HPFBU2012
Hızlandırıcı Fiziği
Enine Demet Dinamiği I
Öznur METE
CERN, Accelerators Beam Transfer Group
oznur.mete@cern.ch
1
HPFBU2012
Giriş
Matrix Formalism
Hamiltonian Formalism
Lie Algebra
HPFBU2012 - Enine Demet Dinamiği I
2
Öznur Mete
HPFBU2012
Giriş
Enine dinamik
Boyuna dinamik
Öğrendiklerimizi simulasyon (Parmela, Superfish, Madx) çalışmaları ile pekiştireceğiz.
HPFBU2012 - Enine Demet Dinamiği I
3
Öznur Mete
HPFBU2012
Giriş
‣ Enine demet dinamiğinin temel kavramları (“Particle Accelerator Physics”. Helmut Wiedemann)
‣ Parçacıkların ortaklaşa etkileşmeleri (collective effects)
- Uzay yükü (CAS2009, M. Ferrario)
- Landau sönümü (CAS2009, A. Hofmann)
- Demet-demet etkileri (CAS2009, W. Herr)
- Demet soğutma (CAS2009, M. Steck)
‣ Demet yayılımı artışının kaynakları
‣ Dairesel bir hızlandırıcının MADX programı kullanılarak optik tasarımının ve düzeltmelerinin
yapılması
‣ Düşük yayınımlı hızlandırıcılar
‣ Işınlık
(CAS2009, A. Wolski)
(CAS2009, W. Herr)
‣ Hızlandırıcılar için RF temelleri
- Temel kavramlar (CAS2009, F. Caspers)
- RF kovuk tasarımı (CAS2009, E. Jenson)
‣ Geribesleme
(HPFBU2012, Ö. Çobanoğlu)
HPFBU2012 - Enine Demet Dinamiği I
4
Öznur Mete
Temel Taşlar
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Demetin enine olculeri, demetin gezigen yaricapi gore kucuk oldugu icin magnetik alani ideal gezinge
(trajectory) civarinda seriye acabiliriz.
(x − x0 ) !
(x − x0 )2 !!
f (x) = f (x0 ) +
f (x0 ) +
f (x0 ) + ...
1!
2!
Taylor Acilimi:
B magnetik alaninin Taylor acilimina bakalim:
dBy
1 d2 By 2
1 d3 By 3
By (x) = By0 +
x+
x +
x + ...
dx
2! dx2
3! dx3
y
momentuma normalize edelim, p/e
B(x)
B0
g∗x
1 eg ! 2
1 eg !! 3
=
+
+
x +
x + ...
p/e
B0 ρ
p/e
2! p/e
3! p/e
ρ
θ
B(x)
1
1
1 3
2
= + kx + mx + ox + ...
p/e
ρ
2!
3!
s
dairesel koordinat sistemi
HPFBU2012 - Enine Demet Dinamiği I
5
Öznur Mete
Temel Taşlar
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
çok-kutuplu tanım
etki
iki-kutuplu
(dipole)
dört-kutuplu
(quadrupole)
altı-kutuplu
(sextupole)
sekiz-kutuplu
(octupole)
e d3 Bz
o=
p dx3
yönlendirme
(steering)
odaklama
(focusing)
v.b.
e dBz
k=
p dx
1
e
= Bz0
ρ
p
renklilik karşılama
(chromaticity compensation)
alan hataları ve hata karşılama
(field errors and compensation)
...
...
e d2 Bz
m=
p dx2
B(x)
1
1
1 3
2
= + kx + mx + ox + ...
p/e
ρ
2!
3!
HPFBU2012 - Enine Demet Dinamiği I
6
Öznur Mete
Temel Taşlar
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Demet Bükülmezliği (rigidity)
Hızlandırıcılarda, parcaciklar onceden belirlenmis yorungelerde hareket ederler.
‣
‣
Nasil? Saptirici magnetik alanlar kullanilarak.
Ne kadar? Parcaciklarin merkezcil kuvvetleri ve Lorentz kuvveti arasindaki dengeye bagli olarak.
gnet
a
M
lu
p
u
t
u
K
i
Ik
FL = Fmerkezcil
FL = e[v × B]
mγv 2 κ + e[v × B] = 0
p
B.ρ =
q
κ = (κx , κy , 0) ‣ gezingenin yerel egrilik vektoru (yöney)
κx,y =
1
ρx,y
‣
gezingenin yerel egrilik yaricapi
HPFBU2012 - Enine Demet Dinamiği I
7
Öznur Mete
Temel Taşlar
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
t
e
n
g
a
M
u
l
Iki Kutup
CERN, PS 1959
CERN, SPS 1976
HPFBU2012 - Enine Demet Dinamiği I
8
Öznur Mete
Temel Taşlar
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Bir Iki Kutuplunun (Dipolun) Alan Kuvveti
1
e
= B
ρ
p
1
e
=
B
ρ
γmv
1
Bρ[T.m] = βE
ec
“normalize alan kuvveti”
1
ec
=
B
ρ
γmβcc
1
ec
=
B
ρ
Eβ
10
Bρ[T.m] =
βE[GeV ]
2.998
1 −1
0.2998.B0 (T )
[m ] =
ρ
p(GeV /c)
1 −1
[m ] = 0.2998βE[GeV ]
ρ
“Bir parcacigin manyetik alana dik tam bir yorunge donusu icin acisal frekansina,
cyclotron ya da Larmour frekansi denir. ”
Hatırlatıcı
p = γmv
v = βc
HPFBU2012 - Enine Demet Dinamiği I
1
ec
=
B
ρ
Eβ
ec2
ωL =|
B|
E
9
Öznur Mete
Temel Taşlar
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Bir Dort Kutuplunun (Quadrupole) Odaklama Kuvveti
Doğrusal olarak artan bir Lorentz kuvveti gerekiyor:
Bx = gy By = gx
−2
“normalize alan kuvveti”
k[m
“bir dört-kutuplunun odak uzakligi”
0.2998.g
]=
p(GeV /c)
1
f=
k · lq
Dört Kutuplu Magnet
HPFBU2012 - Enine Demet Dinamiği I
10
Öznur Mete
Temel Taşlar
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Bundan sonrası için yapacağımız yaklaşımlar:
‣
Hesapları ideal parçacığı ve tasarım yörüngesini göz önünde bulundurarak yapalım.
‣
Diğer parçacıkların demet içinde sayılması için gereken koşul:
‣
Magnetik kılavuz alan için koşul: Alanın x,y bileşenler cinsinden sadece doğrusal terimleri
x, y << ρ
göz önünde bulundurulacak.
HPFBU2012 - Enine Demet Dinamiği I
11
Öznur Mete
hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
Yarıçapsal ivmelenme
HPFBU2012
d2 ρ
dθ 2
ar = 2 − ρ( )
dt
dt
erek yörünge
ρ = constant
genel gezinge
ρ→ρ+x
dρ
=0
dt
d2
mv 2
F = m 2 (x + ρ) −
= eBy v
dt
x+ρ
{
{
dθ 2
F = mρ( ) = mρω 2
dt
F = mv 2 /ρ
d2
d2
(x + ρ) = 2 x
2
dt
dt
ρ≈m
x ≈ mm
1
1
x
≈ (1 − )
x+ρ
ρ
ρ
y
ρ
θ
s
d2 x mv 2
x
m 2 −
(1 − ) = eBy v
dt
ρ
ρ
dairesel koordinat (eşgüdüm) sistemi
HPFBU2012 - Enine Demet Dinamiği I
12
Öznur Mete
Türetim - 1
‣
∂By
By = B0 + x
∂x
doğrusal yaklaşıma göre kılavuz alan
d2 x mv 2
x
∂By
m 2 −
(1 − ) = ev(B0 + x
) :m
dt
ρ
ρ
∂x
d2 x v 2
x
evB0
evxg
− (1 − ) =
+
2
dt
ρ
ρ
m
m
‣bağımsız değişkenin değişimi: t -> s
2
dx
dx ds
d
x
d dx ds
d dx ds ds
=
= (
)=
(
)
2
dt
ds dt
dt
dt ds dt
ds ds dt dt
\
d2 x
dx dv
!! 2
=x v +
v
2
dt
ds ds
v2
x
evB0
evxg
x v − (1 − ) =
+
ρ
ρ
m
m
!! 2
1
x
eB0
exg
x − (1 − ) =
+
ρ
ρ
mv
mv
!!
1
x
B0
xg
x − + 2 =
+
ρ ρ
p/e p/e
!!
:v^2
mv=p
g/(p/e)=k
1
x + x( 2 − k) = 0
ρ
!!
Review of CAS - Accelerator Physics' 09 May/2010
13
O.Mete
hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Özetle
‣
‣
‣
doğrusal yaklaşım altında kılavuz alanı,
bağımsız değişken değişimi, parçacık momentumuna normalizasyon,
ve bazı hesaplamalar,
önceki sayfa...
d2 x mv 2
x
m 2 −
(1 − ) = eBy v
dt
ρ
ρ
1
x + x( 2 − k) = 0
ρ
!!
1
k = 0, x = − 2 x
ρ
!!
yorum: dört-kutuplu magnetler olmaksızın bile
iki-kutuplu magnetin eğme düzleminde bir geriçağırıcı kuvvet var. “Zayıf odaklama”.
HPFBU2012 - Enine Demet Dinamiği I
14
Öznur Mete
hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Özetle
‣
‣
‣
doğrusal yaklaşım altında kılavuz alanı,
bağımsız değişken değişimi, parçacık momentumuna normalizasyon,
ve bazı hesaplamalar,
önceki sayfa...
d2 x mv 2
x
m 2 −
(1 − ) = eBy v
dt
ρ
ρ
1
x + x( 2 − k) = 0
ρ
!!
Equation for the vertical motion
1
=0
2
ρ
k ↔ −k
no dipoles...in general...
quad field changes sign
y !! + ky = 0
HPFBU2012 - Enine Demet Dinamiği I
15
Öznur Mete
hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Gezinge denkleminin çözümü, matris formalizm, ince lens yaklaşımı, örgü birimleri boyunca demet iletimi...
1
x + x( 2 − k) = 0
ρ
!!
Tanım:
Yatay düzlemde:
1
K = 2 −k
ρ
Dikey Düzlemde:
K=k
x!! − Kx = 0
Harmonik salınıcının hareket denklemi!
HPFBU2012 - Enine Demet Dinamiği I
16
Öznur Mete
hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Gezinge denkleminin çözümü, matris formalizm, ince lens yaklaşımı, örgü birimleri boyunca demet iletimi...
Harmonik salınıcı denklemini genel çözümü: √
√
x!0
x(s) = x0 cos( Ks) + √ sin( Ks)
K
x (s) = −x0
!
√
M=
√
√
!
Ksin( Ks) + x0 cos( Ks)
!
"
cos |K|s
"
"
− |K|sin |K|s
s = s1
s = s0
K>0
#
"
√1 sin |K|s
|K|
"
cos |K|s
Odaklama
Bir parçacığın, S0 konumundaki (x,x’)
eşgüdüm noktalarını M matrisini kullanarak
S1 konumu için hesaplayabiliriz. Bu M
matrisine “iletim matrisi” denir.
HPFBU2012 - Enine Demet Dinamiği I
!
x
x!
17
"
s1
=M∗
!
x
x!
"
s0
Öznur Mete
hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Gezinge denkleminin çözümü, matris formalizm, ince lens yaklaşımı, örgü birimleri boyunca demet iletimi...
M=
!
"
cos |K|s
"
"
− |K|sin |K|s
"
√1 sin
|K|
|K|s
"
cos |K|s
#
K=0
Gezinge boyunca magnet yoksa…
M=
!
1
0
s
1
"
sürüklenme boşluğu için iletim matrisi
HPFBU2012 - Enine Demet Dinamiği I
18
Öznur Mete
hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Gezinge denkleminin çözümü, matris formalizm, ince lens yaklaşımı, örgü birimleri boyunca demet iletimi...
M=
!
"
cos |K|s
"
"
− |K|sin |K|s
"
√1 sin
|K|
"
cos |K|s
Dağıtma
K<0
s = s1
s = s0
!
HPFBU2012 - Enine Demet Dinamiği I
x
x!
|K|s
#
"
s1
=M∗
19
!
x
x!
"
s0
Öznur Mete
ince lens yaklaşımı
HPFBU2012
Enine Demet Dinamiğinin Temel Kavramları
Gezinge denkleminin çözümü, matris formalizm, ince lens yaklaşımı, örgü birimleri boyunca demet iletimi...
Kullanışlılık açısından aşağıdaki gibi bir durum incelenebilir:
1
f=
>> lq
klq
Genellikle bir magnetin uzunluğu odak uzunluğundan mertebece küçüktür.
lq → 0
klq = constant
HPFBU2012 - Enine Demet Dinamiği I
matrix of a
focusing quadrupole
MQF =
!
1
1
f
0
1
"
20
matrix of a
defocusing quadrupole
MQD =
!
1
− f1
0
1
"
Öznur Mete
örgü birimleri boyunca demet iletimi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Gezinge denkleminin çözümü, matris formalizm, ince lens yaklaşımı, örgü birimleri boyunca demet iletimi...
Tek örgü birimleri için ayrı ayrı bulunmuş sonuçlar, bu
birimlerin iletim matrislerinin çarpılması ile birleştirilir.
Mtotal = MQF ∗ MD ∗ MBend ∗ MD ∗ MQD ∗ MD ∗ MBend ∗ MD∗ ...
HPFBU2012 - Enine Demet Dinamiği I
21
Öznur Mete
örgü birimleri boyunca demet iletimi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Gezinge denkleminin çözümü, matris formalizm, ince lens yaklaşımı, örgü birimleri boyunca demet iletimi...
Tek örgü birimleri için ayrı ayrı bulunmuş sonuçlar, bu
birimlerin iletim matrislerinin çarpılması ile birleştirilir.
Mtotal = MQF ∗ MD ∗ MBend ∗ MD ∗ MQD ∗ MD ∗ MBend ∗ MD∗ ...
example: FoDo Lattice
half cell
=
!
MF oDo = MQF ∗ MD ∗ MQD ∗ MD ∗ MQF
1
1
2f
" !
" !
0
1
1 l
∗
∗
1
− f1
0 1
" !
" !
0
1
1 l
∗
∗
1
1
0 1
2f
0
1
"
matrix of a FODO lattice
MF oDo =
HPFBU2012 - Enine Demet Dinamiği I
!
l2
2f 2
1−
− 2fl 2 (1 +
22
l
2f )
l
2f )
2l(1 −
l2
1 − 2f 2
"
Öznur Mete
Hill Denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Periyodik odaklama koşulları altından hareket denklemi…
George William Hill (1838 - 1914) Mathematician - Astronomer
http://www-history.mcs.st-andrews.ac.uk/Biographies/Hill.html
Hill Denklemi
x!! (s) − k(s)x(s) = 0
k(s) demek, odaklama
özellikleri hızlandırıcı
boyuncaki konuma
bağlı demektir.
Genel Çözümü
√ !
x(s) = ! β(s)cos(ψ(s) + φ)
HPFBU2012 - Enine Demet Dinamiği I
23
Öznur Mete
Türetim - 2
(1)
(2)
(3)
Faz uzayı
Enine Demet Dinamiğinin Temel Kavramları
√ !
x(s) = ! β(s)cos(ψ(s) + φ)
x(s)
cos(ψ(s) + φ) = √ !
# β(s)
HPFBU2012
√
!
!
x (s) = − !
[α(s)cos(ψ(s) + φ) + sin(ψ(s) + φ)]
β(s)
βx! + xα
sin(ψ(s) + φ) = − !
√
β(s) %
2
x
(s)
2
cos (ψ(s) + φ) =
#β(s)
1 2
sin (ψ(s) + φ) =
(β (s)x!2 (s) + 2β(s)α(s)x! (s)x(s) + α2 (s)x2 (s))
#β
2
(4)
sin2 (ψ(s) + φ) + cos2 (ψ(s) + φ) = 1
(5)
! = γ(s)x(s)2 + 2α(s)x(s)x! (s) + β(s)x! (s)2
additionally:
HPFBU2012 - Enine Demet Dinamiği I
1 + α2 (s)
γ(s) =
β(s)
1 !
α(s) = − β (s)
2
24
Öznur Mete
Faz uzayının korunumu
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Demetin faz uzayındaki yayımı (emittance) korunumludur.
‣ Bir onceki sayfada gosterdigimiz gibi demetin x-x’ uzayindaki davranisi, s konumuna gore
parametrik bir elips ile tanimlanir.
! = γ(s)x2 (s) + 2α(s)x(s)x! (s) + β(s)x!2 (s)
x!
!
!/β
.
√
!
( !γ , −α "/γ )
.
.
!
HPFBU2012 - Enine Demet Dinamiği I
.
(
!
!
!β , −α "/β )
x
!/γ
25
Öznur Mete
Faz uzayının korunumu
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Demetin faz uzayındaki yayımı (emittance) korunumludur.
‣ Bir onceki sayfada gosterdigimiz gibi demetin x-x’ uzayindaki davranisi, s konumuna gore
parametrik bir elips ile tanimlanir.
! = γ(s)x2 (s) + 2α(s)x(s)x! (s) + β(s)x!2 (s)
x!
!
!/β
√
!
( !γ , −α "/γ )
.
.
.
(
!
!
!β , −α "/β )
Max. genlik
.
!
‣Buyuk
beta fonksiyonu genis bir demetin ve
dusuk acilmanin (divergence) gostergesidir.
x
Tersi de dogrudur.
!/γ
‣Dort-kutuplu magnetin ekseninin ortasinda,
β = maximum, α = 0 → x! = 0
‣
‣
x, x’ uzayında bir elipsin parametrik gösterimidir.
bu elipsin şekli ve yönelimi α,β,γ parametrelerince belirlenir.
HPFBU2012 - Enine Demet Dinamiği I
26
Öznur Mete
Faz uzayının korunumu
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
Demetin faz uzayındaki yayımı (emittance) korunumludur.
‣ Bir onceki sayfada gosterdigimiz gibi demetin x-x’ uzayindaki davranisi, s konumuna gore
parametrik bir elips ile tanimlanir.
! = γ(s)x2 (s) + 2α(s)x(s)x! (s) + β(s)x!2 (s)
x!
!
!/β
.
√
!
( !γ , −α "/γ )
to
k
cı
a
ç
ar idir.
p
an elliğ
n
a
ps l öz it!
a
k m e ab
a
S
c
te
n
ı
lan
a
’
x
x,
‣
‣
‣
.
nu
u
ğ
u
l
plu
n
.
!
.
(
!
!
Liouville Teoremi:
Faz uzayinda demet tarafindan
kaplanan alan sabittir.
1
!∝
βγ
!β , −α "/β )
Normalize yayım (emittance):
x
!/γ
!∗ = (γβ)!
x, x’ uzayında bir elipsin parametrik gösterimidir.
bu elipsin şekli ve yönelimi α,β,γ parametrelerince belirlenir.
ε, s’den bağımsız bir hareket sabitidir.
HPFBU2012 - Enine Demet Dinamiği I
27
Öznur Mete
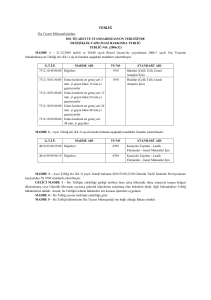
Betatron Fonksiyonu
‣Hızlandırıcı
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
boyunca magnetik örgünün odaklama özelliklerinin tanımlandığı periyodik fonksiyondur.
β(s + L) = β(s)
courtesy B. Holzer
“0” ve “s” noktaları arasındaki “faz ilerlemesi”
ψ(s) =
(phase advance)
!
s
0
1
Q=
2π
Tam bir devir için,
tur başına salınım sayısına “ayar” (tune) denir.
!
ds
β(s)
ds
β(s)
x(s) ile tanımlanan ideal yörünge civarında gerçekleşen enine salınımlara
“Betatron salınımları” denir.
Daha önce görmüş olduğumuz matris formalizmi, çok parçacıktan oluşan bir sistemin,
yani demetin, bileşke davranışı hakkında bilgi vermez.
HPFBU2012 - Enine Demet Dinamiği I
28
Öznur Mete
Betatron Ayarı
Enine Demet Dinamiğinin Temel Kavramları
“0” ve “s” noktaları arasındaki “faz ilerlemesi”
ψ(s) =
(phase advance)
!
s
0
Tam bir devir için,
1
Q=
2π
tur başına salınım sayısına “ayar” (tune) denir.
!
HPFBU2012
ds
β(s)
ds
β(s)
Betatron ayarı enine düzlemde parçacık hareketini tanımlamak için kullanılan önemli bir parametredir.
İdeal bir hızlandırıcı (ideal magnetler ve hizalama) ve tamamen monochromatic bir demet için betatron
ayar değerleri sistemdeki quadrupollerin kuvvet değerlerine uygun herhangi bir değer olabilir. Ancak
gerçekte, magnetik alanlarda ve bileşenlerin hizalanmasında ufak hatalar oluşması kaçınılmazdır. Bu tür
kusurlardan kaynaklanan karasızlıklardan kaçınmak için hızlandırıcının betatron ayarı çok dikkatli
seçilmelidir.
Basit bir örnek verelim: Ayarın tamsayı bir değer olduğu bir hızlandırıcıda dipole alanında bir hata
olduğunu düşünelim. Bu durumda parçacık perturbasyon bölgesine her turda aynı faz ilişkisi ile
varacaktır. Alan hatasında kaynaklanan tekme (“kick”) parçacıkların her turunda sistematik olarak
eklenecek, salınımın genliği ta ki parçacıklar hızlandırıcının duvarlarında yok olana dek artacaktır.
HPFBU2012 - Enine Demet Dinamiği I
29
Öznur Mete
Betatron Ayarı
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
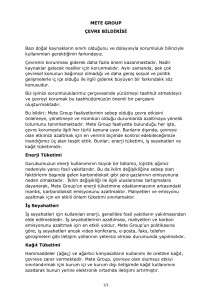
Rezonans Diagramı
Rezonanslara sebep olan istenilmeyen ayar
kombinasyonları bir ayar diagramında gösterilebilir.
Demetin ayar uzayında kapladığı alana “ayar ayakizi
(tune footprint)” denir.
Hızlandırıcının performansı ve deneylerdeki parçacık
ardalanı ayar diagramındaki ayakizine hassas bir şekilde
bağlıdır.
CERN-SL-2000-037-DI
HPFBU2012 - Enine Demet Dinamiği I
30
Öznur Mete
homojen olmayan hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
homojen olmayan hareket denklemi için parçacık gezingeni
y
∆p/p != 0
‣Demet
ρ
içinde momentum yayılımının sıfırdan
θ
farklı olduğu durumu inceleyelim.
dairesel koordinat sistemi
1
∆p 1
x + x( 2 − k) =
ρ
p0 ρ
!!
s
Sonraki sayfaya gidiniz. -->
homojen olmayan hareket denkleminin çözümü
∆p
x(s) = xβ (s) + D(s) ·
p
HPFBU2012 - Enine Demet Dinamiği I
31
Öznur Mete
Türetim - 3
Homojen olmayan hareket denkleminin türetilmesi
Türetim 2‘den hatırlayalım:
1
x
eB0
exg
x − (1 − ) =
+
ρ
ρ
mv
mv
!!
p = p0 + ∆p
Hesabımızı küçük bir momentum hatası olduğunu göz önüne alarak yineleyelim:
1
1
∆p
∆p << p0 →
≈
− 2
p0 + ∆p
p0
p0
1
x
eB0
∆p
exg
∆p
x − + 2 ≈
− 2 eB0 +
− xeg 2
ρ ρ
p0
p0
p0
p0
!!
k∗x
}
}
}
1
−
ρ
≈ 0 (x, ∆p → small)
1
∆p 1
x + x( 2 − k) =
ρ
p0 ρ
!!
Momentum yayılımı hareket denkleminin sağ tarafına ek bir terim getiriyor.
Review of CAS - Accelerator Physics' 09 May/2010
32
O.Mete
homojen olmayan hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
homojen olmayan hareket denklemi için parçacık gezingeni
y
∆p/p != 0
1
∆p 1
x + x( 2 − k) =
ρ
p0 ρ
!!
ρ
∆p
x(s) = xβ (s) + D(s) ·
p
θ
dairesel koordinat sistemi
s
x(s) = xh (s) + xi (s)
x!!h (s) + K(s) · xh (s) = 0
x!!i (s)
Dağılma (Dispersion)
HPFBU2012 - Enine Demet Dinamiği I
1 ∆p
+ K(s) · xi (s) = ·
ρ p
xi (s)
D(s) =
∆p/p
33
Öznur Mete
homojen olmayan hareket denklemi
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
homojen olmayan hareket denklemi için parçacık gezingeni
y
matris formalizmi
x(s) = xβ (s) + D(s) · ∆p/p
x(s) = C(s) · x0 + S(s) · x!0 + D(s) · ∆p/p
!
x
x!
"
=
s
!
C
C!
S
S!
"!
x
x!
"
∆p
+
p
0
!
ρ
"
D
D!
θ
dairesel koordinat sistemi
s
veya
x
C
x! = C !
∆p/p s
0
‣
‣
‣
S
S!
0
‣Dağılıma
iki-kutuplu magnetler
sebep olur.
‣Çarpıştırıcıların etkileşme
noktalarında dağılım değeri sıfır
olmalıdır.
x
D
D! · x!
∆p/p 0
1
İdeal parçacığın sahip olduğu yörünge dp/p = 0 için tanımlıdır.
Herhangi bir parçacığın yörüngesi ise
xβ
ve dağılımdan gelen terimin toplamına eşittir.
D(s), örgünün odaklama özelliklerine bağlı diğer bir yörüngeyi tanımlar.
HPFBU2012 - Enine Demet Dinamiği I
34
Öznur Mete
momentum sıkıştırması
Enine Demet Dinamiğinin Temel Kavramları
HPFBU2012
homojen olmayan hareket denklemi için parçacık gezingeni
y
∆p/p != 0
ρ
θ
s
dairesel koordinat sistemi
Momentum Sıkıştırması (compaction) Katsayısı
Dağılım fonksiyonu aracılığı ile parçacığın momentum dağılımı ve
boyuna hareketini ilişkilendirir.
Momentumu sapmış parçacıklar için yörüngenin uzaması:
δl!
∆p
= αcp
L
p
αcp
HPFBU2012 - Enine Demet Dinamiği I
1
=
L
αcp
2π
<D>
≈
< D >≈
L
R
!
D(s)
ds
ρ(s)
35
Öznur Mete
HPFBU
momentum sıkıştırması
Basic concepts of transverse and longitudinal beam dynamics
2012
homojen olmayan hareket denklemi için parçacık gezingeni
y
∆p/p != 0
ρ
θ
s
dairesel koordinat sistemi
Dört Kutuplu Hataları ve Renklilik (Quadrupole Error and Chromaticity)
‣Quadrupole hataları ayar (tune) kaymasına sebep olur.
‣ ∆Q quadrupole içindeki β fonksiyonu ile orantılıdır.
‣ Renklilik momentumdaki hatayı ayar kayması ile ilişkilendiren
∆Q =
!
s0 +l
s0
1
!
Q =−
4π
∆K(s)β(s)ds
4π
!
katsayıdır.
K(s)β(s)ds
! ∆p
∆Q = Q
HPFBU2012 - Enine Demet Dinamiği I
36
p
Öznur Mete
HPFBU2012
Örnek Problemler
ve
Ödevler
HPFBU2012 - Enine Demet Dinamiği I
37
Öznur Mete