve 3. kaburga boşlukları arasına
yerleştirilmiştir. Solunum sesi ile birlikte eşzamanlı olarak solunum akış miktarı ve
elektrokardiyografik sinyallerde TSD117 (Biopac) ve ECG100C (Biopac) cihazları
yardımıyla kayıt edilmiştir. Bütün kişiler orta hava akış hızlı veriler için [7.5–15]
ml/s/kg ve düşük akış hızlı veriler için 7.5 ml/s/kg’dan az solunum yapmaları hakkında
bilgilendirilmiştir. Her kayıt ortalama 20 s sürmektedir. Kayıt işlemleri sırasında, sabit
koşulları sağlamak için bütün kişiler bir sandalye üzerinde sabit olarak oturtulup nefes
almaları istenmiştir. Ayrıca bir burun klipsi kullanılarak burun yoluyla havanın kaçması
engellenmiştir.
4.2. Veri tabanının etiketlenmesi
Önerilen algoritmanın performansını ölçmek için, yukarıda anlatılan veri tabanındaki
kalp seslerinin yerleri el ile belirlenir. Veri tabanın el ile etiketlenmesi bir kardiyolog
kontrolünde eğitimli 3 kişi tarafından dikkatlice incelenerek yapılmıştır. Etiketleme
Wavesurfer [23] ara yüzü kullanılanılmıştır. S1 kalp atışlarının başlangıç sınır yerleri
için ECG dalga formunda R-tepe yerleri kullanılmıştır. Diğer sınırlar solunum sesini
dinleyerek, spektrum ve zaman dalga formunda inceleme yapılarak bulunur. Örneğin,
solunum sesinin küçük bir kısmı için spektrum ve ECG dalga formu Şekil 4.1’de
39
gösterilmiştir. El ile etiketlenmiş sınırlar (dikey kırmızı çizgiler) solunum sesi, spektrum
Genlik
ve ECG dalga formu üzerine bindirilmiştir.
Genlik
(a)
Ferekans
(b)
(c)
Zaman
Şekil 4.1. (a) Solunum sesinin küçük bir kısmı (b) ve (c) ECG ve spektrum dalga formu
4.3. Performans değerlendirmeleri ölçütleri
4.3.1. Ortalama hata ölçütleri
Yöntemlerin performansını ölçmek için, dört sayısal sonuç hesaplanmıştır: (1) doğrupozitif (TP) KS çerçeveleri algoritma tarafından doğru tespit edildiğinde; (2) doğrunegatif (TN) non-KS çerçeveleri algoritma tarafından doğru tespit edildiğinde; (3)
40
yanlış-negatif (FN) KS çerçeveleri algoritma tarafından bulunamamışsa; (4) yanlışpozitif (FP) non-KS çerçeveleri algoritma tarafından KS olarak algılandığında
hesaplanır. Önerilen algoritmaların genel performansını değerlendirmek için, FNR ve
FPR değerleri aşağıdaki gibi hesaplanır.
FNR
FN
100
TP FN
(4.1)
FPR
FP
100
TN FP
(4.2)
FN ve FP sırasıyla, yanlış negatif ve yanlış pozitif çerçeve sayısını göstermektedir. TN
ve TP sırasıyla, doğru negatif ve doğru pozitif çerçeve sayısını göstermektedir.
4.3.2. Hata algılama denge grafiği (DET)
Belli bir özel eşik değer altında elde edilen FPR ve FNR değerleri, literatürde kullanılan
KS bulma algoritmalarının [15, 21] performansını ölçmek için yaygın olarak
kullanılmaktadır. Fakat bu değerler yöntemleri karşılaştırmak için yeterli değildir,
çünkü belirli FNR ve FPR değerleri, sistemin performansını sadece seçilen eşik değeri
için hesaplanmıştır ve eşik değeri değiştirildiğinde sistemin performansı önemli ölçüde
değişmektedir [19]. Ayrıca, KS lokalizasyon işlerinde FNR ve FPR arasında bir tercih
söz konusu olabilir ve aynı zamanda sistemin performansını değerlendirmek için bu
tercihin sonuçlarını görmek istenen bir durumdur. Bu zorlukları aşmak ve yöntemleri
daha iyi karşılaştırmak için performans ölçüsü olarak DET eğrisini kullandık. Kalp sesi
lokalizasyonu işlerinde, KS bölgelerini bulmak non-KS bölgelerini bulmaktan daha
önemli olduğundan, Şekil 4.2’de görüldüğü gibi DET eğrisinin sağ alt tarafta bulunan
eğri üzerinde ki bir nokta (Örneğin C noktası) bir çalışma noktası olarak seçilir.
41
Şekil 4.2. Hata algılama denge grafiği
4.3.3. Geçen süre
Deneysel olarak her yöntemin hesaplama karmaşıklığını ölçmek için 20 saniyelik
sonulum sesi içerisindeki kalp seslerinin yerlerini bulmaya harcadığı süre, MATLAB
programının (R2011b-32bit-win32) tic ve toc fonksiyonları yardımıyla ölçülmüştür.
Ayrıca, yöntemlerin gerçek zamanlı performansını analiz etmek amacıyla bu süre
normalize edilerek normalize geçen zaman hesaplanmıştır. Normalize geçen süre, her
geçen süre 20 saniye bölünmesi ile hesaplanmıştır. Tüm deneyler aynı bilgisayarda
(Intel Core i7-2600 CP processer 3.4 GHz @, 16.0 GB RAM) ve aynı deney koşulları
altında yapılmıştır.
4.3.4. Önemlilik testi
Bu çalışmada kalp sesinin tespiti için kullanılan iki yöntemi karşılaştırmak için
önemlilik testi yapılmıştır [25]. Hangi yöntemin daha iyi performans sağladığını bulmak
42
için her bir yöntem den elde edilen DET eğrileri altındaki normalize edilmiş alanlar
karşılaştırılır. Bu çalışmada önemlilik testleri p 0.01 seviyesinde yapılmaktadır. Bu
testlerde, her kişi için bulunan NAUC değeri bağımsız bir örnek olarak
değerlendirilmiştir.
4.4. Entropi Sınırına Dayalı Yöntemin Deneysel Sonuçları ve Tartışması
Bu alt bölümde, Entropi sınıra dayalı önerilen yöntem ve literatürdeki çeşitli yöntemler
için elde edilen sonuçlar yukarıda anlatılan veri tabanı kullanılarak karşılaştırılmaktadır.
Bütün şekillerde ve çizelgelerde hesaplanan ortalama ve standart sapma değerleri, 20
deneğe ait verilerden elde edilmiştir. Literatürde [15, 21] olduğu gibi solunum sesi 20
ms pencere uzunluğu ile %50 örtüşme ile çerçevelere ayrılmış ve performans analizi
için solunum sesleri, düşük ve orta nefes hızlarında incelenmiştir. Daha iyi
değerlendirme ve karşılaştırma için, deneysel sonuçlar iki alt bölümlere ayrılmıştır. İlk
alt bölümde
arasındaki ilişkisi deneysel olarak incelenmiştir. İkinci
ve
alt bölümde ise, çekirdek tabanlı yöntem ve literatürde verilen diğer yöntemlerin
lokalizasyon performansları önerilen yöntem ile ayrıntılı olarak karşılaştırılmıştır.
4.4.1.
,
ve
arasındaki ilişki
Bu alt bölümde, (3.34)’de verilen
,
ve
arasındaki ilişkiler
deneysel olarak aşağıdaki gibi incelenmiştir.
4.4.1.a.
ve
arasındaki ilişki
Şekil 4.3(a) ve Şekil 4.3(b) sırasıyla, solunum sesi ve bu ses den elde edilen
ve
entropi değerlerini göstermektedir. Bu şekillerden gözlendiği gibi,
’nin arasında yüksek bir ilinti bulunmaktadır ve solunum sesinin bir çerçeve
ve
için
,
’nin bir üst bir sınır gibidir.
Genlik
43
Zaman
Genlik
(a)
Çerçeve
(b)
Şekil 4.3. (a) Solunum sesi düşük akış hızında (b) ilgili tahmini entropiler
(
,
)
Şekil 4.3(b)’nin 615 ve 650 çerçeveleri arasındaki bölge ayrıntılı incelemek amacıyla
büyültülerek Şekil 4.4(a) verilmiştir. Bu şekilde elde edilen gözlemler şunlardır
ve
birbirine çok yakın (örneğin, 635 çerçeve gibi) ve aynı zamanda birbirinden
uzak olabilirler (örneğin, 631th çerçeve gibi). Bu farklılığın nedenini incelemek için her
iki çerçevenin çekirdek ve Gauss tabanlı pdf tahminleri Şekil 4.4(b) ve Şekil 4.4(c)
verilmiştir. Bu şekillerden görülmektedir ki, şayet bir çerçevenin olasılık yoğunluk
fonksiyonu Gauss-benzeri bir dağılıma sahip ise, çekirdek ve Gauss-tabanlı pdf
tahminleri birbirine çok yakın ve ilgili tahmini entropiler birbirlerine benzerdir. Diğer
yandan, bir çerçevenin pdf`i Gauss-benzeri bir dağılıma sahip olmadığında, çekirdek ve
Gauss-tabanlı tahmini pdf’ler ve ilgili tahmini entropiler birbirlerinden uzak olabilirler.
Bölüm 3.1.6 de tartışılan teorik nedenlere göre, bu sonuçlar zaten beklenmektedir.
631’inci çerçevede,
ve
arasındaki fark çok küçük olmamasına rağmen,
eşik değer yaklaşık -1 nat seçildiğinde KS ve kalp olmayan sesler her iki entropi için
doğru olarak bulunabilir.
44
(a)
(b)
(c)
Şekil 4.4. (a) Tahmini entropilerin 615 ve 650 çerçeveler arasındaki aralığın yakın çekim (b) ve
(c) sırasıyla çekirdek ve Gauss tabanlı dağılımların pdf tahminleri 635 ve 631th çerçeveler için.
45
(a)
(b)
Şekil 4.5.
,
orta nefes seviyesi için
entropilerin arasındaki ilişki (a) düşük nefes seviyesi için (b)
Şekil 4.5(a) ve Şekil 4.5(b), sırasıyla veri tabanındaki tüm deneklerin
değerlerini
figürlerde,
entropi
karşı düşük ve orta solunum akış hızları için göstermektedir. Bu
ve
entropilerin arasındaki güçlü bir korelasyon ve lineer bir
ilişki açıkça görülmektedir. Pearson product-moment yaklaşımına göre korelasyon
46
katsayısı, düşük ve orta solunum akış oranları için, r = 0.99 olarak bulunmuştur. Ayrıca,
bu şeklerde teorik olarak (3.32)’de verilen
’nin üst ve alt sınır değerlerini
göstermektedir. Entropi veri noktaları (yaklaşık 40000 çerçeve) bu sınırlar arasına
düşmüştür. Teorik olarak bulgular teyit etmek için, tahmin edilen regresyon
fonksiyonları düşük ve orta solunum akış oranları Çizelge 4.1’de verilmiştir.
Çizelge 4.1.
arasındaki doğrusal ilişki
ve
Düşük
MC
H g X 1.015 H kde
X 0.22
Orta
4.4.1.b.
ve
MC
H g X 1.012 H kde
X 0.23
enropilerin korelasyon ve varyans analizi
Bu alt bölümde,
arasındaki korelasyon ve varyanslar deneysel
ve
olarak aşağıdaki gibi incelenmiştir. Şekil 4.6(a) ve Şekil 4.6(b) de verilmiş dağılım
grafikler,
ve
arasındaki ilişkiyi sırasıyla, düşük ve orta solunum akış
oranları için göstermektedir. Bu grafikleri gözlemleyerek, veri noktalarının rasgele
dağlımı ve dolayısıyla
ve
arasında oldukça zayıf bir ilişki olduğu
söylenebilir. Korelasyon katsayılarının sayısal ölçümleri, sırasıyla düşük ve orta
solunum akış oranları için, r = 0.13 ve r = 0.14 bulunmuştur. Şekil 4.7(a) ve Şekil 4.7(b)
de
,
ve
entropilerinin veri noktalarının histogramı sırasıyla,
düşük ve orta solunum veri hızları için gösterilmiştir.
47
(a)
(b)
Şekil 4.6.
,
orta nefes seviyesi için
Bu şekillerde
entropilerin arasındaki ilişki (a) düşük nefes seviyesi için (b)
ve
benzer dağılımları olduğu görülmektedir. Düşük ve
orta solunum akış oranlarında
arasındaki fark,
ve
dağılımının ortalaması hafifçe sağ taraf kaymasıdır ve bu kayma miktarı
’nin
’nin
ortalama değeri ile ilgilidir ve bu fark sırasıyla Şekil 4.7(a) ve Şekil 4.7(b)’de
gösterilmiştir. Bu kayma aynı zamanda
ve
arasındaki doğrusal ilişkinin
48
varlığını göstermektedir. Tüm verilerin düşük ve orta bölgelerinin dağılımla ilişki
sonuçlar Çizelge 4.2’de verilmiştir. Bu çizelgedeki ana gözlem,
ve
ortalamaları birbirinden biraz farklı olsa da, bunların varyansları birbirine çok yakındır.
arasındaki fark terimi
ve
Bu çizelgede, fark entropinin (
olarak Çizelge 4.2’de gösterilmiştir.
) varyansı
(yaklaşık yüz kat) görülmektedir. Çünkü
göre daha düşük olduğu
nin varyansı
göre daha
küçüktür ve bunların arasında zayıf bir ilişki vardır. Bu sebeple Bölüm 3.1.6’nin 3’üncü
gözleminde belirtilen tartışmaya göre, önerilen
benzer KS algılama
ve
performansları sağlamaktadır.
Çizelge 4.2. Tüm veriler için istatistiksel analiz sonuçları
Model
H
MC
kde
X
Hg X
MC
D
e
X
Nefes seviyesi
Ortalama
Varyansı
Düşük
-1.89
1.20
Orta
-1.73
0.92
Düşük
-1.69
1.23
Orta
-1.53
0.96
Düşük
0.21
0.009
Orta
0.19
0.009
4.4.2. Önerilen yöntem ve diğer yöntemlerin karşılaştırılması
Önceki alt bölümler çekirdek yoğunluğuna dayalı
dağılımına dayalı
entropisi ve Gauss
entropinin nasıl benzer kalp sesi algılama performansları
sağladıkları ile ilgili bazı görüşler göstermiştiler. Bu alt bölümde ortalama algılama
hataları ve hesaplama karmaşıklığı açısından,
ve
’nin performansları
birbirleri ve literatürün diğer iki yöntemi SSA [16] ve CWT [14] ile karşılaştırılmıştır.
49
SSA, KDE ve CWT yöntemlerinin belirli parametreleri orijinal çalışmalarıyla aynı
Frekans
olacak şekilde seçilmiştir.
Entropi (nat)
Frekans
(a)
Entropi (nat)
(b)
Şekil 4.7.
,
orta nefes seviyesi için.
entropilerin histogramları (a) düşük nefes seviyesi için (b)
50
Çizelge 4.3. veri tabanındaki 20 kişiden elde edilen ortalama hatalarının yüzdesini
göstermektedir. Bu çizelge önerilen GE yönteminin ortalama FNR ve FPR hataları
sırasıyla, düşük solunum akış hızı için 1.45±1.50 ve 1.65±1.70 ve orta solunum akış hızı
için 1.98±1.81 ve 2.13±1.91 olduğu görülmektedir. Bu çizelgedeki değerlere göre GE,
SSA ve KDE metotlarının ortalama hataları birbirinden farklı olmasına rağmen, bu
farkın önemsiz olduğu görülmektedir. Dolayısıyla, ortalama algılama hatası açısından,
bu üç yöntemin benzer performansa sahip olduğunu görülmektedir.
Çizelge 4.3. Önerilen metottun ve diğer metotların ortalama ve standarda sapması düşük
ve orta nefes sevilerinde
Nefes seviyesi
Düşük
Orta
Metot
FNR
FPR
CWT
2.33 ± 1.73
2.85 ± 1.85
KDE
1.48 ± 1.54
1.68 ± 1.75
SSA
1.50 ± 1.52
1.72 ± 1.68
GE
1.45 ± 1.50
1.65 ± 1.70
CWT
4.72 ± 2.11
5.53 ± 2.18
KDE
2.01 ± 1.83
2.17 ± 1.92
SSE
1.96 ± 1.83
2.20 ± 1.87
GE
1.98 ± 1.81
2.13 ± 1.91
Ayrıca, CWT yöntemi tüm yöntemler arasında en yüksek lokalizasyon hatasını sahiptir.
SSA ve KDE arasındaki karşılaştırma benzer şekilde bir önceki çalışmada da
gösterilmiştir [15]. Bu çalışmada, düşük solunum akış hızında KDE ve SSA benzer
sonuç verdiği ve orta solunum akış hızında SSA’nin biraz daha iyi sonuçları verdiği
bulunmuştur. Ayrıca, CWT’nin KDE ve SSA göre daha büyük hata oranlarına sahip
olduğunu göstermiştiler. Çizelge 4.4’de hesaplama karmaşıklığı açısından önerilen
yöntemin ve diğer yöntemlerin 20s lik bir veriyi işlemede geçen süreleri göstermektedir.
51
Çizelge 4.4. Önerilen metodun ve diğer metotların geçen süre ve normalize geçen süre
sonuçları
Metot
Geçen süre
Normaliz geçen süre
CWT
0.12 ± 0.05
0.006
KDE
4.21 ± 0.79
0.260
SSA
1.32 ± 0.21
0.066
GE
0.05 ± 0.01
0.003
Bu çizelgeden, KDE ve SSA ortalama yüzde hataları benzer olmasına rağmen, KDE
için hesaplama maliyeti SSA göre önemli ölçüde daha yüksek olduğu görülmektedir.
KDE’nin ana hesaplama maliyeti, çekirdek yoğunluk tahmin yöntemine dayalı pdf
kestiriminden kaynaklanıyor. Ayrıca, SSA’nin GE göre oldukça yüksek hesaplama
maliyeti vardır. Sonuç olarak, GE metodu KDE ve SSA yöntemlerine göre oldukça
düşük bir hesaplama maliyetine sahiptir. [15]’de bildirildiği gibi, nispeten büyük yanlış
negatif hata vermesine rağmen, CWT tüm yöntemler arasında en düşük hesaplama
maliyeti vermektedir. Önerilen yöntemin ortalama 20 s lik veriyi ortalam hesaplama
süresi 0.05 s dir ve bu süre diğer yöntemlere göre önemli ölçüde daha düşüktür. Ayrıca,
hesaplama yükü açısından en iyi ikinci yöntem CWT dir ve 20 s veri parçası için geçen
zaman 0.12 s hesaplanmaktadır. Şekil 4.8 de ortalama FNR, FPR hatası ve geçen zaman
açısından
önerilen
yöntemi
diğer
uygulanan
yöntemlerle
karşılaştırılması
sunulmaktadır. Sonuçlar veri tabanındaki 20 kişi için verilmiştir. Şekil 4.8 den aşağıdaki
iki temel sonuç elde edilmektedir. İlk olarak, önerilen yöntemin FNR ve FPR açısından
CWT ye göre önemli ölçüde iyi performans sağlamakta ve önerilen yöntem KDE, SSA
ile benzer bir performans sağlamaktadır. İkincisi, önerilen yöntemin ortalama
hesaplama süresi diğer yöntemlere göre önemli ölçüde düşüktür.
52
Şekil 4.8. Önerilen ve diğer yöntemlerin FNR, FPR ve geçen süresi açısından
karşılaştırılması
4.5. Zamansal Bulanık C-Ortalamalar Yönteminin Deneysel Sonuçları ve
Tartışması
Bu bölüm deneysel sonuçların daha iyi değerlendirmesi ve karşılaştırması için iki alt
bölümlere ayrılmıştır: özellikleri ve yöntemleri karşılaştırma. Birinci alt bölümde, KS
lokalizasyonun performansı önerilen TFCM yöntemiyle logaritmik enerji, Shannon
entropi ve bunların düzeltilmiş sürümleri kullanılarak birbiriyle karşılaştırılmıştır. Bir
sonraki alt bölümde ise, önerilen yöntemlerin performansını doğrulamak ve
karşılaştırmak amacıyla, literatürde verilen QPM [22] ve SSA [15] yöntemleri bu
çalışmada uygulanmıştır. SSA ve QPM yöntemlerinin belirli parametreleri orijinal
çalışmalarında belirtildiği gibi seçilmiştir. Literatürde yer alan iki yöntemin
lokalizasyon performansı ayrıntılı olarak önerilen FCM ve TFCM yöntemleri ile
karşılaştırılmıştır.
4.5.1. Özellik karşılaştırması sonuçları
Şekil 4.9(a) ve Şekil 4.9(b) tüm hesaplanan özellikler için sırasıyla düşük ve orta
solunum akış hızlarında DET eğrilerini göstermektedir. Bu şekillere göre elde edilen ilk
53
sonuç, Shannon entropiye ait DET eğrisi sonuçları logaritmik enerjiye ait DET
eğrilerinden daha yüksek olmasıdır. İkincisi ise, düzgünleştirmiş özelliklerin (Shannon
entropi ya logaritmik enerji) DET eğrisi sonuçları düzgünleştirilmiş olmayan
özelliklerin DET eğrisi sonuçlarına göre önemli ölçüde düşük olmalarıdır. Bu DET
grafiklerinin kantitatif NAUC değerleri, sırasıyla düşük ve orta solunum akış hızındaki
Shannon
entropi,
düzgünleştirilmiş
logaritmik
enerji,
logaritmik enerji
düzgünleştirilmiş
için
Çizelge
Shannon
entropi
ve
4.5’de gösterilmektedir. Bu
çizelgelerden görüldüğü gibi, düşük ve orta solunum akış hızındaki düzeltilmiş
logaritmik enerji sırasıyla 0.0145 ve 0.0269 olarak en düşük NAUC değerlerine sahiptir.
Oysa düşük ve orta solunum akış hızındaki düzgünleştirmemiş Shannon entropi
sırasıyla 0.0675 ve 0.0782 değerleriyle en yüksek NAUC değerlerine sahiptir. Şekil
4.10’de solunum ses sinyalinin bir parçası logaritmik enerji özelliği ve düzeltilmiş
logaritmik enerji özelliği için gerçek KS sınırları ile birlikte gösterilmektedir. Bu
şekilde, düzgünleştirme işleminin nasıl kalp sesi lokalizasyonunun performansını
artırdığını göstermek için önemlidir. Daha iyi anlaşılması için, lokalizasyon işleminde
kullanılan basit eşikleme yöntemi ile kullanılır [21]. Bu şekillere göre, ayrıca logaritmik
enerji özelliğini düzgünleştirme olan düzgünleştirme olmayanlardan daha düşük FN ve
FP hata değerleri verdiğini gözlemleyebilirsiniz.
54
(a)
(b)
Şekil 4.9. TFCM tabanlı özellik karşılaştırması sonuçları
55
Şekil 4.10. (a) Solunum sesinin bir parçası düşük nefes sevisinde (b) ilgili parçanın logaritmik
enerji özeliği (c) logaritmik enerji özeliğine dayalı KS lokalizasyon sonuçları (d) düzetilmiş
logaritmik enerji özeliğine dayalı KS lokalizasyon sonuçları
56
Çizelge 4.5. Tüm özeliklerin NAUC değerleri TFCM algoritması için
Düşük
0.0675
Logaritmik
Enerji
0.0475
Orta
0.0782
0.0590
Entropi
Düzetilmiş
Entropi
0.0160
Düzetilmiş
Logaritmik enerji
0.0145
0.0290
0.0269
4.5.2. Yöntem karşılaştırması sonuçları
Önceki alt bölümlerde, logaritmik enerji ve Shannon entropi değerleri önerilen TFCM
yöntemiyle karşılaştırılmıştı. Bu alt bölümde ise amacımız, önerilen FCM ve TFCM
yöntemlerinin
performanslarını
literatürdeki
QPM
ve
SSA
yöntemleri
ile
karşılaştırmaktır. Önceki alt bölümlerde gösterildiği gibi, düzeltilmiş logaritmik enerji
özelliği TFCM yöntemi ile düşük ve orta solunum akış hızında diğer özelliklere göre
daha iyi sonuçlar verir. Bu nedenle FCM ve TFCM yöntemlerinin performansını bu
özelliği kullanarak QPM ve SSA yöntemleriyle karşılaştırmaya karar verilmiştir.
Şekil 4.11(a) ve Şekil 4.11(b)’de sırasıyla düşük ve orta solunum akış hızlarında ki
önerilen yöntemlerle (TFCM, FCM) QPM ve SSA yöntemleri için DET grafiklerine
dayalı genel performansları görülmektedir. Önerilen TFCM yönteminin DET değerleri
sonuçları diğer yöntemlerin DET değerlerinden oldukça düşüktür. SSA yönteminin ise
en yüksek DET eğrisi değerleri vardır. Diğer yöntemlerin (QPM ve FCM) DET eğrileri
bu iki eğri arasında kalır. Şekil 4.11(b)’de orta solunum akış hızı göz önüne alındığında,
orta akış hızında hatalar düşük akış hızına göre beklenildiği gibi daha yüksek olur. Buna
ek olarak, düşük solunum akış oranı ile elde edilen sonuçlara paralel olarak TFCM
yöntemi, orta solunum akış oranında da diğer yöntemlere göre daha iyi performans
gösterdiği görülmektedir.
57
(a)
(b)
Şekil 4.11. TFCM, QPM, FCM ve SSA yöntemlerin sonuçları (a) düşük (b) orta nefes
seviyelerinde
Kantitatif sonuçları karşılaştırmak amacıyla, DET grafiklerinin NAUC değerleri her
yöntem için hesaplanır. Çizelge 4.6’da sonuçlar gösterilmiştir. Bu çizelgeden da
görüldüğü gibi, TFCM yöntemi, sırayla düşük ve orta solunum akış oranları için 0.0145
ve 0.0269 arasında düşük NAUC değerlerine sahiptir. Bu çizelgeye göre SSA yöntemi
ise düşük ve orta akış oranları için en yüksek (0.0166 ve 0.0300) NAUC değerlerine
58
sahiptir. Kalan SSA ve FCM yöntemlerin performansı düşük ve orta solunum akış
oranları için NAUC değerlerine göre sırasıyla verilmiştir. SSA ve QPM yöntemleri için
performans değerleri sonuçları [8, 36]’da verilen sonuçlara benzerdir.
Şekil 3.11(a) ve Şekil 3.11(b), deki sonuçlar ve Çizelge 4.6’da verilen NAUC değerleri,
FPR değerlerine karşı FNR değerlerine çeşitli eşik değerleri için dikkate alınarak
verilmiştir. Aynı zamanda belirli bir FPR değer için FNR değerlerini incelemek
öğreticidir. Bu amaçla, sırası ile, düşük ve orta solunum akış oranı için FPR=%1.7
örnek bir nokta olarak seçilmiştir. Önerilen TFCM algoritmanın FNR değeri seçilen
FPR değerine göre arzu edilen bölgededir. Her yöntemin hesaplama karmaşıklığı
incelemek için, biz 20 s süreli solunum verisi için her yöntemin kalp seslerini bulmak
için harcadıkları süreyi hesapladık. Çizelge 4.9’da her yöntemin için ortalama geçen
süre ve normalize edilmiş ortalama geçen süre verilmiştir. Çizelge 4.7’de tüm yöntemler
için bu noktada FNR değerleri sırasıyla düşük ve orta solunum akışlarında
verilmektedir.
Çizelge 4.7’de görüldüğü gibi TFCM yönteminin ortalama FNR hataları sırasıyla,
düşük ve orta solunum akış hızı için 0.8±1.1 ve 1.5±1.4 dir, ve elde edilen sonuçlar bu
çalışmada en iyi sonuçlarıdır. TFCM yöntemin böyle bir performansı düşük ve orta
solunum akış hızları için bir sonraki rakibe göre (QPM yöntemi), %42 ve %25 gibi bir
iyileştirme anlamına gelir. Ayrıca, pratik uygulamalar için özel bir eşik değeri için
yöntemler genel performansı incelemek için de önemlidir. Bu amaç için, özel bir eşik
değeri olarak özelliklerin ortalaması ile standart sapmasının toplamı seçilir [8, 26, 33].
Bu eşik değeri için ortalama sonuçlar Çizelge 4.8’te verilmiştir. Bu çizelgede verilen
sonuçlara göre, önerilen TFCM yöntemi diğer yöntemlere göre düşük ve orta solunum
akış oranları için oldukça düşük FNR değerlerine sahiptir.
Çizelge 4.6. Tüm yöntemlerin NAUC değerleri düşük ve orta nefes seviyelerinde
Nefes seviye
SSA
FCM
QPM
TFCM
Düşük
0.0166
0.0163
0.0159
0.0145
Orta
0.0300
0.0294
0.0291
0.0269
59
Çizelge 4.7. Önerilen metottun ve diğer metotların ortalama ve standarda sapması düşük
ve orta nefes sevilerinde
Nefes seviyesi
Düşük
Orta
Yöntem
FNR
FPR
SSA
1.5 ± 2.0
1.7
FCM
1.5 ± 1.8
1.7
QPM
1.4 ± 1.2
1.7
TFCM
0.8 ± 1.1
1.7
SSA
2.7 ± 2.4
1.7
FCM
2.3 ± 2.0
1.7
QPM
2.0 ± 1.8
1.7
TFCM
1.5 ± 1.4
1.7
Çizelge 4.8. Önerilen metottun ve diğer metotların ortalama ve standarda sapması düşük
ve orta nefes sevilerinde
Nefes seviyesi
Düşük
Orta
Yöntem
FNR
FPR
SSA
1.8 ± 1.8
2.0 ± 1.4
QPM
1.5 ± 1.4
1.9 ± 1.1
TFCM
1.0 ± 1.2
1.7 ± 1.1
SSA
2.3 ± 2.0
2.5 ± 2.1
QPM
1.9 ± 1.7
2.1 ± 1.9
TFCM
1.5 ± 1.6
1.8 ± 1.7
Normalize geçen süre, her geçen zamanın 20 saniye bölünmesi ile hesaplanır. Bu
tablodan, FCM yönteminin diğer yöntemlere göre daha düşük hesaplama maliyeti
olduğunu belirtmek mümkündür. Ayrıca, hesaplama karmaşıklığı açısından TFCM
yöntemi en iyi ikinci yöntemdir. Şekil 4.12 solunum ses sinyalinin bir bölümünün
sırasıyla, TFCM, QPM ve SSA yöntemleri sonuçları ile gerçek KS sınırlarıyla birlikte
gösterir.
60
Çizelge 4.9. Önerilen metottun ve diğer metotların geçen sure ve normaliz gecen süre
sonuçları
Nefes seviye
SSA
FCM
QPM
TFCM
Düşük
1.3 ± 0.2
0.11 ± 0.03
0.25 ± 0.07
0.2 ± 0.05
Orta
0.06
0.006
0.012
0.010
Şekil 4.12. (a) Solunum ses sinyalinin bir bölümü ve (b)-(e) sırasıyla, TFCM, QPM ve
SSA yöntemleri sonuçları gerçek KS sınırları ile birlikte.
61
4.6. Olabilirlik Oranı Testi (LRT) ile Birlikte Maksimum a Posterior Adaptasyon
Yöntemi ile Elde Edilen Deneysel Sonuçlar ve Tartışma
Bu bölümde olabilirlik oranı testi ile yapmış olduğumuz deneysel sonuçlar
sunulmaktadır. Sonuçların daha iyi değerlendirilmesi için bu bölüm üç kısma ayrılmıştı:
öznitelik boyutunun seçimi, adaptasyon işlemi ve yöntemlerin karşılaştırılması.
4.6.1. Öznitelik boyutunun belirlenmesi ile ilgili deneysel sonuçlar
Şekil 4.13(a) ve Şekil 4.13(b)’de sırasıyla, düşük ve orta solunum akış hızlarında farklı
öznitelik guruplarına göre önerilen LRT yönteminin DET grafikleri gösterilmiştir.
Çizelge 4.10, Şekil 4.13(a) ve Şekil 4.13(b) de farklı m ((3.48)’ de tanımlı) değerleri
için verilen DET grafiklerinin NAUC değerlerini göstermektedir. Bu şekiller
incelendiğinde, kalp sesi tespiti amacıyla çoklu gözlemler için en iyi m değerinin iki
( m 2 ) olduğu ve onun NAUC değeri diğer m değerlerine göre oldukça düşük bir
değere sahip olduğu görülmektedir. Düşük ve orta hızlı solunum akışları için en düşük
NAUC değerleri 0.0119 ve 0.0189 olarak ölçülmüştür. Bu şekillerden görüldüğü
kadarıyla, tek boyutlu öznitelikler yerine ( m 0 ), çok boyutlu özniteliklerin (özellikle
1 m 4 ) kullanılması önerilen yöntemin performansını iyileştirmektedir. Çünkü çoklu
öznitelik kullanılması karar mekanizmasına zamansal bilgi ekleler ve bu ekstra bilgi
sistemin performansını artırır..
62
(a)
(b)
Şekil 4.13. LRT yönteminin farklı m değerleri için DET sonuçları (a) düşük (b) orta
nefes seviyelerinde
Çizelge 4.10. Tüm M değerleri için NAUC değerleri düşük ve orta nefes seviyelerinde.
Nefes seviye
M=0
M=1
M=2
M=3
Düşük
0.0329
0.0151
0.0119
0.0155
M=4
0.0184
Orta
0.0550
0.0277
0.0189
0.0269
0.0306
63
4.6.2. GKM parametrelerinin adaptasyonu ile elde edilen deneysel sonuçlar
Önceki bölümde, m 2 değeri en iyi sonuç verdiği için çalışmanın geri kalan
bölümünde bu değer kullanılmıştır. Bu alt bölümde SI model parametrelerinin
adaptasyonunun KS tespitindeki faydaları incelenmektedir. Öncelikle veri tabanında
bulunan bir kişi için GKM adaptasyon aşamasına ait örnek sonuçlar incelenecektir.
Şekil 4.14(a) ve Şekil 4.14(b), adaptasyon işleminin farklı miktarlarda adaptasyon
verileri için SA-GKM, SI ve SD-GKM modellerini nasıl değiştiğini göstermektedir. Bu
şekillerden, adaptasyon sırasında kullanılan verilerin süresinin 2s den 20 s’ye artırılması
SI
model
parametrelerini
iyileştirdiği
ve
SD
modeline
daha
yaklaştırdığı
gözlenmektedir. Ayrıca 8 s ve 8 s’den fazla kullanılan adaptasyon verileri arasındaki
adaptasyon farkı çok önemli olmadığı gözlenmiştir. Şekil 4.15(a) ve Şekil 4.15(b) ise
LRT modellerinin adaptasyonu esnasında elde edilen DET eğrileri sırasıyla düşük ve
orta solunum akış hızları için gösterilmiştir.
64
(a)
(b)
Şekil 4.14. GKM adaptasyon sonuçları çeşitli süre uyarlama verileri için (a) düşük (b)
orta nefes seviyelerinde
65
(a)
(b)
Şekil 4.15. ALRT ve LRT yöntemlerin DET sonuçları (a) düşük (b) orta nefes
seviyelerinde
Bu şekillerde verilen sonuçlar adaptasyon işleminin düşük ve orta akış hızlı solunum
seslerinde kalp sesi tespit performansını iyileştirdiğini göstermektedir.
66
Çizelge 4.11. LRT ve ALRT için NAUC ve önemlilik test değerleri düşük ve orta nefes
seviyelerinde
Nefes seviye
LRT
ALRT
Z0
Düşük
0.0119
0.0091
3.69
Orta
0.0189
0.0168
3.13
Bu bölümün devamında, 20 s’lik adaptasyon verisi kullanılan ALRT, ALRT yöntemi
olarak tanımlanmıştır. Çizelge 4.11 sayısal olarak LRT ve ALRT ye bağlı NAUC
değerlerini sunmaktadır. Önerilen adaptasyon işlemi, LRT ile bulunan NAUC değerini,
düşük ve orta solunum akış hızları için yaklaşık olarak %23 (0.0119-0.0091) ve %11
(0.0189-.0168) oranında azaltmıştır. Şekil 4.15(a) ve Şekil 4.15(b)’de sırasıyla kalp sesi
olmayan (non-KS) ve KS olan kısımlar için, her GKM için karışım sayısı 4 ve 5
seçilmiştir. Kalp sesi ve kalp sesi olmayan yerlerin karışım bileşenlerinin en iyi değerini
bulmak için çok sayıda deney yapılmış ve deneme yanılma yoluyla en iyi sonuçlar elde
edilmiştir. Şekil 4.16’de bu deneysel çalışmaların sonuçları gösterilmektedir. Bu
şekilden, KS için karışım sayısı
M1 5 ve KS olmayan yerler için M0 4 olarak
seçildiği zaman diğer karışım sayılarına göre daha iyi sonuçların elde edildiği
görülmüştür. Ayrıca kalp sesinin olduğu yerler için seçilen karışım sayısının KS
olmayan kısımlar için seçilen değerden daha büyük olması gerektiği gözlenmiştir.
67
Şekil 4.16. Karışım bileşenlerinin çeşitli sayıda NAUC değerleri düşük ve orta nefes
seviyelerinde
Şekil 4.17. ALRT yöntemine göre iterasyon sonuçları
68
Karışım sayısına ek olarak, önerilen yöntemin performansını etkileyen iki önemli
parametre daha vardır. Bu parametreler Çizelge 3.3 de verilen adım-4 ve adım-9
arasında kullanılan tekrarlama (iterasyon) sayısı ve denklem (3.63)’de kullanılan r
uygunluk faktördür. Bu parametrelerin yöntem üzerine etkilerini incelemek için çok
sayıda deneysel çalışma yapılmıştır. Şekil 4.17’da düşük solunum akış hızında
uygunluk parametresine karşı çeşitli iterasyon sayılarına göre önerilen yöntemin
performansı gösterilmiştir. Bu şekilden elde edilen sonuçların benzer olduğu görülse de
en iyi sonuç uygunluk faktörünün on beş ve iterasyon sayısının iki seçilmesi ile elde
edilmiştir Bu yüzden sırasıyla tekrarlama ve uygunluk parametreleri bundan sonraki
sonuçlarda 2 ve 15 olarak seçilmiştir.
Adaptasyon işleminin veri tabanındaki her bir kişi için elde edilen performansı nasıl
iyileştirdiği Şekil 4.18’de görülmektedir. Ayrıca adaptasyon işleminin istatiksel olarak
anlamlı bir iyileştirmeye sebep olup olmadığını incelemek için istatistiksel anlamlılık
testi yaptık. Bu testten elde edilen sonuçlar Çizelge 4.11’de verilmektedir. Z 0 skorları
düşük ve orta akış hızları için 3.69 ve 3.13 olarak bulunmuştur. Bu sonuçlara göre,
adaptasyondan elde edilen gelişmeler istatistik olarak da anlamlıdır (p < 0.01).
Şekil 4.18. LRT ve ALRT yöntemlerin NAUC sonuçları tüm veri tabanı için
69
4.6.3. Önerilen yöntemin literatürdeki yöntemler ile karşılaştırılması
Bu bölümde amacımız ALRT yöntemi ile KS tespit işleminin performansını
değerlendirmek ve bu yöntemi literatürde iyi bilinen iki yöntem QPM [7] ve SSA [9] ile
karşılaştırmaktır. Önerilen ve diğer yöntemlerin DET eğrileri düşük ve orta solunum
akış hızları için Şekil 4.19(a) ve Şekil 4.19(b) de gösterilmektedir. Bu şekillerden
anlaşılacağı üzere ALRT yöntemi ile bulunan DET değerleri diğer iki yönteme göre
daha düşüktür. Her bir yöntemin veri tabanındaki her kişi için NAUC değerleri Çizelge
4.12 de sunulmaktadır.
Çizelge 4.12. SSA, QPM ve ALRT için düşük ve orta nefes seviyelerinde NAUC ve
önemlilik test değerleri
Nefes seviye
SSA
QPM
Düşük
0.0166
Orta
0.0300
0.0159
ALRT
0.0091
Z0(ALRT&QPM)
4.77
0.0291
0.0168
5.63
Bu çizelgedeki değerlerden görüldüğü üzere, adaptasyonlu ALRT yöntemi düşük ve
orta solunum akış hızları için en düşük 0.0091 ve 0.0168 değerine sahiptir. Oysa QPM
yöntemi ile bu değerlerin 0.0159 ve 0.0291 olduğu görülmüştür. Önceki çalışmalarda da
[7], QPM için performans değerlerinin SSA yöntemine göre daha iyi olduğu
belirtilmiştir. Ayrıca Şekil 4.20’de bütün kişilere ait veri tabanı için önerilen ve diğer
yöntemler için NAUC değerleri verilmiştir. Bu şekil her kişi için yöntemler arasında en
düşük NAUC değerleri ALRT yönteminin sahip olduğunu göstermektedir. Çizelge
4.12’te orta ve düşük akış hızları için istatiksel olarak ALRT ile yapılan çalışmalarda en
iyi sonuçlar elde edildiği ifade edilmektedir. Şekil 4.19(a) ve Şekil 4.19(b) ile sonuçlar
çeşitli eşik değerleri için FPR’ye karşılık FNR değerlerine bağlı olarak ifade edilmiştir.
70
(a)
(b)
Şekil 4.19. ALRT, QPM, ve SSA yöntemlerin DET sonuçları (a) düşük (b) orta nefes
seviyelerinde
Bu şekil özel bir FPR değerine karşılık gelen FNR değerini incelemek için oldukça
öğreticidir. Bu amaçla, örnek bir nokta için FPR =%1.7 seçtik. Bütün yöntemlere göre
bu noktalardaki FNR değerleri Çizelge 4.13’te sunulmuştur. Dikkat edileceği üzere
ALRT yöntemi ile en düşük FNR değerleri elde edilmiştir.
71
Şekil 4.20. Bütün yöntemlerin NAUC sonuçları tüm veri tabanı için
Şekil 4.21’de KS sınırlarıyla beraber veri tabanında bulunan bir solunum sesinin 5 s lik
kısmı görülmektedir. Bu şekil ayrıca ALRT, QPM, SSA yöntemlerine göre elde edilen
KS sonuçları da görülmektedir. Bu şekilde de önerilen ALRT algoritmasının QPM ve
SSA yöntemlerinden daha iyi sonuçlar verdiği görülmektedir.
Çizelge 4.13. Önerilen metottun ve diğer metotların ortalama ve standarda sapması
düşük ve orta nefes sevilerinde
Nefes seviyesi
Düşük
Orta
Metot
FNR
FPR
SSA
1.5 ± 2.0
1.7
QPM
1.4 ± 1.2
1.7
LRT
0.9 ± 1.1
1.7
ALRT
0.6 ± 1.0
1.7
SSA
2.7 ± 2.4
1.7
QPM
2.0 ± 1.8
1.7
LRT
1.5 ± 1.8
1.7
ALRT
1.0 ± 1.5
1.7
72
Şekil 4.21. (a) Solunum ses sinyalinin bir bölümü ve (b)-(e) sırasıyla, ALRT, QPM ve SSA
yöntemleri sonuçları gerçek KS sınırları ile birlikte
73
5. SONUÇ
Bu tez de literatürdeki yöntemleri göz önüne alarak üç farklı yöntem öneriliştir. İlk
bölümde, solunum sesleri içinden kalp seslerinin hızlı ve doğru olarak algılaması için
yeni bir öznitelik önerilmiştir. Önerilen bu öznitelik tahmini bir entropidir ve aynı
zamanda çekirdek tabanlı entropi tahmini için bir üst sınırdır. Önerilen bu tahmini
entropinin, verilerin Gauss dağılıma sahip olduğu varsayımıyla hesaplanan entropi ile
aynı algılama performansına sahip olduğu gösterilmiştir. Önerilen ve çekirdek tabanlı
kalp sesi algılama yöntemlerin hesaplama karmaşıklığı hem analitik hem de sayısal
olarak karşılaştırılmıştır. Önerilen yöntemin, çekirdek tabanlı yönteme göre önemli
ölçüde daha düşük hesaplama karmaşıklığı sahip olduğu gösterilmiştir. Buna ek olarak,
önerilen ve çekirdek tabanlı yöntemin hangi şartları altında benzer algılama performansı
sağlayacağı tespit edilmiştir. Ayrıca önerilen ve çekirdek tabanlı entropi arasında güçlü
bir doğrusal ilişki olduğunu hem analitik hem de deneysel olarak gösterilmiştir ve
çekirdek tabanlı entropi yerine önerilen entropi kullanılarak benzer algılama
performansları elde edilebileceği gösterilmiştir. İlk bölümde önerilen yöntemin
performansı gerçek solunum sesleri içeren bir veri tabanı kullanılarak literatürdeki üç
yöntem ile karşılaştırılmıştır. Deneysel sonuçlar göre, önerilen yöntemi diğer tüm
yöntemlere karşılaştırıldığında önemli ölçüde daha düşük hesaplama karmaşıklığı
olduğu gösterilmiştir. Önerilen yöntemin ortalama hatası CWT göre daha düşük, KDE
ve SSA ile benzer olduğu gösterilmiştir. Elde edilen bu sonuçlara göre, önerilen entropi
çeşitli uygulamalarda çekirdek tabanlı entropi yerine kullanılabilir.
Bu tezin ikinci bölümünde, solunum seslerinin içinde kalp sesinin yerini tespit etmek
FCM algoritmasına dayalı yeni bir algoritma önerilmiş ve bu algoritmaya zamansal
bulanık c-ortalamalar (TFCM) algoritması ismi verilmiştir. Bu algoritmanın FCM
algoritmasından en önemli farkı karar mekanizmasının çalışma şeklidir. Karar
mekanizmasında FCM algoritması sadece yerel bilgiler kullanırken, TFCM algoritması
yerel ve zamansal bilgileri beraber kullanır. Önerilen bu algoritma kalp seslerinin yerini
bulma görevinde FCM ve literatürdeki birçok algoritmalarla karşılaştırılmış ve bu
algoritmalardan daha başarılı sonuçlar elde ettiği gösterilmiştir.
74
Bu tezin üçüncü bölümünde kalp seslerinin yerlerini bulma işleminin etiketlendirilmiş
eğitim verisi kullanılarak nasıl daha iyileştirilebileceği anlatılmıştır. Önerilen yöntem
olabilirlik oranı testi (LRT) ve etkili bir adaptation işlemine dayanmaktadır. Deneysel
sonuçlar şunları göstermiştir; adaptasyon işlemi düşük ve orta solunum akış hızlarında
sistemin performansını iyileştirmiştir.
75
KAYNAKLAR
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
S. Sanei, M. Ghodsi, and H. Hassani, 2011. An adaptive singular spectrum analysis
approach to murmur detection from heart sounds. Medical Engineering & Physics.
33(3), 362-367.
M. El-Segaier, O. Lilja, S. Lukkarinen, L. Sornmo, R. Sepponen, and E. Pesonen, 2005.
Computer-based detection and analysis of heart sound and murmur. Annals of
Biomedical Engineering. 33(7), 937-942.
F. Beritelli and S. Serrano, 2007. Biometric identification based on frequency analysis
of cardiac sounds. IEEE Transactions on Information Forensics and Security. 2(3),
596-604.
K. Phua, J. Chen, T. H. Dat, and L. Shue, 2008. Heart sound as a biometric. Pattern
Recognition. 41(3), 906-919.
R. Palaniappan, K. Sundaraj, and N. U. Ahamed, 2013. Machine learning in lung sound
analysis: A systematic review. Biocybernetics and Biomedical Engineering. 33(5), 129135.
C. Ahlstrom, O. Liljefeldt, P. Hult, and P. Ask, 2005. Heart sound cancellation from
lung sound recordings using recurrence time statistics and nonlinear prediction. IEEE
Signal Processing Letters. 12(12), 812-815.
V. K. Iyer, P. A. Ramamoorthy, F. Hong, and Y. Ploysongsang, 1986. Reduction of
Heart Sounds from Lung Sounds by Adaptive Filtering. IEEE Transactions on
Biomedical Engineering. 33(12), 1141-1148.
M. Kompis and E. Russi, 1992. Adaptive Heart-Noise Reduction of Lung Sounds
Recorded by a Single Microphone. Proceedings of the Annual International Conference
of the IEEE Engineering in Medicine and Biology Society. Vol 14, pp. 691-692.
H. Zheng, H. Wang, L. Y. Wang, and G. G. Yin, 2007. Cyclic system reconfiguration
and time-split signal separation with applications to lung sound pattern analysis. IEEE
Transactions on Signal Processing. 55(6), 2897-2913.
A. Yadollahi and Z. Moussavi, 2011. The Relationship between Tracheal Respiratory
Sounds and Flow in Osa Patients during Sleep. Proceedings of the 33th Annual
International Conference of the IEEE Engineering in Medicine and Biology Society
(Embc), 6797 - 6800.
A. Yadollahi and Z. A. K. Moussavi, 2006. A robust method for estimating respiratory
flow using tracheal sounds entropy. IEEE Transactions on Biomedical Engineering.
53(4), 662-668.
C. T. Chao, N. Maneetien, C. J. Wang, and J. S. Chiou, 2014. Performance Evaluation
of Heart Sound Cancellation in FPGA Hardware Implementation for Electronic
Stethoscope. Scientific World Journal.
J. I. Shin, S. L. Yi, D. H. Jo, J. H. Bae, and T. S. Leei, 2013. Development of
smartphone-based stethoscope system. Proceedings of the 13th International
Conference on Control, Automation and Systems, pp. 1288-1291.
F. Belloni, D. Della Gıustına, M. Rıva, and M. Malcangi , 2010. A new digital
stethoscope with environmental noise cancellation. Proceedings of the 12th WSEAS
International Conference on Mathematical and Computational Methods in Science and
Engineering. pp. 169-174.
F. Ghaderi, H. R. Mohseni, and S. Sanei, 2011. Localizing Heart Sounds in Respiratory
Signals Using Singular Spectrum Analysis. IEEE Transactions on Biomedical
Engineering. 58(12), 3360-3367.
76
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]
[29]
[30]
[31]
[32]
[33]
Gnitecki J., and M. Z. Mossavi, 2003. Variance fractal dimension trajectory as a tool for
hear sound localization in lung sounds recordings. Proceedings of the 25th Annual
International Conference of the IEEE Engineering in Medicine and Biology Society. pp.
2420-2423.
F. Jin and F. Sattar, 2013. A Multiscale Mean Shift Localization Approach for Robust
Extraction of Heart Sounds in Respiratory Signals. Proceedings of the IEEE
International Conference on Acoustics, Speech and Signal Processing. pp. 1291-1295.
M. T. Pourazad, Z. Moussavi, and G. Thomas, 2006. Heart sound cancellation from
lung sound recordings using time-frequency filtering. Medical & Biological
Engineering & Computing. 44(3), 216-225.
H. Shamsi and I. Y. Ozbek, 2012. Heart Sound Localization in Chest Sound Using
Temporal Fuzzy C-Means Classification. Proceedings of the 34th Annual International
Conference of the IEEE Engineering in Medicine and Biology Society (Embc), pp.
5286-5289.
H. Shamsi and I. Y. Ozbek, 2014. Robust heart sound detection in respiratory sound
using LRT with maximum a posteriori based online parameter adaptation. Medical
Engineering & Physics. 36(10), 1277-1287.
A. Yadollahi and Z. M. K. Moussavi, 2006. A robust method for heart sounds
localization using lung sounds entropy. IEEE Transactions on Biomedical Engineering.
53(3), 497-502.
M. Zivanovic, and M. Gonzalez-lazal, 2013. Quasi-periodic modeling for heart sound
localization and suppressionin lung sound. Biomed Signal Proces. 8(6), 586-595.
H. Shamsi and I. Y. Ozbek, 2013. Heart Sound Detection in Respiratory Sound Using
Hidden Markov Model. Proceedings of the 21st European Signal Processing
Conference (Eusipco), pp. 1-5.
C. E. Shannon, 1948. mathematical theory of communication. Bell System Technical
Journal, vol. 27, pp. 379-423.
B. W. Silverman, 1986. Density Estimation for Statistics and Data Analysis: Chapman
and Hall/CRC.
H. Shamsi and I. Y. Ozbek, 2015. A robust method for online heart sound localization
in respiratory sound based on temporal fuzzy c-means. Medical & biological
engineering & computing, 53(1), 45-56.
H. Liang, S. Lukkarinen, and I. Hartimo, 1997. Heart sound segmentation algorithm
based on heart sound envelogram. Computers in Cardiology. 24, pp. 105-108.
I. A. Ahmad, and P. Lin, 1976. Nonparametric estimation of the entropy for absolutely
continuous distributions. IEEE Trans on Inform Theory. 22(3), 372-375.
M. Thomas, J. A Thomas, 1991. Eements of Information Theory. : Wiley-Interscience.
J. R. Hershey and P. A. Olsen, 2007. Approximating the Kullback Leibler Divergence
between Gaussian Mixture Models. Proceedings of the IEEE International Conference
on Acoustics, Speech, and Signal Processing. 1-3, pp. 317-320.
M. F. Huber, T. Bailey, H. Durrant-Whyte, and U. D. Hanebeck, 2008. On Entropy
Approximation for Gaussian Mixture Random Vectors. Proceedings of the IEEE
International Conference on Multisensor Fusion and Integration for Intelligent
Systems, 1-2, pp. 336-343.
J. Nahar, T. Imam, K. S. Tickle, and Y. P. P. Chen, 2013. Computational intelligence
for heart disease diagnosis: A medical knowledge driven approach. Expert Systems with
Applications, vol. 40(1), 96-104.
H. Naseri and M. R. Homaeinezhad, 2013. Detection and Boundary Identification of
Phonocardiogram Sounds Using an Expert Frequency-Energy Based Metric. Annals of
Biomedical Engineering, vol. 41(2), 279-292.
77
[34]
H. Uguz, A. Arslan, R. Saracoglu, and I. Turkoglu, 2008. Detection of heart valve
diseases by using fuzzy discrete hidden Markov model. Expert Systems with
Applications, vol. 34(4), 2799-2811.
[35]
S. Cortes, R. Jane, A. Torres, J. A. Fiz, and J. Morera, 2006. Detection and adaptive
cancellation of heart sound interference in tracheal sounds. Proceedings of the 28th
Annual International Conference of the IEEE Engineering in Medicine and Biology
Society. 1-15, pp. 4830-4833.
[36]
F. Jin, F. Sattar, and D. Y. T. Goh, 2009. A filter bank-based source extraction
algorithm for heart sound removal in respiratory sounds. Computers in Biology and
Medicine. 39(9), 768-777.
[37]
C. E. Shannon, 1948. A Mathematical Theory of Communication. The Bell System
Technical Journal. 27, 379–423.
[38]
J. C. Bezdek, R. Ehrlich, and W. Full, 1984. FCM - the Fuzzy C-Means ClusteringAlgorithm. Computers & Geosciences. 10(2-3), 191-203.
[39] C. C. Hung, S. Kulkarni, and B. C. Kuo, 2011. A New Weighted Fuzzy C-Means
Clustering Algorithm for Remotely Sensed Image Classification. IEEE Journal of
Selected Topics in Signal Processing. 5(3), 543-553.
[40]
H. Tang, T. Li, Y. Park, and T. S. Qiu, 2010. Separation of Heart Sound Signal from
Noise in Joint Cycle Frequency-Time-Frequency Domains Based on Fuzzy Detection,"
IEEE Transactions on Biomedical Engineering. 57(10), 2438-2447.
[41]
L. Zhu, F. L. Chung, and S. T. Wang, 2009. Generalized Fuzzy C-Means Clustering
Algorithm With Improved Fuzzy Partitions. IEEE Transactions on Systems Man and
Cybernetics Part B-Cybernetics. 39(3), 578-591.
[42]
K. S. Chuang, H. L. Tzeng, S. Chen, J. Wu, and T. J. Chen, 2006. Fuzzy c-means
clustering with spatial information for image segmentation. Computerized Medical
Imaging and Graphics. 30(1), 9-15.
[43]
F. Hoppner and F. Klawonn, 2003. A contribution to convergence theory of fuzzy cmeans and derivatives. IEEE Transactions on Fuzzy Systems. 11(5), 682-694.
[44]
S. R. Kannan, 2008. A new segmentation system for brain MR images based on fuzzy
techniques. Applied Soft Computing. 8(4), 1599-1606.
[45]
J. Ramirez, J. Segura, C. Benitez, L. Garcia, A. Rubio, 2005. Statistical voice activity
detec-tion using a multiple observation likelihood ratio test. IEEE Signal Process Letter
12(10), 689–92.
[46]
S. M. Kay, 1993. Fundamentals of statistical signal processing, vol. 2: detection
theory.New Jersey: Prentice-Hall Inc.
[47]
H. Jiang, L. Deng, 2001. A bayesian approach to the verification problem: applications
to speaker verification. IEEE Trans Speech Audio Process. 9(8), 874–84.
[48]
K. Phua, J. Chen, T. H. Dat, L Shue, 2008. Heart sound as a biometric. Pattern Recogn.
41(3), :906–919.
[49]
K. H. Lee, J. H. Chang, N. S. Kim, S. Kang, Y. Kim, 2010. Frequency-domain doubletalkdetection based on the Gaussian mixture model. IEEE Signal Process Letter. 17(5),
453–456.
[50]
A. P. Dempster, N. M. Laird, D. B. Rubin, 1977. Maximum likelihood from incomplete
datavia the EM algorithm. J Roy Stat Soc B Met. 39(1), 1–38.
[51] J. Neyman, E.S. Pearson, 1933. On the problem of the most efficient tests of
statisticalhypotheses. Philos Trans Roy Soc A 231, 289–337.
[52] J. L. Gauvain, C. H. Lee, 1994. Maximum a posteriori estimation for multivariate Gaussian mixture observations of Markov chains. IEEE Trans Speech Audio Process.2(2),
291–298.
ÖZGEÇMİŞ
1985 yılında İran’da dünyaya gelen Hamed SHAMSİ ilk, orta ve lise öğrenimini
İRAN’da tamamladı. 2003 yılında başladığı İSLAMİK AZAD Üniversitesi Elektronik
ve Haberleşme Mühendisliği Bölümü’nden 2007’de mezun oldu. 2007’da İSLAMİK
AZAD Üniversitesi Elektrik Elektronik Mühendisliği Haberleşme Bilim Dalında
lisansüstü eğitim için hak kazandı ve 2010 yılında mezun oldu. 2011’da Atatürk
Üniversitesi Elektrik Elektronik Mühendisliği Haberleşme Bilim Dalında doktora
eğitim için hak kazandı. Evli ve 1 çocuk babasıdır.