ŞÖNT UYARMALI DC MOTOR
Şönt motorlar endüvi ve uyartım sargıları olmak üzere iki bölümden oluşurlar.
Uyartım sargıları paralel endüvi sargıları şönt bağlı motorlara denir. Motorun çalışması için
tek bir gerilim kaynağı yeterlidir.
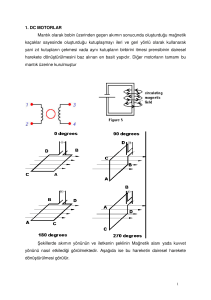
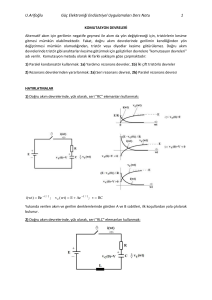
Şekilde şönt motor devresi görülemtedir. Şekilde A-B uçları endüvi, C-D uçları
uyartım sargılarını göstermektedir. Şekildeki direnç yolverme amaçlı olarak kullanılmaktadır.
Direncin L ucu şebekenin pozitifine R ucu endüvinin A ucuna, M ucu ise uyartım sargılarının
C ucuna bağlanır.
Şönt motorlarda yol verme : Şönt motorlar yol verme anında devreden çok fazla akım çeker,
çünkü yol verme anında endüvi harekete geçmemiş olucağından, endüvide zıt EMK oluşmaz.
Formulle göstermerilirse;
Eb= Km*φ*n eşitliğinde n devir sayısı sıfır olucağından zıt EMK da sıfır olur.
Şönt motorun yol alma anında momentinin yüksek olması, çok kısa sürede hızlanarak normal
devrine ulaşmasını sağlar. Momentin yüksek olması için M=Km* φ*IE formülüne göre
manyetik akının ve endüvi akımın yüksek değerlerde olması gerekir. Yol verme anında
manyetik akının yüksek olabilmesi için uyartım sargı direnci If nin devreden çıkartılması
gerekir. Bu durumda kutup sargılarından geçen akım yuksek olacağından oluşan
manyetik akıda yüksek olur. Buna bağlı olarakta moment artar.
Uyartım sargılarının devreden çıkartılması çok tehlikelidir, çünkü bütün yükün
endüvi sargılarından geçmesi motor devrinin sürekli artmasına neden olur. Endüvi
sargıları oluşan zıt EMK dan dolayı yanmaz ama motor devrinin sürekli artması motorun
kaçmasına neden olur.
Şönt motorlarda genel olarak endüvi direnci çok küçüktür, buda yol alma anında
endüviden fazla akım akmasına neden olur. Fakat motor yol aldıkça ve normal devrine
ulaşınca zıt EMK meydana gelir ve fazla akımı azaltır.
Motorun yükü arttıkça motor endüvisinde oluşan momentin artması gerekir.
Momentin artması için M=Km* φ*IE formülünde IE nin artması gerekir. IE nin artmas
devir formulune göre n= U- IE*RE /K φ, IE*RE çarpanı artacağından devir sayısı düşer.
ENDÜVİ DİRENCİNİN ÖLÇÜLMESİ:
Endüvi sargı direncinin bulunması için şekildeki devre düzeneği kurulur. Bu deneyde
endüvi sargılarındaki geçen akım ve düşen gerilime göre ohm kanunu kullanarak gerilim
bölüm akım formülüne dayanarak RE= (U-E)/IE formülü kullanılarak RE bulunur.
UYARTI DİRENCİNİN ÖLÇÜLMESİ:
Uyartı direncinin ölçülmesi için şekildeki devre kurulur. Bu deneyde uyartı
sargılarında ölçülen akım ve gerilim değerlerine göre ohm kanunu kullanılarak Rf direnci
hesaplanır.
BOŞTA ÇALIŞMA AKIMI:
Boşta çalışma deneyinde motorun ana hat akımı ölçülerek şönt motorun endüvi ve
uyartı sargılarında oluşan kayıplar hesaplanır. Bu kayıplar endüvi ve uyartı sargılarında
oluşan demir, rüzgar, vantilatör, bakır kayıpları olarak güç cinsinden hesaplanır.
I=IE+If
Daha önce hesapladığımız RE ve Rf değerleri kullanılarak;
PKE= IE2* RE ve PKf= If 2* Rf formülleriyle kayıplar bulunur.
ŞÖNT UYARTILI DC MOTORUN DEVİR KARAKTERİSTİĞİ:
Şönt motorda devir karakteristiği sabit kutup gerilimi ve sabit yük akımında, uyartı
akımı ile devir sayısı arasındaki bağıntıdır. Şekilde ki devredede görüldüğü gibi uyartı akımın
ölçmek için ampermetre uyartı devresine bağlanmıştır. Devir sayısı fomulüne göre;
n= U- IE*RE /K φ endüvi akımını sabit kabul edersek uyartım akımı
değişeceğinden ana kutup alanı değişicektir. Yani uyatı akımı azalırsa φ değeride azalır
ve n devir sayısı artar.
Aşağıdaki devir karaketeristiğindende görüldüğü gibi uyartı akımı azaldıkça moment artar.
Yapılan deneyler ve hesaplanan değerler sonucunda şönt motor eşdeğer devresi
yukarıdaki şekildeki gibi olur.