Devre Denklemleri
0
AT
0
KAY:
AI 0
KGY:
ATVd V
ETB:
M (w)V N ( w) I U s
A Vd 0
I
0 V 0
M ( w) N ( w) I U s
0
T (w)
T ( w) ˆ T 0 jwT1
Hatırlatma
Hatırlatma
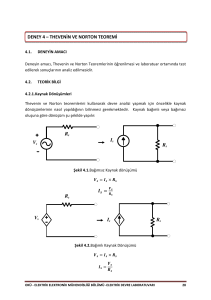
Direnç Devreleri
0
AT
0
0
I
M
A vd (t ) 0
0 v(t ) 0
N i(t ) us (t )
T
vd (t ), v(t ), i (t )
Sürekli Sinüsoidal Hal
0
AT
0
A Vd 0
I
0 V 0
M ( w) N ( w) I U s
0
T (w)
Vd ,V , I
Zamanın fonksiyonu olan vektörler Elemanları fazör olan vektörler
T’nin elemanları reel sayılar
T(w)’nın son ne satırı kompleks sayılar
Devre reel katsayılı, lineer,
cebrik denklem takımı ile
tanımlanmıştır.
Devre kampleks katsayılı, lineer,
cebrik denklem takımı ile
tanımlanmıştır.
Hatırlatma
v
0
0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1 0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1 0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
G1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
G2
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
jC1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
jC 2
0
0
0
0
0
0
0
1 0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
1 0
0
0
0
0
0
0
0 Vd 1 0
0 Vd 2 0
0 Vd 3 0
1 Vd 4 0
0 V1 0
0 VR1 0
0 VR 2 0
0 VC1 0
0 VC 2 0
0 V p 0
0 Vn 0
0 Vo 0
0 I1 1
0 I R1 0
0 I R 2 0
0 I C 1 0
0 I C 2 0
0 I p 0
0 I n 0
0 I o 0
Devre Denklemleri: Genelleştirilmiş Düğüm Gerilimleri Yöntemi
KAY:
AI 0
KAY:
AI 0
KGY:
ATVd V
KGY:
ATVd V
ETB:
M (w)V N ( w) I U s
ETB:
M (w)V N ( w) I U s
Yöntem:
I Y (w)V I s
1. Adım: nd 1 düğüm için KAY’nı yaz
AI 0
I1
[ A1 A2 ] 0
I2
2. Adım: 1. grup elemanların eleman tanım bağıntılarını yerleştir,
2. grup elemanların eleman tanım bağıntılarını yaz.
V1
[ A1Y1 (w) A2 ] A1I S
I2
V2
[ M (w) N ( w)] U S
I2
3. Adım: eleman gerilimlerini düğüm gerilimleri cinsinden yaz
V1 A1TVd
V2 A2TVd
A1Y1 ( w) A1T
T
M
(
w
)
A
2
A2 Vd A1I S
U
I
N ( w) 2 s
4. Adım: düğüm gerilimlerini ve ikinci grup elemanların akımlarını bul
Örnek: Genelleştirilmiş düğüm gerilim yöntemine ilişkin denklemleri
yazınız.
v
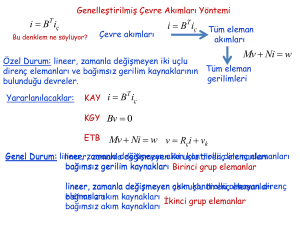
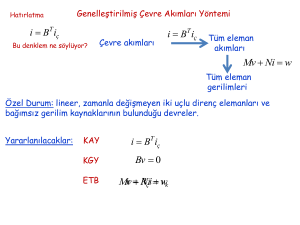
Devre Denklemleri: Genelleştirilmiş Çevre Akımları Yöntemi
KAY:
KGY:
ETB:
Yöntem:
I BT IÇ
BV 0
M (w)V N ( w) I U s
KAY:
KGY:
ETB:
I BT IÇ
BV 0
M (w)V N ( w) I U s
V Z ( w) I Vs
1. Adım: ne nd 1 göz için KGYı’nı yaz Bv 0
V1
[ B1 B2 ] 0
V2
2. Adım: 1. grup elemanların eleman tanım bağıntılarını yerleştir,
2. grup elemanların eleman tanım bağıntılarını yaz.
I1
[ B1Z1 (w) B2 ] B1Vk
V2
V2
[ M (w) N ( w)] U S
I2
4. Adım: çevre akımlarını ve ikinci grup elemanların gerilimlerini bul
3. Adım: eleman akımlarını çevre akımları cinsinden yaz
I1 B1T I ç
I 2 B2T I ç
B1Z1 ( w) B1T
T
N
(
w
)
B
2
B2 I ç B1Vs
U
V
M ( w) 2 S
4. Adım: çevre akımlarını ve ikinci grup elemanların gerilimlerini bul
Toplamsallık ve Çarpımsallık Özelliği
Teorem: (Toplamsallık)
Lineer direnç, kapasite, endüktans elemanları
1. Grup bağımsız kaynaklar
+Bağımsız kaynaklar
2. Grup bağımsız kaynaklar
1. Grup bağımsız kaynaklar devrede, 2. grup bağımsız kaynaklar
devre dışı iken devre çözülsün
I1,V1
2. Grup bağımsız kaynaklar devrede, 1. grup bağımsız kaynaklar
devre dışı iken devre çözülsün
I 2 ,V2
Devrede tüm bağımsız kaynaklar varken ki çözüm
IT I1 I 2 ,
VT V1 V2
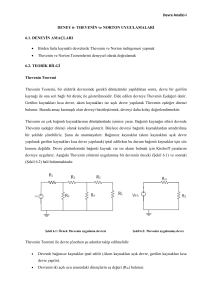
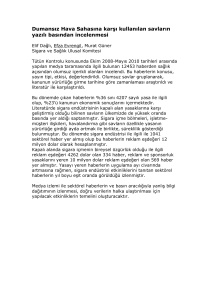
i6 =2i
i
ik1 =cos2t
Vk2 =sin(3t+15)
R1
C6
ik1
L3
R2
C5
+
-
Vk2
R1 = R1 = 1 ohm
C4 = C 5 = 1 F
L 3 =1 H
V6(t) gerilimini belirleyiniz.
Teorem: (Çarpımsallık)
Lineer direnç, kapasite, endüktans elemanları+Bağımsız kaynaklar
Lineer direnç, kapasite, endüktans elemanları elemanları +Bağımsız
~ ~
kaynakların değeri k katına çıkarılsın ve devre çözülsün
I ,V
I ,V
~
I kI
~
V kV
Thevenin (1883) ve Norton (1926) Teoremleri
Amaç: Lineer, zamanla değişmeyen çok uçlu, iki uçlu direnç kapasite
endüktans ve bağımsız akım ve gerilim kaynaklarından oluşmuş bir N 1kapılısının basit bir eşdeğerini elde etmek.
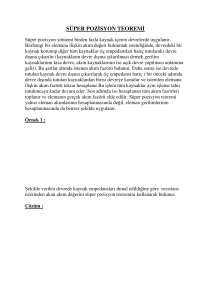
Thevenin Eşdeğeri:
i
+
N
1-Kapılısı v
_
ZTH
+
_
VTH
i
+
v
_
ZTH Thevenin eşdeğer empedansı
VTH Açık devre gerilimi
Devredeki tüm bağımsız kaynaklar
devre dışı iken 1-1’ uçlarından görülen
eşdeğer empedans
1-1’ uçları açık devre iken 1-1’ uçları arasındaki
gerilim
Thevenin Teorem: N 1-kapılısının uçlarına i değerinde bir akım kaynağı
bağlandığında tüm i değerleri için tek çözümü varsa ( tek v değeri
belirlenebiliyorsa) Thevenin eşdeğeri vardır.
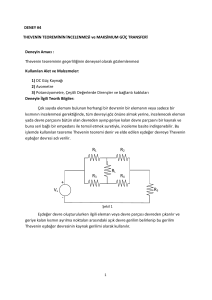
Norton Eşdeğeri:
i
+
N
1-Kapılısı v
i
_
GN Norton eşdeğer admitansı
+
IN
YN
v
_
Devredeki tüm bağımsız kaynaklar devre
dışı iken 1-1’ uçlarından görülen eşdeğer
admitans
iN Kısa devre akımı
1-1’ uçları kısa devre iken 1-1’ uçlarındaki akım
Norton Teorem: N 1-kapılısının uçlarına v değerinde bir gerilim kaynağı
bağlandığında tüm V değerleri için tek çözümü varsa ( tek I değeri
belirlenebiliyorsa) Norton eşdeğeri vardır.
• Thevenin Eşdeğeri:
V ZTH I VTH
N kapılısı akım kontrollü değilse Thevenin eşdeğeri yok
• Norton Eşdeğeri:
I YNV I N
N kapılısı gerilim kontrollü değilse Norton eşdeğeri yok
• ZTH 0, V 0
•
YN 0, I 0
VTH
IN
ZTH
VTH
IN
YN
ZTH 0,
Norton eşdeğeri yok
YN 0, Thevenin eşdeğeri yok