DAİRE DİYAGRAMININ ÇİZİLMESİ
Büyük güçlü motorlarda daire diyagramı çizilirken rs ihmal edilir. Bu durumda çemberin merkezi x
ekseni üzerinde olur ve bu şartlarda çizilen diyagrama Hayland daire diyagramı denir. Bu diyagramda
demir kayıpları ihmal edilmiştir. Ossanna daire diyagramını çiziminde bu direnç dikkate alınacaktır.
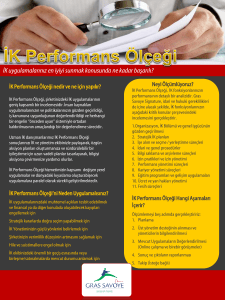
OSSANNA DAİRE DİYAGRAMININ BAZI NOKTALARININ ÖZELLİKLERİ
Ossanna daire diyagramı yardımıyla asenkron motorun yüklenmeden yani yük deneyleri yapılmadan
makinenin ilgili bütün karakteristiklerini çıkarmak mümkündür.
Vs
k
Me
P
s
)d
( s k Rotor bakır
kaybı
kd
o
ks.
ent e
Mom
P (s )
M
s 0
a) Generatör ve fren bölgelerini ayıran P noktasının özelliği
s
rR 2
IR
s
s = için P1 0 olur.
P1 PS PQS
PS PQS olur.
Yani motor şebekeden kendi kayıplarını karşılamak için bir güç çeker.
P1 Pm P2
P 2 Pm
P 2 Pelk PQ R
Pelk 0
PFe
Elk. Güç
ekseni
T
Asenkron generatör
P1 m R
Fren çalışma
Stator demir ve
bakır kaybı
Po (s 0)
P2
.
eks
Pk (s 1) s 1
s
0
üç
kg
ani
P2 PQ R Pm
Motor milden aldığı gücü rotor bakır kayıplarına harcar.
b) Güç ve moment eksenlerinin belirtilmesi
1. Elektriki güç ekseni
Daire diyagramı üzerinde herhangi bir P noktası alalım.
P T I SW I S cos (aktif bileşen)
OT I SdW I S sin (reaktif bileşen)
O T yani stator akımının reaktif bileşeni makinanın mıknatıslanması için gerekli olan bileşendir. Bu
durumda şebekeden çekilen aktif güç;
PS 3VS I S cos
PS 3VS I SW
PS 3VS .( P T x akım ölçeği)
P T mesafesi güç ölçeği ile çarpıldığında aktif gücü belirtir. Bu nedenle x eksenine elektriki güç ekseni
adı verilir.
2. Mekanik güç ekseni
Diyagramda Po ve Pk noktaları için mekanik güç sıfırdır.Yani boşta çalışmada ve kalkış anında mekanik
güç alınmaz.
s = 1 için M = 0 Pm=0 (Pk noktası)
s = 0 için M 0 Pm=0 (Po noktası)
Bu özellikler yardımıyla Po ve Pk noktalarından geçen doğruya mekanik güç ekseni denir.
3. Moment ekseni
P noktası için s = olduğundan;
P1 m R
rR 2
I R 0 olur.
s
P1 Pm P 2 0
Pm P 2
s = 0 ve s = için M = 0
Po ve P noktalarında M=0 olduğundan Po ve P noktalarından geçen eksen moment eksenidir.
NOT: Anlatmakta olduğumuz Ossanna daire diyagramının bu şeklinde sürtünme ve vantilasyon kayıpları
ihmal edilmiştir. Bu nedenle Pm = Pf + Psv eşitliğine göre Pm = Pf
alınmıştır. Böylece mekanik güç
eksenine faydalı güç ekseni de denir. Gerçekte ise mekanik güç eksenine Psv kayıpları ilave edilerek
paralel bir şekilde yukarıya yeni bir eksen çizilirse gerçek faydalı güç ekseni bulunur.
DİYAGRAMIN ÇİZİMİ
Diyagramı çizmek için 2 deney yapılır
1)Boşta çalışma deneyi
Motor Vs (fazlar arası) nominal geriliminde çalıştırılır ve şebekeden çektiği aktif güç ve akım ölçülür. Bu
değerler yardımıyla boşta çalışmadaki güç faktörü hesaplanır ve so açısı bulunur.
cos so
Pwo
3VSFN I SO
Orijinden yatay bir doğru ve bu doğruya dik başka bir doğru çizilir. Yatay doğru elektriki güç ekseni ve
buna dik doğru da stator gerilim vektörüdür.
Akım ölçeği dikkate alınarak, dik eksenle so açısı yapacak şekilde Iso akım vektörü çizilir. Bu vektörün
uç noktası Po noktasıdır. Po noktasında s=0 dır.
2)Kısa devre çalışma deneyi
Bu deneyde makine bilezikli ise yolverme reostası devre dışı bırakılır. Daha sonra stator sargılarına
sıfırdan başlanarak bir ototrafo yardımıyla yavaş yavaş gerilim uygulanır. Bu sırada motor faz
sargılarından geçen akım izlenir. Akım değeri etiketteki nominal değere ulaşınca şebekeden çekilen güç
ve sargılara uygulanan gerilim ölçülür. Bu gerilim nominal kısa devre gerilimidir. Bu değerler yardımıyla
kısa devre çalışmada güç faktörü bulunur.
cos sk
Pkd
3VskFN I sn
Ayrıca nominal gerilime karşı gelen kısa devre akımı bulunur. Akım ölçeğini dikkate alarak, dik eksenle
sk açısı yapacak şekilde (Is)kd akım vektörü çizilir. Bu vektörün uç noktası Pk noktasıdır. Pk noktasında
s=1 dir.
(I s ) kd
Vs
I sn (nominal gerilime karşı gelen kısa devre akımı)
Vsk
NOT: Kısa devre deneyi sırasında motor milinin dönmemesi gerekir.
İki deneyden hemen sonra sargılar soğumadan statorun bir fazının direnci veya üç faz direncinin
ortalaması bulunur. Bu değer moment ekseninin çizilmesi için gereklidir.
3) Dairenin merkezinin bulunuşu ve mekanik güç ekseninin çizilmesi
Po noktasından elektriki güç eksenine paralel bir doğru çizilir.
Po ve Pkd noktaları birleştirilir. Elde edilen bu kirişin orta noktasından, daha önce Po noktasından
çizilen yatay doğruya bir dikme inilir ve dikmenin bu yatay doğruyu kestiği nokta dairenin merkezi
(M) olarak bulunur.
Merkez bulunduktan sonra, yarıçap da belli olduğundan daire çizilir. (r MPo MPk )
Mekanik güç, diyagramda gösterilen Po ve Pkd noktaları için sıfırdır. Yani boşta çalışmada ve kalkış
anında mekanik güç alınmaz.
s=1 için M≠0 Pm=0 (Pkd noktası)
s=0 için M≈0 Pm=0 (Po noktası)
Bu özellikler yardımıyla Po ve Pkd noktalarından geçen doğruya mekanik güç ekseni denir. Bu yöntemle
yapılan bütün çizim ve hesaplamalarda mekanik kayıplar (sürtünme ve vantilasyon) dikkate alınmamıştır.
Asenkron makinede mekanik güç (Pm), milden alınan faydalı güç (Pf) ile sürtünme ve vantilasyon
kayıplarının (Psv) toplamıdır. Pm = Pf olarak kabul edildiğinden mekanik güç eksenine faydalı güç ekseni
de denir. Gerçekte ise mekanik güç eksenine Psv kayıpları ilave edilerek paralel bir şekilde yukarıya yeni
bir eksen çizilirse gerçek faydalı güç ekseni bulunur.
4) P noktasının bulunması ve moment ekseninin çizilmesi
Moment eksenin çizilebilmesi için P noktasının bulunması gerekir. P noktasının bulunabilmesi için,
diyagramda f noktasının yerinin bilinmesi dolayısıyla ef ile gösterilen mesafenin bulunması
gereklidir.
Bunun için Pk noktasından elektriki güç eksenine bir dikme inilir. Bu dikmenin merkezin bulunduğu
doğruyu kestiği noktaya “e” denir.
ef ise aşağıdaki formülle hesaplanır. ef ’nin birimi mm’dir.
rs x ( I s ) 2kd
ef
VSFN x A.Ö.
Burada VSFN; nominal faz-nötr gerilimi, rs; stator direncidir. rs direncinin verilmediği zamanlarda f
noktası yaklaşık olarak de ’ nin orta noktası alınır.
f noktasının yeri bulunduktan sonra Af doğrusu çizilir. Boşta çalışma ve kısa devre çalışma
noktalarında milden alınan momentler sıfır olduğundan, moment ekseninin P0 noktasından başlaması
gerekir.
Çizilen bu doğruya “moment ekseni” denir. Diyagramda de mesafesi güç ölçeği ile çarpılırsa, kısa
devre durumunda rotor ve statorun toplam bakır kayıpları bulunur. df rotor, ef ise stator bakır
kayıplarına eşittir.
5) Kayma doğrusunun çizilmesi
Elektriki güç ekseni altında bir H noktası seçilir. (Çizim kolaylığı için Pk noktasından aşağıya inilen
de doğrusu uzatılarak H noktası bulunabilir.)
H ile Po, Pk ve P noktaları birleştirilir.
HP ’a paralel olmak şartı ile HPo ve HPk doğrularını kesen bir doğru çizilir. Bu doğruya “kayma
doğrusu” denir. Kayma doğrusunun HPo ’ı kestiği nokta s=0 kayma noktası, HPk ’ yı kestiği nokta
ise s=1 kayma noktasıdır.
Kayma doğrusu 0.1 , 0.2 , 0.3 ,....şeklinde 10 eşit parçaya bölünür.
Daha sonra incelenmesi istenen kayma değeri bu doğru üzerinde işaretlenir ve H noktası ile
birleştirilerek uzatılıp, daireyi kestiği nokta bulunur.
Bu noktadan aşağıya inilen dikme yardımı ile verim, güç katsayısı, moment gibi değerler, ölçekler
dikkate alınarak bulunur.
6) Ölçekler
a) Akım ölçeği : 1 mm i A olduğu kabul edilir.
b) Güç ölçeği : 1 mm 3 Vs i . Burada Vs (faz-faz), makinenin nominal gerilimidir. Güç ölçeğinin birimi
W,VAr ve VA olabilir. Bu bağıntı bütün güçler için geçerlidir.
c) Moment ölçeği : 1 mm 0.973
3 Vs i
Güç Ölçegi
(Birimi kgm’dir.).
0.973
ns
ns
1BG=746W=0,746kW=76kgm
1kW=1 / 0,746 BG ise 1kW=1,34BG
1kW=1,34BG ise 1kW=1,34.76= 101,84kgm
P=.M=(2n/60).M
P=
2πn
M = 1,028.10 3.n.M
60.101,84
M
P
973.P
3
n
n.1,028.10
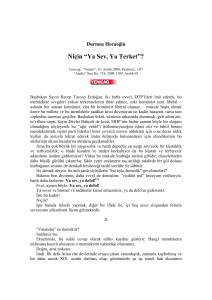
Örnek Uygulama İçin Daire Diyagramı Üzerinde Çeşitli Büyüklüklerin Bulunması
Vn
P
Pk
(s=%10)
s=1
d
(Is)kd
f
kd
eni
Eks
eni
Eks
G üç
k
i
n
G üç
a
)
k
ş
ı
e
M
(Çık
dalı
Fay
P
s
Eksen
Moment
i
h
0
P0
O
A
s=0
I0
k
b
s=1
M
j
e
0.7
Şebekeden Çekilen
Elektriki Güç Ekseni
0.5
0.3
0.1
s=0
H
Etiket değerleri 3.3 kW, 220/380 V, 13.6/7.9 A, 935 d/d, 50 Hz olan bilezikli bir asenkron motorun daire diyagramı
İnceleme yapabilmek için şekilde gösterildiği gibi, kayma doğrusu üzerinde s=0.1 noktası bulunarak H
noktası ile birleştirilir ve daireyi kesene kadar uzatılır. Bulunan bu nokta (P noktası) motorun %10 kayma
ile çalıştığı noktadır. Bu noktadan aşağı inilen dikme yardımı ile %10 kayma için istenen değerler
bulunur. P noktasından elektriki güç eksenine inilen dikmenin diğer eksenleri kestiği yerler harflendirilir
ve istenen büyüklükler aşağıdaki gibi hesaplanır.
Mekanik güç
: Ph mesafesi ile güç ölçeği çarpılarak bulunur.
Moment
: Pk mesafesi ile moment ölçeği çarpılarak bulunur.
Şebekeden çekilen elektriki güç : Pj mesafesi ile güç ölçeği çarpılarak bulunur.
Stator akımı
: OP mesafesi ile akım ölçeği çarpılarak bulunur.
PFe demir kayıpları
: bj mesafesi ile güç ölçeği çarpılarak bulunur.
Rotor bakır kayıpları
: hk mesafesi ile güç ölçeği çarpılarak bulunur.
Stator bakır kayıpları
: kb mesafesi ile güç ölçeği çarpılarak bulunur.
Güç faktörü
: cos
Verim
:
ÇIKIS GÜCÜ Ph
GIRIS GÜCÜ Pj
Kayma
:s
hk
Pk
Pj
OP
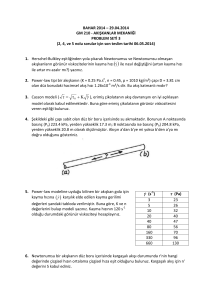
Maksimum Değerlerin Bulunması
a) Maksimum moment: Dairenin merkezinden moment eksenine bir dik çizilir ve daireyi kesene kadar
uzatılır. Dikin daireyi kestiği çalışma noktası maksimum moment noktasıdır. Bu noktadan elektriki güç
eksenine bir dik çizilir. Maksimum moment noktası ile moment ekseni arasındaki mesafe, moment ölçeği
ile çarpılarak, maksimum moment (kgm) olarak bulunur.
Vs
üç
Pk (s 1)
( s ) kd
ik g
kan
Me
.
eks
s.
A(s=1)
ent ek
Mom
f
P (s )
.
kd
o
0
Po (s 0)
e
M
B(s=0)
.
H
PFe
b) Maksimum mekanik güç: Mekanik güç ekseninden, merkezin bulunması için çizilen dik doğru
daireyi kesene kadar uzatılır. Dikin daireyi kestiği çalışma noktası maksimum mekanik güç noktasıdır. Bu
noktadan elektriki güç eksenine bir dik çizilir. Maksimum mekanik güç noktası ile mekanik güç ekseni
arasındaki mesafe, güç ölçeği ile çarpılarak, maksimum mekanik güç (W) olarak bulunur.
Vs
.
eks
üç
ik g
kan
Me
Pk (s 1)
( s ) kd
A(s=1)
f
.
P (s )
kd
o
0
e
M
Po (s 0)
B(s=0)
PFe
.
H
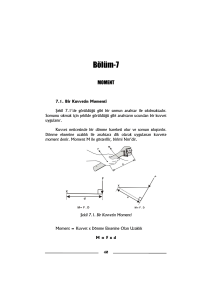
c) Maksimum elektriki güç: Dairenin merkezinden elektriki güç eksenine bir dik çizilir ve daireyi
kesene kadar uzatılır. Dikin daireyi kestiği çalışma noktası maksimum elektriki güç noktasıdır. Bu nokta
ile elektriki güç ekseni arasındaki mesafe, güç ölçeği ile çarpılırsa maksimum elektriki güç (W) olarak
bulunur.
Vs
Pk (s 1)
( s ) kd
A(s=1)
f
.
kd
o
0
Po (s 0)
e
M
B(s=0)
ik
kan
Me
.
H
güç
.
eks
s.
ent ek
Mom
P (s )
PFe
d) Maksimum coss: Bu noktayı bulmak için minimum (s) bulunmalıdır. Bunun için orijinden daireye
teğet çizilir. Teğetin daireyi kestiği çalışma noktası maksimum coss noktasıdır. Bu noktadan elektriki
güç eksenine bir dik çizilir ve coss hesaplanır.
Vs
Pk (s 1)
( s ) kd
ik g
kan
Me
.
eks
üç
s.
A(s=1)
ent ek
Mom
f
P (s )
.
kd
o
0
e
M
Po (s 0)
PFe
.
B(s=0)
H
e) Maksimum verim: Maksimum verim nominal kaymada vardır. Bunun için nominal kayma hesaplanır
ve kayma doğrusunda işaretlenir. Bu nokta H noktası ile birleştirilerek uzatılır. Daireyi kestiği noktadan
elektriki güç eksenine bir dik çizilir ve bu dik doğru üzerinde verim () hesaplanır.
Vs
Pk (s 1)
( s ) kd
ik
kan
Me
.
eks
güç
s.
A(s=1)
ent ek
Mom
f
P (s )
.
kd
o
0
Po (s 0)
e
M
B(s=0)
PFe
.
H
Açıklanan bu 5 maksimum noktanın diyagram üzerinde gösterilebilmesi için kayma değerlerinin
bilinmesi gereklidir. Bunun için, maksimum nokta H noktası ile birleştirilir ve kayma doğrusunu kestiği
yer okunarak, bu noktadaki kayma değeri bulunabilir.
Karakteristikler
Etiket değerleri 3.3 kW, 220/380 V, 13.6/7.9 A, 935 d/d, 50 Hz olan bilezikli bir asenkron motorun yaklaşık
karakteristikleri