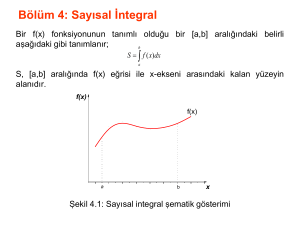
LİNEER SİNGÜLER VE SİNGÜLER OLMAYAN İNTEGRAL
DENKLEMLERİNİN YAKLAŞIK ÇÖZÜMLERİ ÜZERİNE BİR
ÇALIŞMA: FRACTURE MEKANİK
Mustafa EKİCİ
YÜKSEK LİSANS TEZİ
MATEMATİK
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
HAZİRAN 2010
ANKARA
Mustafa EKİCİ tarafından hazırlanan Lineer Singüler ve Singüler Olmayan İntegral
Denklemlerinin Yaklaşık Çözümleri Üzerine Bir Çalışma: Fracture Mekanik adlı bu
tezin Yüksek Lisans tezi olarak uygun olduğunu onaylarım.
Doç. Dr. Fatma AYAZ
Tez Danışmanı, Matematik Anabilim Dalı
Bu çalışma, jürimiz tarafından oy birliği ile Matematik Anabilim Dalında Yüksek
Lisans tezi olarak kabul edilmiştir.
Doç. Dr. Fatma TAŞDELEN
Matematik A.B.D, Ankara Üniversitesi
…………………….
Doç. Dr. Adil MISIR
Matematik A.B.D, Gazi Üniversitesi
.....………………….
Doç. Dr. Fatma AYAZ
Matematik A.B.D, Gazi Üniversitesi
……………………….
Tarih:
23/06/2010
Bu tez ile G.Ü. Fen Bilimleri Enstitüsü Yönetim Kurulu Yüksek Lisans derecesini
onamıştır.
Prof. Dr. Bilal TOKLU
Fen Bilimleri Enstitüsü Müdürü
……………………………….
TEZ BİLDİRİMİ
Tez içindeki bütün bilgilerin etik davranış ve akademik kurallar çerçevesinde elde
edilerek sunulduğunu, ayrıca tez yazım kurallarına uygun olarak hazırlanan bu
çalışmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf
yapıldığını bildiririm.
Mustafa EKİCİ
iv
LİNEER SİNGÜLER VE SİNGÜLER OLMAYAN İNTEGRAL
DENKLEMLERİNİN YAKLAŞIK ÇÖZÜMLERİ ÜZERİNE BİR
ÇALIŞMA: FRACTURE MEKANİK
(Yüksek Lisans Tezi)
Mustafa EKİCİ
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
Haziran 2010
ÖZET
Bu tez beş bölümden oluşmaktadır. Birinci ve ikinci bölümünde integral
denklemlerin
bulunması,
tarihi
gelişimi,
daha
sonraki
bölümlerde
kullanacağımız bazı genel kavramlar ve teoremler verilmiştir. Üçüncü bölümde
integral denklemlerinin tipleri ve sınıflandırılmasına yer verilmiştir. Dördüncü
bölümde ise sadece Fredholm ve Volterra integral denklemleri için analitik
çözüm yöntemleri verilmiş ve her biri birer örnekle açıklanmıştır. Son bölümde
de sadece nümerik çözüm üzerine odaklanılmış ayrıca 2. tip singüler integral
denklemlerinin uygulama problemlerine yer verilmiştir
Bilim Kodu
Anahtar Kelimeler
Sayfa Adedi
Tez Yöneticisi
: 204.1.138
: Volterra-Fredholm ,İntegral denklemler,Singüler
: 93
: Doç.Dr.Fatma AYAZ
v
A STUDY OF LİNEAR SİNGULAR AND NON-SİNGULAR
İNTEGRAL EQUATİON ON APROXİMATE SOLUTİONS:
FRACTURE MECHANİC
(M.Sc. Thesis)
Mustafa EKİCİ
GAZİ UNIVERSITY
INSTITUTE OF SCIENCE AND TECHNOLOGY
July 2010
ABSTRACT
This thesis consists of five parts. In the first and second parts, the discovery of
Integral equations, historical devolopment, some fundamental concepts and
theorems which are going to be used in the following parts were explained. In
the third part, type of Integral equations and their classification have been
mentioned. In the fourth part, the analitic solving methods for only Fredholm
and Volterra Integral equations were studied and each was explained by an
example. In the last part, only approximation solution has been focused and also
the application problems of the second type of singular Integral equations have
been mentioned.
Science Code : 204.1.138
Key words : Volterra-Fredholm,Integral equations,Singular
Page Number : 93
Adviser
: Assoc.Prof.Dr.Fatma AYAZ
vi
TEŞEKKÜR
Çalışmalarım boyunca yardım ve katkılarıyla beni yönlendiren değerli Hocam Doç.
Dr. Fatma AYAZ ’a, maddi olarak bana destek sağlayan TÜBİTAK’ a, manevi
destekleriyle beni hiçbir zaman yalnız bırakmayan aileme, ayrıca çok değerli
arkadaşlarım Öznur AKTAŞ ve Fatih SARIKAYA’ya teşekkürü bir borç bilirim.
vii
İÇİNDEKİLER
Sayfa
ÖZET .......................................................................................................................... iv
ABSTRACT................................................................................................................ v
TEŞEKKÜR …………………….………………………………………………..…vi
İÇİNDEKİLER .......................................................................................................... vii
ÇİZELGELERİN LİSTESİ........................................................................................ix
ŞEKİLLERİN LİSTESİ ............................................................................................. x
SİMGELER VE KISALTMALAR.............................................................................xi
1. GİRİŞ ...................................................................................................................... 1
2. TEMEL TANIMLAR VE TEOREMLER…………………………………………4
3. İNTEGRAL DENKLEMLERİNİN TİPLERİ VE SINIFLANDIRMASI ….…… 8
3.1. Lineer ve Lineer Olmayan İntegral Denklemler……………….………..…….8
3.2. Singüler İntegral Denklemler …………………………….…………………..8
3.3. Singüler Olmayan İntegral Denklemlerinin Tiplerine Göre Sınıflandırılması..9
3.4. Homogen ve Homogen Olmayan İntegral Denklemler …….……………….10
3.5. Volterra ve Fredholm İntegral Denklemler.…………………………….……10
3.6. Abel İntegral Denklemi ……………….……………………………………..11
3.7. Wiener-Hopf İntegral Denklemi……………………………………………..12
3.8. Cauchy Tekil İntegral Denklemi ……………………………………………12
3.9. İntegro-Diferansiyel Denklemler ……………………………………............13
3.10. Parametreli İntegral Denklemler …………………………………………...13
3.11. Fox İntegral Denklemi ……………………………………………………..14
3.12. Konvolisyon İntegral Denklem ………………………………………….…14
3.13. İntegral Denklemlerle Diferansiyel Denklemler Arasındaki İlişki ……......14
4. İNTEGRAL DENKLEMLERİNİN ÇÖZÜM YÖNTEMLERİ…………………. 24
4.1. Fredholm İntegral Denklemlerinin Çözüm Yöntemleri……………………...24
4.1.1.Sabit çekirdekli integral denklemler………….……….…………….....24
viii
Sayfa
4.1.2. Dejenere çekirdekli integral denklemler ……………………………..27
4.1.3. Dejenere çekirdekli 2.tip fredholm integral denklemlerinin
çözümleri için bir genel yöntem……….…………..………………….30
4.1.4. İtere çekirdek ………………………...…….…………………………35
4.1.5. Ardışık yaklaşımlar metodu …………………...….………………….39
4.1.6. Çözücü çekirdek ………………..….………………………………....44
4.1.7. Çekirdek ile çözücü çekirdek arasındaki ilişki ………….….……...…45
4.1.8. Çözücü çekirdeğin itere çekirdekler yardımıyla bulunması……..……46
4.1.9. Determinantlar yöntemi ……………….……………………………...51
4.2. Volterra integral denklemlerinin çözüm yöntemleri ………...….…..…….....54
4.2.1. Konvolisyon teoremi……………….…………………………..……..54
4.2.2. Laplace dönüşümü ile volterra integral denkleminin çözümü …….....55
4.2.3. Gama ve Beta fonksiyonları …………………………….…………....59
4.2.4. Volterra integral denklemlerini gama ve beta fonksiyonları
Yardımıyla çözülmesi.………………………………………………..61
4.2.5. Volterra integral denklemlerinin çözücü çekirdek(resolvant)
Yardımıyla çözülmesi ………...…………………………………..….65
5.SAYISAL YÖNTEMLER……………………………………...………………....70
5.1. İkinci Tip Volterra İntegral Denklemleri İçin Quadrature metot……….…….70
5.2. İkinci Tip Singüler İntegral Denklemler İçin Gauss-Jacobi
Quadrature Formülü ………………………………………………………….75
5.3. İkinci Tip Lineer Volterra İntegral Denklemlerinin
Trapezoid Quadrature ve Block by Block Metodu ile Çözümü …..…...…….84
KAYNAKLAR ..........................................................................................................92
ÖZGEÇMİŞ ...............................................................................................................93
ix
ÇİZELGELERİN LİSTESİ
Çizelge
Sayfa
Çizelge 5.1. Quadrature metot ile yaklaşık çözümler ve analitik çözüm………....74
Çizelge 5.2. Düğüm noktaları ve g (ζ i ) yaklaşık çözümleri…………………….. 80
Çizelge 5.3. Tekrarlı Trapezoid yöntemi ile yaklaşık çözümleri...……………….88
Çizelge 5.4. Block by Block yöntemi ile yaklaşık çözümler …………………….91
x
ŞEKİLLERİN LİSTESİ
Şekil
Sayfa
Şekil 5.1. Kare uçlu düz matkap elastik yarı düzlemde kayarken…………………79
Şekil 5.2. Kare uçlu dalgalı matkap elastik bir yarı düzlem üzerinde kayarken…. 82
Şekil 5.3. Dalgalı ve düz uçlu matkapların karşılaştırılması................................... 83
xi
SİMGELER VE KISALTMALAR
Bu çalışmada kullanılmış bazı simgeler, açıklamaları ile birlikte aşağıda
sunulmuştur.
Simgeler
A
Açıklama
A ’ nın normu
φ ′( x)
φ ( x) fonksiyonunun türevi
JJG
A
A matrisi
L
Laplace Dönüşümü
L −1
Ters Laplace Dönüşümü
D (λ )
Fredholm Determinantı
D ( x, t ; λ )
Fredholm minörü
( xn )
n elemanlı bir dizi
K ( x, t )
Çekirdek
1
1. GİRİŞ
İntegral denklemler kısaca; bilinmeyen fonksiyonun integral işareti altında
bulunduğu denklemler olarak tanımlanabilir. Ancak bu tanım yetersiz kalmaktadır.
Çünkü bu tanımdan hareket ederek, integral denklemlerin hepsini kapsayacak bir
teori kurmak mümkün değildir. Bu nedenle her integral denklemi kendi içinde
değerlendirmek doğru olacaktır. Böylece çok geniş bir araştırma sahası açılmış
olmakta ve konu ayrıntılı bir inceleme konusu gerektirmektedir [1].
Fizik ve mühendislik uygulamalarda zaman zaman bilinmeyen fonksiyonun integral
işareti altında olduğu denklemlerle karşılaşılır ve bu tür denklemlere yukarıda da
belirtildiği gibi integral denklemler denir. Diferansiyel denklemlerle integral
denklemler arasındaki en büyük fark, diferansiyel denklemlerin tek başlarına bir
problemi tanımlamaya yetmemeleridir. Onlara sınır veya başlangıç şartları ilave
edilmesi gerekir. Ancak integral denklemler ise ilave şartlara gerek kalmadan bir
problemin tam tanımını vermektedirler.
İntegral denklemlerle ilgili ilk çalışmalar 19.yüzyılın ilk yarısında başlamıştır.
Önceleri dağınık ve rastgele araştırmalar yapılmışken, aynı yüzyılın sonlarına doğru
daha sistematik ve bilinçli araştırmaların yapıldığı ve bir takım sonuçlar alınmaya
başlandığı izlenmektedir. ABEL, 1823 yılında bir mekanik problemini incelerken ilk
defa integral denkleme rastladığı bilinmektedir. Ancak integral denklemi kavramını
Du Bois REYMOND’ un 1888 yılında yayınlanan bir çalışmasında önerdiği
anlaşılmaktadır. 1822 yılında da Vean B. Joseph Fourier, trigonometrik serilerden
yararlanarak ısı probleminin çözümünde kullanılan,
f ( x) =
f ( x) =
2
π
2
π
∞
. ∫ sin ( xy ).ϕ ( y ).dy
0
∞
. ∫ cos ( xy ).ϕ ( y ).dy
0
2
formüllerine ait
2
ϕ ( y) =
π
∞
. ∫ sin ( xy ). f ( x).dx
ve
ϕ ( y) =
0
2
π
∞
. ∫ cos ( xy ). f ( x).dx
0
denklemlerini vermiştir. 1823 yılında ise ABEL mekanik problemlerinin genel
formülü;
α
f ( x) = ∫
ϕ ( y)
( x − y)2
0
dy
,
f (0) = 0
ve
0 < α < 1
olan bu integral denklemini formüle edip 1826 yılında çözümünü vermiştir. Bu
denklemin α = 0
ve α =
1
2
hali ABEL’ in karşılaştığı orijinal denklem olup
buna ilişkin meşhur toutochrone(eşit zamanlı) problemi ise ilk olarak HUYGENS
tarafından çözülmüştür . İntegral sınırlarından biri x
gibi bir değişken olan ve
bilinmeyen ϕ fonksiyonunu integralin hem içinde hem dışında bulunduran
x
ϕ ( x) = f ( x) + λ ∫ K ( x, y ).ϕ ( y ). dy
a
integral denklemi ilk olarak Poisson tarafından elde edilmiştir. Burada ϕ çözümü
λ ’nın kuvvetleri cinsinden verilmiştir. Ancak ilgili serinin yakınsaklığı Poisson
tarafından gösterilmeyip daha sonra 1830 yılında Liouville tarafından ispatlanmıştır.
Bir S yüzeyi içerisinde ΔF = 0 Laplace denklemini sağlayan ve S’ nin sınırında
belli bir değer alan F
fonksiyonunun bulunması problemi olan Dirichlet
probleminin bir integral denklem problemine eşdeğer olduğu 1870 yılında Liouville
tarafından λ parametresinin bir açılımı olarak verilmiştir. Bu çözüm daha önceden
Poisson ve Liouville’ in kullandığı ardışık yaklaştırma metoduna karşılık gelir.
İntegral sınırlarından birinin x değişkeni olduğu lineer integral denklemlere ait
çalışmalar 1860 – 1940 yılları arasında yaşamış olan İtalyan matematikçi Vita
VOLTERRA tarafından yayınlanmıştır.
3
b
ϕ ( x) = f ( x) + λ ∫ K ( x, y ).ϕ ( y ). dy
a
integral denklemi ilk olarak 1900 yılında Eric İvan FREDHOLM ( 1866 – 1927 )
tarafından araştırılmış. Fredholm ise Volterra’ nın 1884’ te sunmuş olduğuna benzer
yaklaşım problemlerini ele alıp 1903’ te makalesini yayınlamıştır[1].
Bu tezin ikinci bölümünde temel tanım ve kavramlardan bahsedilecektir. Üçüncü
bölümünde integral denklemlerin sınıflandırılması yer almaktadır. Dördüncü
bölümde analitik çözüm yöntemlerine yer verilmiş olup beşinci bölüm sayısal
yöntemleri içermektedir.
4
2. TEMEL TANIMLAR VE TEOREMLER
2.1. Weirstrass M-Testi
{ fn }
{M n }
, E kümesi üzerinde tanımlanmış bir reel fonksiyon dizisi ve
reel sayı
dizisi olsun. ∀ x ∈ E ve n ∈` için
f n ( x) ≤ M n
oluyorsa ve
∞
∑ M n serisi yakınsak ise
n =1
∞
∑f
n =1
n
( x) serisi
E üzerinde düzgün ve
mutlak yakınsaktır.
2.2. Süreklilik
f : [ a, b ] → \
tanımlı olsun. ∀ ε > 0 için
x − x0 < δ iken
∃δ (ε , x0 ) var ve
∀ x ∈[ a, b ]
için
f ( x) − f ( x0 ) < ε ise f fonksiyonuna x0 noktasında süreklidir
denir.
2.3. Düzgün Süreklilik
f , [ a, b ] aralığında tanımlanmış reel değerli bir fonksiyon olsun. ∀ x, y ∈[ a, b ] ve
∀ ε > 0 verildiğinde,
x − y <δ
iken
f ( x) − f ( y ) < ε
olacak biçimde ∃δ = δ (ε ) > 0 bulunabilirse
f ’ ye
[ a, b ] ’ de düzgün süreklidir
denir. Dikkat edilirse düzgün süreklilik bir küme üzerinde tanımlanır.
5
2.4. Noktasal Yakınsaklık ve Düzgün Yakınsaklık
X boş olmayan bir küme ve f n : X → F , n ∈ ` şeklindeki fonksiyonlar olsun.
i ) Eğer
∀ x ∈ X için
f n ( x) → f ( x) oluyorsa yani ∀ x ∈ X
∃ N = N ( x, ε ) varsa ve ∀ n∈` için
ve ∀ ε > 0 için
f n ( x) − f ( x) < ε oluyorsa ( f n ) fonksiyonlar
dizisi f ‘ ye noktasal yakınsar denir.
ii ) ∀ ε > 0 için
∃ N = N (ε )
varsa
∀x ∈ X ve ∀ n ≥ N
için
f n ( x) − f ( x) < ε
oluyorsa ( f n ) fonksiyonlar dizisi f ‘ ye düzgün yakınsar denir.
2.5. Vektör Uzayı
L boş olmayan bir küme, K reel yada kompleks sayılar cismi olsun. Aşağıdaki
şartları sağlayan L kümesine K cismi üzerinde vektör uzayı (Lineer uzay) denir
ve bu uzayın elemanlarına da vektör denir.
+ : L× L → L
•: K× L → L
işlemleri tanımlıdır.
a) ( L , +) değişmeli bir gruptur.
G1) Her x, y ∈ L için x + y ∈ L dir. (Kapalılık özelliği)
G 2) Her x, y, z ∈ L için x + ( y + z ) = ( x + y ) + z (Birleşme özelliği)
G3) Her
x ∈ L için
x + θ = θ + x = x olacak şekilde θ ∈ L vardır. (Birim
eleman özelliği)
G 4) Her
x ∈ L için x + (− x) = (− x) + x olacak şekilde − x ∈ L vardır.(Ters
eleman özelliği)
G5) Her x, y ∈ L için x + y = y + x dir. (Değişme özelliği)
b ) x, y ∈ L
ve α , β ∈ K olmak üzere aşağıdaki şartlar sağlanır.
6
L1) α .x ∈ L
L 2) α .( x + y ) = α .x + α . y
L3) (α + β ). x = α .x + β .x
L 4) ( α . β ) . x = α . β . x
L5) 1K . x = x
(Burada 1K , K ’ nın birim elemanıdır)
2.6. Lineer Bağımlılık ve Lineer Bağımsızlık
L , K cismi üzerinde bir vektör uzayı ve M = { x1 , x2 ,........, xn } de L ’ nin sonlu bir
alt kümesi olsun. α i ∈ K olmak üzere
n
∑ α .x = 0
i =1
i
i
olması her i için
αi = 0
olmasını gerektiriyorsa x1 , x2 ,......, xn vektörlerine lineer bağımsız denir. Herhangi
bir α i ≠ 0 ise o halde de x1 , x2 ,......, xn vektörlerine lineer bağımlı vektörler denir.
2.7. Normlu Uzay
V bir vektör uzayı olsun. ∀v, w∈V ve k ∈ \ olmak üzere
i)
v ≥ 0 ve
v = 0 ⇔ v =0
ii ) k .v = k . v
iii ) v + w ≤ v + w
koşulları sağlanıyorsa
. :V → \
fonksiyonuna V üzerinde norm, ( V , . ) ikilisine de normlu uzay denir.
7
2.8. Leibnitz Formülü
a( x) ve b( x) integralin sınırları olmak üzere, integral altında türev alma işlemi
uygulanır.
b( x)
d
dx
∫
b( x)
F ( x, t ). dt =
a( x)
db
da
∂F ( x, t )
dt + F { x , b( x)} − F { x, a( x)}
dx
dx
∂x
a( x)
∫
Burada a( x) ve b( x) sabitler ise
b
da
db
=0 ,
= 0 olacağından
dx
dx
b
d
∂F ( x, t )
F ( x, t ). dt = ∫
. dt
∫
dx a
∂x
a
olarak kullanılır.
2.9. Hölder Eşitsizliği
Sonlu sayıda, hepsi sıfır olmayan ai , bi , i =1, 2,...., n pozitif sayılarını alalım.
1 1
+ = 1 koşulunu sağlasın.
p q
p, q < 1 sayıları
1
1
⎛ n
⎞p ⎛ n
⎞q
ai bi ≤ ⎜ ∑ ai p ⎟ + ⎜ ∑ bi q ⎟
∑
i =1
⎝ i =1
⎠
⎝ i =1 ⎠
n
eşitsizliğine Hölder eşitsizliği denir [2,3].
8
3. İNTEGRAL DENKLEMLERİNİN TİPLERİ VE SINIFLANDIRMASI
Tek değişkenli fonksiyonlarda bir integral denklemin en genel hali,
b
ψ ( x).φ ( x) = f ( x) + λ . ∫ K ( x, t ).φ (t ). dt
(3.1)
a
şeklinde olup burada a ve b sabitler ; λ bir parametre , ψ ( x) , f ( x) , K ( x, t ); tanım
bölgesi
a ≤ x , t ≤ b üzerinde bilinen fonksiyonlar ; φ ( x)
ise bilinmeyen
fonksiyondur. K ( x, t ) fonksiyonuna da çekirdek adı verilir. İntegral denklemlerin
farklı sınıflandırılmaları mevcuttur ve bu sınıflandırmalar sırasıyla bu bölümde
incelenecektir.
3.1. Lineer ve Lineer Olmayan İntegral Denklemler
İntegral denklemleri lineer ve lineer olmayan integral denklemler olmak üzere iki
farklı sınıfa ayırabiliriz. φ ( x) bilinmeyen fonksiyon olmak üzere,
b
φ ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.2)
a
φ ( x) bilinmeyen fonksiyonu lineer olduğundan
şeklindeki integral denklemde
Eş.3.2 ’deki integral denklem de lineerdir. Eğer
b
φ ( x) = f ( x) + ∫ K ( x, t ).φ n (t ). dt
n ≠1
,
(3.3)
a
ise bu integral denklemde
φ ( x) bilinmeyen fonksiyonunun
n. kuvveti
bulunduğundan lineer olmayan integral denklem sınıfındadır [1].
3.2. Singüler İntegral Denklemler
Singüler integral denklemler kendi içinde 3 farklı çeşit olarak verilir.
i)
İntegral sınırlarından biri yada her ikisinin de sonsuz olduğu integral denklemler
ii ) Çekirdek fonksiyonunun verilen aralıkta süreksiz olduğu integral denklemler
iii ) Bazı sonlu mertebeden türevlerin oluşturulamadığı integral denklemler
9
⎛
⎜ Örneğin ;
⎝
1
y ( s ) = (1 − s 2 ) 2
sınırlar sürekliliği bozar
,
[ −1,1]
aralığında singülerdir. Çünkü
y′( s) ’ de
)
olup sırasıyla 1.çeşit, 2.çeşit, 3.çeşit singüler integral denklemler diye ifade edilir.
Singüler integral denklemler oldukça geniş kapsamlı bir konu olup ayrı bir inceleme
alanı gerektirdiğinden bu tezin 4.bölümünde sadece 2.çeşit singüler integral
denklemlerin özel bir durumuna yer verilmiştir.
İkinci çeşit integral denklemlere örnek olarak ; 0 < α <1 olmak üzere
x
u (t ). dt
∫ ( x − t )α
f ( x) =
(3.4)
0
integral denklemi verilebilir. x = t için integral denklem süreksizdir. Ayrıca
aşağıdaki integral denklemler de 1.çeşit singüler integral denklem sınıfındadırlar.
∞
f ( x) = ∫ sin ( xt ) u (t ). dt
(Fourier Sinüs Transformasyonu)
0
∞
f ( x) = ∫ e − xt u (t ). dt
(Laplace Transformasyonu)
0
3.3. Singüler Olmayan İntegral Denklemlerinin Tiplerine Göre Sınıflandırılması
b
u ( x) = ∫ K ( x, t ).φ (t ). dt
(3.5)
a
b
u ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.6)
a
burada φ ( x) bilinmeyen fonksiyon , u ( x), f ( x) , K ( x, t ) bilinen fonksiyonlar olmak
üzere Eş. 3.5 ve Eş. 3.6’ daki integral denklemler 1.Tip integral denklemlerdir.
Burada bilinmeyen fonksiyon sadece integral içindedir.
10
b
φ ( x) = ∫ K ( x, t ).φ (t ). dt
(3.7)
a
b
φ ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.8)
a
burada φ ( x) bilinmeyen fonksiyon ; f ( x) ve K ( x, t ) bilinen fonksiyonlar olmak
üzere Eş. 3.7 ve Eş. 3.8’ deki integral denklemler 2.Tip integral denklemlerdir.
Burada bilinmeyen fonksiyon integralin hem içinde hem de dışındadır.
b
ψ ( x).φ ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.9)
a
burada ψ ( x) , f ( x) ve K ( x, t ) bilinen fonksiyonlar, φ ( x) bilinmeyen fonksiyon
olmak üzere Eş. 3.9’ daki integral denklem de 3.Tip integral denklemdir. Eş. 3.9’ da
integral dışındaki bilinmeyen fonksiyonun katsayısına göre integral denklem
1. ve 2. tip integral denkleme dönüştürülebilir.
3.4. Homogen ve Homogen Olmayan İntegral Denklemler
Bir integral denkleminde integralin dışında ve bilinmeyen φ fonksiyonu haricinde f
gibi bir fonksiyon bulundurmayan integral denklemlere homogen integral denklem
denir. f fonksiyonu bulunduran integral denklemlere homogen olmayan integral
denklem denir.
b
φ ( x) = ∫ K ( x, t ).φ (t ). dt
(3.10)
a
b
φ ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.11)
a
Eş. 3.10 homogen integral denklem, Eş. 3.11 ise homogen olmayan integral
denkleme birer örnektir.
3.5. Volterra ve Fredholm İntegral Denklemler
İntegral denklemler integral sınırlarının değişken ya da sabit olmasına göre de
sınıflandırılırlar.
11
t > x için K ( x, t ) = 0 şartını sağlayan
x
f ( x) = ∫ K ( x, t ).φ (t ). dt
(3.12)
a
x
φ ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.13)
a
x
ψ ( x).φ ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.14)
a
denklemleri sırasıyla 1. , 2. ve 3. tip Volterra integral denklemleridir.
a , b ∈ \ , f :[ a , b ] → \
b
∫
ve K :[ a, b ] × [ a, b ] → \
2
f ( x) . dx < ∞
a
b b
∫ ∫ K ( x, t )
2
.dx . dt < ∞
a a
özelliklerine sahip bilinen fonksiyonlar ve φ :[ a, b ] → \ bilinmeyen fonksiyon olmak
üzere;
b
f ( x) = ∫ K ( x, t ).φ (t ). dt
(3.15)
a
b
φ ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.16)
a
b
ψ ( x).φ ( x) = f ( x) + ∫ K ( x, t ).φ (t ). dt
(3.17)
a
denklemleri sırasıyla 1. , 2. ve 3.tip Fredholm integral denklemleridir.
3.6. Abel İntegral Denklemi
Eş. 3.12’ nin özel bir hali Abel integral denklemidir. Eş. 3.12’ de
K (t , s ) =
H (t , s )
(t p − s p )α
(3.18)
12
olarak alınmıştır.
t
∫ (t
0
H (t , s )
x( s ) = y (t )
p
− s p )α
burada 0 < α <1
,
,
t>0
p>0
ve
(3.19)
p∈ ]
şeklindedir. Özellikle önemli durumlar
p = 1 ve p = 2 durumlarıdır. Her iki durumda da α =
1
’ dir. H (t , s ) fonksiyonu
2
düzgün yakınsak olarak varsayılmıştır ( bu ifade aynı zamanda çoğunlukla sürekli
integrallenebilirdir). Bu integral denklemlerin uygulama alanı çok geniş olup analitik
yöntemler çoğu zaman yetersiz kalmaktadır. Bu nedenle özel sayısal metotlar
geliştirilmiştir.
3.7. Wiener – Hopf İntegral Denklemi
Bu integral denklem,
∞
λ . x(t ) − ∫ K (t − s ) x( s) ds = y (t ) , 0 ≤ t ≤ ∞
(3.20)
0
şeklindedir. Orijinal olarak bu gibi integral denklemler ısı transfer denklemlerinde,
düzlemsel problemlerin sadece düzgün yakınsak olduğu durumlar için sınır değer
problemlerinin çözülmesinde kullanılır.
3.8. Cauchy Tekil İntegral Denklemi
Γ açık veya kapalı sınırlı bir bölge olsun. Kompleks düzlemde Cauchy tekil integral
denklemi,
a( z ).φ ( z ) +
b( z ) φ (ζ )
dζ + ∫ K ( z , ζ ) dζ =ψ ( z ) , z ∈Γ
π . i ∫Γ ζ − z
Γ
(3.21)
13
olup
a, b,ψ
K verilmiş kompleks değerli fonksiyonlardır. φ bilinmeyen
ve
fonksiyon, K integrallenebilir olarak Fredholm integral operatörü ile yakından
ilişkilidir. Ayrıca bu integral denklem esas (öncül) değer denklemi olarak
adlandırılır.
3.9. İntegro-Diferansiyel Denklemler
Bilinmeyen φ ( x) fonksiyonunun türevlerinin de bulunduğu integral denklemlere
integro-diferansiyel denklemler denir.
⎧
x
⎩
0
⎫
φ ′( x) = F ⎨ x, u ( x) , ∫ K ( x, t , φ (t ), φ ′(t )).dt ⎬
(3.22)
⎭
denklemi bu tip integral denklemlerdir. İçinde hem bilinmeyen hem de bilinmeyenin
türevleri bulunmaktadır.
3.10. Parametreli İntegral Denklemler
λ ≠ 0 ve λ ≠ 1
denklemler
olan bir parametre olmak üzere tanımı yapılmış olan integral
λ
parametresinin dahil edilmesi ile daha genel bir yapıya
kavuşacaktırlar. Burada λ kompleks veya reel değerli olabilir. Örneğin;
x
φ ( x) = f ( x) + λ ∫ K ( x, t ) φ (t ) dt
( 2.tip Volterra İntegral denklemi )
a
b
φ ( x) = f ( x) + λ . ∫ K ( x, t ) φ (t ) dt
a
şeklindedir.
( 2.tip Fredholm İntegral denklemi )
14
3.11. Fox İntegral Denklemi
Bu integral denklem;
∞
φ ( x) = f ( x) + ∫ K ( xy ) φ ( y ) dy
( 0 < x < ∞)
(3.23)
a
şeklindedir. Bu integral denklemin çekirdeği özel olarak iki değişkenin çarpımı
olarak seçilir yani xy ’ yi değişken kabul eder ve sınırlarına da dikkat edilirse 1.çeşit
singüler integral denklem sınıfındadır.
3.12. Konvolisyon İntegral Denklem
K ( x, y ) çekirdeği sadece
x − y farkına bağlı yani x − y ‘ yi değişken kabul eden
bir değişkenli fonksiyon olmak üzere genel bir konvolisyon integral denklemi,
φ ( x) = f ( x) +
∞
∫ K ( x − y) φ ( y) dy
(3.24)
−∞
şeklinde olup hemen hemen konvolisyon integral denklemi ise,
φ ( x ) = f ( x) +
∞
∫ K ( x, x − y) φ ( y) dy
(3.25)
−∞
formundadır.
3.13. İntegral Denklemlerle Diferansiyel Denklemler Arasındaki İlişki
Başlangıç koşulu ile verilen değişken veya sabit katsayılı bir diferansiyel denklem
Volterra tipinde bir integral denkleme dönüştürülebilir. Dolayısıyla bir integral
denklemde bir diferansiyel denkleme dönüşebilir.
15
3.13.1. Diferansiyel denklemlerin integral denkleme dönüştürülmesi
y (0) = c0
,
y′(0) = c1 ,............,
y ( n −1) (0) = cn −1 başlangıç koşulları ile verilen
d (n) y
d ( n −1) y
d ( n − 2) y
dy
+
(
).
+
(
).
+ ........ + an −1 ( x). + an ( x). y = f ( x)
a
x
a
x
1
2
(n)
( n −1)
( n − 2)
dx
dx
dx
dx
(3.26)
n. mertebeden lineer diferansiyel denklemi verilsin. Bu denklem integral denkleme
dönüştürülebilir.
d (n) y
= u ( x)
dx ( n )
d ⎛ d ( n −1) y ⎞
∫0 dx ⎜⎝ dx(n−1) ⎟⎠ .dx = ∫0 u ( x). dx
x
x
d ( n −1) y
= u ( x). dx + cn −1
dx ( n −1) ∫0
x
olur. Benzer şekilde;
x x
⎛
⎞
d ⎛ d ( n − 2) y ⎞
dx
u
x
dx
c
dx
.
(
).
=
+
⎜
⎟
⎜
⎟
n
−
1
∫0 dx ⎝ dx( n−2) ⎠ ∫0 ⎝ ∫0
⎠
x
d ( n − 2) y
= u ( x) dx dx + (cn −1 ). x + cn − 2
dx ( n − 2) ∫0 ∫0
x x
d ( n −3) y
1
= ∫ ∫ ∫ u ( x) dx dx dx + (cn −1 ). x 2 + (cn − 2 ). x + cn −3
( n − 3)
2!
dx
0 0 0
x x x
.
.
.
x
x
dy
1
1
(cn −1 ) x n − 2 +
(cn − 2 ) x n −3 + ... + c2 x + c1
= ∫ .....(n − 1).....∫ u ( x) dx....dx +
(n − 2)!
(n − 3)!
dx 0
0
16
x
x
0
0
y = ∫ .....(n).....∫ u ( x) dx........dx +
1
1
(cn −1 ) x n −1 +
(cn − 2 ) x n − 2 + ...... + c1 x + c0
(n − 1)!
(n − 2)!
elde edilir. Eş. 3.26’ da yerine yazılırsa
x
u ( x) + a1 ( x) ∫ u ( x) dx + a1 ( x) cn −1 + a2 ( x)
0
x x x
+ a3 ( x)
1
∫ ∫ ∫ u( x) dxdxdx + 2! c
n −1
x x
∫ ∫ u( x) dxdx + a ( x) c
2
n −1
x + a2 ( x) cn − 2
0 0
x 2 a3 ( x) + cn − 2 x a3 ( x)
0 0 0
x
x
0
0
+ cn −3 a3 ( x) + .......... + an −1 ( x) ∫ ........(n − 1)........∫ u ( x) dxdx.......dx
+
1
cn −1 x n − 2 an −1 ( x) + ........... + c2 x an −1 ( x) + c1 an −1 ( x)
(n − 2)!
x
x
0
0
+ an ( x) ∫ .........(n).......∫ u ( x) dxdx.........dx
+
1
cn −1 x n −1 an ( x) + ........ + c1 x an ( x) + c0 an ( x) = f ( x)
(n − 1)!
olur. Düzenleyip tekrardan yazarsak,
x
u ( x) + a1 ( x) ∫ u ( x) dx + a2 ( x)
0
x x
x x x
∫ ∫ u( x) dxdx + a ( x) ∫ ∫ ∫ u ( x) dxdxdx + ........
3
0 0
0 0 0
x
x
x
x
0
0
0
0
.... + an −1 ( x) ∫ ......(n − 1)......∫ u ( x) dxdx....dx + an ( x) ∫ ......( n).....∫ u ( x) dxdx......dx
= f ( x) − cn −1 a1 ( x) − cn −1 x a2 ( x) −
1
1
cn −1 x 2 a3 ( x) − ............. −
cn −1 x n −1 an −1 ( x)
2!
(n − 1)!
− a2 ( x) cn − 2 − cn − 2 x a3 ( x) − ........... −
1
cn − 2 x n − 2 an − 2 ( x) − .............................
(n − 2)!
............ − c1 x an ( x) − c0 an ( x)
Eşitliğin sağ tarafı x ’ in bir fonksiyonu olduğundan F ( x) ile gösterelim. F ( x) ’ in
değerini de düzenleyerek yazabiliriz.
17
a1 ( x) + x . a2 ( x) +
x2
x n −1
a3 ( x) + ....... +
an ( x) = f n −1 ( x)
2!
(n − 1)!
a2 ( x) + x . a3 ( x) + ....... +
xn−2
an ( x) = f n − 2 ( x)
(n − 2)!
.
.
.
an −1 ( x) + x . an ( x) = f1 ( x)
an ( x) = f 0 ( x)
F ( x) = f ( x) − { cn −1 f n −1 ( x) + cn − 2 f n − 2 ( x) + ........ + c1 f1 ( x) + c0 . f 0 ( x)
}
şeklinde yazılabilir. Eşitliğin sol yanını
x
x
x
∫ .......(n)tane.......∫ u (t ).dtdt.......dt =
0
∫
0
0
( x − t ) n −1
u (t ).dt
(n − 1)!
(3.27)
bağıntısını kullanarak tek katlı integral olarak yazmaya çalışalım.
x
x
x
0
0
0
u ( x) + a1 ( x). ∫ u ( x). dx + ..... + an ( x). ∫ ......(n)tane.....∫ u ( x) dxdx.....dx = F ( x)
(3.28)
Eş. 3.27 yardımıyla
x
x
0
0
( x − t ) n −1
u (t ) dt = F ( x)
(
1)!
−
n
0
x
u ( x) + a1 ( x). ∫ u (t ).dt + a2 ( x). ∫ ( x − t ). u (t ). dt + ....... + an ( x). ∫
şeklinde ifade edilir. Belirli integralden
x
⎡
( x − t )2
( x − t ) n −1 ⎤
+ ......... + an ( x).
u ( x) + ∫ ⎢ a1 ( x) + a2 ( x)( x − t ) + a3 ( x).
u (t ) dt = F ( x)
2!
(n − 1)! ⎥⎦
0 ⎣
18
olup
K ( x, t ) = a1 ( x) + a2 ( x) ( x − t ) + a3 ( x)
( x − t )2
( x − t ) n −1
+ ........ + an ( x).
2!
(n − 1)!
ifadesi çekirdek fonksiyonu olarak ifade edilir. Bulduklarımızı yerine yazarsak
x
u ( x) + ∫ K ( x, t ). u (t ) dt = F ( x)
0
elde edilir. Bu da 2.tip Volterra integral denklemidir. Dolayısıyla başlangıç
koşullarıyla verilen bir diferansiyel denklemi integral denkleme dönüştürebildik.
Eş.3.27’de verilen
x
x
0
0
∫ .......(n).......∫ u (t ).dtdt.......dt =
x
∫
0
( x − t ) n −1
u (t ).dt
(n − 1)!
eşitlik aşağıdaki şekilde ispatlanır. Eş. 3.27 aşağıdaki gibi düzenlenip, sağ tarafı I n
ile gösterilsin ve bu ifade daha genel incelenmiş olması için alt sınır da a
olarak
alınsın.
x
x
x
a
a
a
(n − 1)! ∫ ........(n).......∫ u (t ) dt.......dt = ∫ ( x − t ) n −1 u (t ) dt
x
I n ( x) = ∫ ( x − t ) n −1. u (t ).dt
(3.29)
a
burada n pozitif bir tamsayı ve a bir sabittir. İntegral işareti altında türev almaya
yarayan Leibnitz Formülünden yararlanılarak;
F ( x, t ) = ( x − t ) n −1 . u (t )
19
alınırsa, türev alındığında,
x
dI n
= (n − 1) ∫ ( x − t ) n − 2 u (t ) dt + {( x − t ) n −1 u (t )}
dx
a
t=x
bulunur. Böylece n > 1 için,
dI n
= (n − 1) I n −1
dx
(3.30)
olur. Özel olarak,
x
dI1 d
u (t ) dt = u ( x)
=
dx dx ∫a
(3.31)
alalım. Eş. 3.30’ dan türev almaya devam edilirse,
⎫
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
.
⎪
⎬
k
d In
= (n − 1) (n − 2).......( n − k ) I n − k , ( n > k ) ⎪
k
⎪
dx
⎪
.
⎪
⎪
.
⎪
.
⎪
n −1
⎪
d In
⎪
=
−
−
=
−
n
n
I
n
I
(
1)
(
2).......2.1.
(
1)!
1
1
dx n −1
⎭
d 2 In
= (n − 1) (n − 2) I n − 2
dx 2
d 3 In
= (n − 1) (n − 2) (n − 3) I n −3
dx 3
.
.
ve n. mertebeden türev için
(3.32)
20
d n In
dI
= (n − 1)! 1 = (n − 1)! u ( x)
n
dx
dx
I n (a ) = 0 olduğuna dikkat edilirse, Eş. 3.32’ den, I n ( x) ’ in
bulunur. n ≥ 1 iken
ve onun ilk (n − 1) adet türevinin x = a için sağladığı sonucuna varılabilir. Şimdi,
yukarıdaki bağıntılardan geriye doğru hareket edilerek, integral işlemleri yapılırsa
Eş. 3.31’ den
x
I1 ( x) = ∫ u ( x) dx
a
elde edilir. Buradan
x
x x2
a
a a
I 2 ( x) = ∫ I 2 ( x2 ) dx2 = ∫ ∫ u ( x1 ) dx1 dx2
yazılabilecektir. Burada
x1 , x2
birer parametredir. İşlemlere bu şekilde devam
edilirse,
x xn xn−1
x3 x2
a a
a a
I n ( x) = (n − 1)! ∫ ∫
∫ ........∫ ∫ u ( x ) dx dx
1
a
1
2
dx3 ....... dxn −1dxn
bulunur. İfadeyi düzenlemek için, her iki tarafı (n − 1)! bölüp, I n yerine Eş. 3.29’
daki eşiti yazılırsa,
x xn xn−1
∫∫ ∫
a a
a
x3 x2
........∫ ∫ u ( x1 ) dx1dx2 dx3 .........dxn −1dxn =
a a
x
1
( x − t ) n −1 u (t ) dt
∫
(n − 1)! a
ve burada x = x1 = x2 = ....... = xn −1 = xn kabul edilirse, gösterilmek istenilen,
21
x
x
0
0
( x − t ) n −1
u (t ) dt
(n − 1)!
0
x
∫ ........(n)tane.......∫ u (t )dt........dt = ∫
bağıntısı elde edilmiş olur. Böylece ispatı tamamlamış olduk.
Örnek : y′′ + y = 0 ; y (0) = 0 , y′(0) =1 başlangıç koşulları ile verilen diferansiyel
denkleme karşılık gelen integral denklemini bulalım.
d2y
y′′ = 2 = u ( x) olarak tanımlanırsa;
dx
x
x
0
0
x
x
0
0
∫ y′′( x) dx = ∫ u ( x) dx
∫ y′′( x)dx = ∫ u( x)dx
x
x
0
0
y′( x) = ∫ u ( x) ⇒ y′( x) = 1 + ∫ u ( x)dx
tekrar integral alırsak
x x
y (t ) 0 = x + ∫ ∫ u (t )dtdt
x
0 0
x
y ( x) = x + ∫ ( x − t )u (t )dt
0
bulunur. Bulduklarımızı yerine yazarsak;
x
u ( x) + x + ∫ ( x − t )u (t )dt = 0
0
şeklindeki integral denkleme dönüşür.
22
3.13.2. İntegral denklemin diferansiyel denkleme dönüştürülmesi
Şimdi de bir integral denklemin bir diferansiyel denkleme dönüştürülmesini görelim.
Bunun için Leibnitz formülünün uygulanması yeterlidir.
x
Örnek : u ( x) = λ ∫ sin(t ) u (t )dt + x
integral denklemini diferansiyel denkleme
0
dönüştürelim.
Her iki tarafın x ’e bağlı türevini alalım. Burada F ( x, t ) = sin(t ) u (t ) ’ dir. O halde
türev alınırsa;
x
du ( x)
d
− λ ∫ sin(t ) u (t )dt = 1
dx
dx 0
elde edilir. Leibnitz formülüne göre
x
x
d
sin(t ) u (t )dt = ∫ 0dt + u ( x) sin x = u ( x) sin x
dx ∫0
0
şeklinde yazabiliriz. Bulduğumuz eşitlikleri yerine yazarsak,
u ′ − λu.sin x = 1
elde edilir.
Örnek :
x
u ( x) − ∫ u (t ) tan tdt = sin x
0
dönüştürelim.
Her iki tarafın x ’ e göre türevi alınırsa,
integral denklemini diferansiyel denkleme
23
du ( x) d x
d (sin x)
− ∫ u (t ) tan(t )dt =
0
dx
dx
dx
u′( x) −
d x
u (t ) tan(t )dt = cos x
dx ∫0
elde edilir. Bu ifadeye Leibnitz Formülü uygulandığında,
x
d x
u (t ) tan(t )dt = ∫ 0dt + u ( x) tan x = u ( x) tan x
∫
0
dx 0
şeklindedir. Bulduğumuz bu değeri yukarıda yerine yazarsak,
u ′( x) − u ( x) tan x = cos x
şeklindedir. Buradan da görüldüğü gibi bir integral denklemi diferansiyel denkleme
dönüştürebiliriz.
24
4. İNTEGRAL DENKLEMLER İÇİN ANALİTİK ÇÖZÜM YÖNTEMLERİ
4.1. Fredholm İntegral Denklemlerinin Çözüm Yöntemleri
Bu bölümde Fredholm integral denklemlerine ait çözüm yöntemleri verilmiş olup
ardından bu yöntemlerin uygulanabilirliği örneklerle gösterilmiştir.
4.1.1. Sabit çekirdekli integral denklemler
Bir Fredholm integral denkleminde bilinen K ( x, t ) fonksiyonunun sabit bir
fonksiyon olduğunu kabul edelim. “c” bu sabiti göstermek üzere,
K ( x, t ) = c
için integral denklemi
b
φ ( x) = f ( x) + λ ∫ cφ (t )dt
a
şeklinde olur. Biraz daha düzenlersek,
b
φ ( x) = f ( x) + λ c ∫ φ (t )dt
a
yazılır ve λ.c = μ alınmak üzere
b
φ ( x) = f ( x) + μ ∫ φ (t )dt
a
olarak yazılabilir. Belirli integralin sınırları sabit olduğundan bu integralin sonlu bir
değeri olacaktır. Bu sonlu değeri A ile gösterirsek;
25
b
A = ∫ φ (t )dt
a
olup bu denklem φ ( x) = f ( x) + μ A şeklini alır. Bu çözüm integral denklemini
sağlaması gerekir. O halde
b
f ( x) + μ A = f ( x) + μ ∫ { f (t ) + μ A} dt
a
olur. Buradan gerekli sadeleştirmeler yapılırsa,
b
b
a
a
A = ∫ f (t )dt + μ ∫ Adt
b
⎡
⎤ b
A ⎢1 − μ ∫ dt ⎥ = ∫ f (t )dt
a
⎣
⎦ a
veya
b
A=
1
f (t )dt
1 − μ (b − a ) ∫a
bulunur. Buradan A ’nın anlamlı olması için 1 − μ (b − a) ≠ 0 olmalıdır. Diğer
taraftan f ( x) fonksiyonu verilmiş olduğundan integralin değeri de bilinmektedir. A
için bulunan değer φ ( x) = f ( x) + μ A denkleminde yerine koyulursa,
⎡
b
⎤
1
f (t )dt ⎥
∫
⎣1 − μ (b − a) a
⎦
φ ( x) = f ( x) + μ ⎢
= f ( x) +
μ
b
1 − μ (b − a) ∫a
f (t )dt
olarak bulunur. μ = λ c değeri de yerine yazılırsa
26
φ ( x) = f ( x) +
λc
b
1 − λ c(b − a) ∫a
f (t )dt
sonucuna varılır. Görüldüğü gibi ikinci tarafta hep bilinen değerler olup u ( x) değeri
doğrudan bulunabilecektir. Bu yöntem sadece Fredholm integral denkleminde
kullanılır [3].
1
Örnek : φ ( x) = 2 x + λ ∫ 5φ (t )dt
2
sabit çekirdekli integral denkleminin çözümünü
0
bulalım.
1
A = ∫ φ (t )dt olarak alınırsa φ ( x) = 2 x 2 + 5λ A olur. Bu değeri denklemde yerine
0
koyarsak;
1
2 x 2 + 5λ A = 2 x 2 + 5λ ∫ (2t 2 + 5λ A)dt
0
ve gerekli işlemler yapılırsa
1
1
A = 2∫ t 2 dt + 5λ A∫ dt
0
0
⎛t
= 2⎜
⎜3
⎝
⎞
⎟ + 5λ A(1 − 0)
⎟
0⎠
3 1
A (1 − 5λ ) =
2
3
olup buradan
A=
2
3(1 − 5λ )
bulunur. Bu ifade φ ( x) = 2 x 2 + 5λ A ifadesinde yerine koyulursa
27
φ ( x) = 2 x 2 +
10λ
3(1 − 5λ )
çözümüne ulaşılır.
4.1.2. Dejenere çekirdekli integral denklemler
Bir integral denklemde K ( x, t ) çekirdeği;
K ( x, t ) = r ( x) s (t )
şeklinde ise bu çekirdeğe dejenere çekirdek denir. Bu şekilde bir çekirdek
fonksiyonuna sahip olan integral denklem;
b
φ ( x) = f ( x) + λ ∫ r ( x) s (t )φ (t )dt
a
yazılır ve bu denklemde r ( x) , t ’den bağımsız olduğu için
b
φ ( x) = f ( x) + λ r ( x) ∫ s(t )φ (t )dt
a
şeklinde düzenlenebilir. Dejenere çekirdekli integral denklemleri çözümünü sabit
çekirdekli integral denklemlerde olduğu gibi düşünürsek, A integralin sabit değeri
olmak üzere
b
A = ∫ s (t )φ (t )dt
a
alındığında
φ ( x) = f ( x) + λ Ar ( x)
28
şeklini yazılabilir. Bulunan bu ifade çözümdür. Bu durumda;
b
f ( x) + λ Ar ( x) = f ( x) + λ r ( x) ∫ { f (t ) + λ Ar (t )} s (t )dt
a
olup gerekli sadeleştirme yapılırsa;
b
⎡
⎤ b
A ⎢1 − λ ∫ r (t ) s (t )dt ⎥ = ∫ f (t ) s (t )dt
a
⎣
⎦ a
b
ve
1 − λ ∫ r (t ) s(t )dt ≠ 0
a
olmak üzere
b
A=
∫ f (t )s(t )dt
a
b
1 − λ ∫ r (t ) s (t )dt
a
eşitliği bulunur. Bu eşitliğin sağ tarafındaki integraller f ( x), r ( x ) ve s ( x) bilinen
fonksiyonlar olduklarından hesaplanabilirler. Öyleyse A belirlenebilecektir. Bu
sonuç kullanılırsa u ( x) çözüm fonksiyonu;
b
φ ( x) = f ( x) +
λ ∫ f (t ) s (t )dt
a
b
r ( x)
1 − λ ∫ r (t ) s (t )dt
a
olarak bulunur. Bu sonuç dejenere çekirdekli Fredholm integral denkleminin çözüm
denklemidir.
1
Örnek : φ ( x) = x + ∫ e x −tφ (t )dt integral denklemini çözelim.
0
Verilen integral denklemde çekirdek fonksiyonu
29
K ( x, t ) = e x − t = e x e − t
şeklindedir. Böylelikle çekirdek fonksiyon dejenere çekirdek tipli olur. Burada
r ( x) s (t ) = e x e − t eşitliğinden dolayı r ( x) = e x ve s (t ) = e − t olarak belirlenir. Verilen
integral denklemde integral t ’ye göre alınacağından
1
φ ( x) = x + e x ∫ e− tφ (t )dt
0
1
şeklinde yazılır ve A = ∫ e − tφ (t )dt olarak alınırsa denklem
0
φ ( x) = x + Ae x
biçiminde yazılabilir. Bulunan bu ifadeyi denklemde yerine yazarsak
1
x + e x A = x + e x ∫ e − t {t + e − t A} dt
0
ifadesi elde edilir. Bu ifadeyi düzenlersek
1
1
A = ∫ te dt + A∫ e −2t dt
0
−t
0
olarak bulunur. Bulunan iki integrali ayrı ayrı çözersek
1
∫ te
−t
1
dt = (−t − 1)e− t = (−2)e − (−1) = 1 − 2e
0
0
1
1
1 −2t
1 −2
∫0 e dt = − 2 e 0 = − 2 (e − 1)
−2 t
30
elde edilir. O halde
1
A = 1 − 2e − A (e −2 − 1)
2
eşitliğinden A =
2e 2 (1 − 2e)
ifadesi bulunur. Bu değeri φ ( x) = x + Ae x ifadesinde
1 + e2
yerine yazarsak;
φ ( x) = x +
2e 2 (1 − 2e) x
e
1 + e2
çözümüne ulaşırız.
4.1.3. Dejenere çekirdekli 2.tip fredholm integral denklemlerinin çözümleri
için bir genel yöntem
b
φ ( x) = f ( x) + λ ∫ K ( x, t ) φ (t ) dt
(4.1)
a
şeklindeki 2.Tip Fredholm integral denklemini göz önüne alalım. K ( x, t ) çekirdeğini
parçalanabilir olarak kabul edersek çekirdek fonksiyonu;
n
K ( x, t ) = ∑ a j ( x) b j (t )
j =1
şeklinde alınabilir. Bu ifadeyi Eş. 4.1’ de yerine koyarsak,
n
b
j =1
a
φ ( x) = f ( x) + λ ∑ a j ( x) ∫ b j (t ) φ (t ) dt
ifadesi yazılabilir ve integralin sınırları sabit olduğundan integralin değerini c j gibi
bir sabitle gösterirsek,
n
φ ( x) = f ( x) + λ ∑ c j a j ( x)
j =1
(4.2)
31
elde edilir. Burada dikkat edilirse denklemde bulunan φ ( x) değeri, c j katsayıları
bilindiği takdirde, Eş.4.1’ in bir çözümünü vermektedir. İhtiyacımız olan c j
katsayılarını aşağıdaki şekilde hesaplayabiliriz [3]. Eş. 4.2’ yi bi ( x) ile çarpıp
integralini alırsak,
b
b
b
n
∫ φ ( x)b ( x)dx = ∫ f ( x)b ( x)dx + λ ∑ c ∫ a ( x)b ( x)dx
i
i
a
j =1
a
j
j
i
a
veya buna denk olarak
n
ci = f i + λ ∑ c j aij
j =1
elde edilir. Sonuç olarak
c1 , c2 , ..., cn
bilinmeyen değişkenlerine ve
n
ci = f i + λ ∑ c j aij , 1 ≤ i ≤ n
j =1
şeklindeki n tane denkleme sahip olan lineer sisteme sahip oluruz. Bulunan
değerlerin matris formu ise aşağıdaki şekilde yazılabilir.
JG JJG
( I − λ A)c = f
JJG JG
JJG
A , c ve f ifadelerinin açık şekli,
⎛ a11
⎜
⎜ .
JG
A = aij = ⎜ .
⎜
⎜ .
⎜a
⎝ n1
.
.
.
.
.
.
.
.
.
a1n ⎞
⎟
. ⎟
. ⎟ ,
⎟
. ⎟
ann ⎟⎠
⎛
⎜
JG ⎜
f =⎜
⎜
⎜
⎜
⎝
f1 ⎞
⎟
. ⎟
. ⎟
⎟
. ⎟
f n ⎟⎠
ve
⎛ c1 ⎞
⎜ ⎟
.
G ⎜ ⎟
c=⎜ . ⎟
⎜ ⎟
⎜ .⎟
⎜c ⎟
⎝ n⎠
32
Örnek :
f (t ) , [ −1,1] üzerinde sürekli bir fonksiyon olmak üzere,
1
x(t ) − λ ∫ (ts 2 + st 2 ) x( s)ds = f (t )
−1
integral denklemini çözelim.
Verilen integral denklemdeki çekirdek
a1 (t ) = t , b1 ( s ) = s 2 , a2 (t ) = t 2 ,
b2 ( s ) = s
şeklinde alınabilir burada; K (t , s ) = K ( s, t ) olduğundan simetrik çekirdeğe sahip bir
denklemdir.
b
b
aij = ∫ a j ( s ) bi ( s ) ds ve
fi = ∫ f ( s ) bi ( s )ds
a
a
formüllerini ele alıp aij ve fi ifadelerini hesaplayalım.
⎛ s4
a11 = ∫ a1 ( s )b1 ( s )ds = ∫ s.s ds = ∫ s ds = ⎜
⎜4
−1
−1
−1
⎝
1
1
1
2
3
⎞ 1 (−1) 4
⎟= −
=0
⎟ 4
4
−1 ⎠
1
a11 = 0
⎛ s5
a12 = ∫ a2 ( s )b1 ( s )ds = ∫ s s ds = ∫ s ds = ⎜
⎜5
−1
−1
−1
⎝
1
1
1
2 2
a12 =
4
⎞ 1 (−1)5 2
⎟ = −
=
⎟ 5
5
5
−1 ⎠
1
2
5
⎛ s 3 1 ⎞ 1 (−1)3 2
⎟= −
a21 = ∫ a1 ( s )b2 ( s )ds = ∫ ssds = ∫ s ds = ⎜
=
⎜ 3 −1 ⎟ 3
3
3
−1
−1
−1
⎝
⎠
1
1
1
2
a21 =
2
3
33
⎛ s4
a22 = ∫ a2 ( s )b2 ( s )ds = ∫ s sds = ∫ s ds = ⎜
⎜4
−1
−1
−1
⎝
1
1
1
2
⎞ 1 (−1) 4
⎟ = −
=0
⎟
4
4
−1 ⎠
1
3
a22 = 0
1
f1 =
∫
1
f ( s ) s 2 ds
ve
−1
f2 =
∫ f (s) s ds
−1
şeklinde elde edilir. Bulunan değerler aşağıdaki lineer denklem sisteminde yerine
yazılacaktır.
(1 − λ a11 )c1 − λ a12 c2 − ... − λ a1n cn = f1
−λ a21c1 + (1 − λ a22 )c2 − ... − λ a2 n = f 2
.
.
.
−λ an1c1 − λ an 2 c2 − ... + (1 − λ ann )cn = f n
Bu lineer denklem sisteminde problem, (c1 , c2 , ..., cn )
dönüşmüştür. Bu durumda
2
(1 − λ 0)c1 − λ c2 = f1
5
2
− λ c1 + (1 − λ 0)c2 = f 2
3
ifadesi elde edilir. İşlemler yapıldıktan sonra
c1 −
−
2λ
c2 = f1
5
2λ
c1 + c2 = f 2
3
değerlerinin bulunmasına
34
bulunur. Bu durumda determinant
Δ (λ ) = 1 −
4λ 2
15
bulunur.
ci =
Δi ( f )
Δ (λ )
ifadesinden
gerekmektedir. Yani λ ≠ ±
dolayı
Δ (λ )
değerinin
sıfır
olmaması
15
için oluşan sistemin her c = (c1 , c2 ) için tek bir
2
çözüm vardır.
c1 =
Δ1 ( f )
Δ (λ )
Δ2 ( f )
Δ (λ )
,
c2 =
ve
2
λ f1 + f 2
3
c2 =
4
1− λ2
15
ifadelerinden;
2
f1 + λ f 2
5
c1 =
4
1− λ 2
15
çözümü vardır. Diğer yandan integral denklemin çözümü;
n
x(t ) = f (t ) + λ ∑ c j a j (t ) ⇒ x(t ) = f (t ) + λ c1 a1 (t ) + λ c2 a2 (t )
j =1
şeklindedir. Bulunan ifadeleri yerine koyarak çözümü bulabiliriz. O halde
∀f ∈ C [ −1,1] için tek bir
x(t ) = f (t ) + c1λt + c2λt 2
çözümü vardır. Buradan,
35
2
2
f1 + λ f 2
λ f1 + f 2
5
x(t ) = f (t ) +
λt + 3
λt 2
4 2
4 2
1− λ
1− λ
15
15
çözümünü buluruz.
4.1.4. İtere çekirdek
Genel olarak integral denklemlerde K ( x, t ) ile gösterdiğimiz bir çekirdek fonksiyon
bulunmaktadır. Bu çekirdeğin; K 2 ( x, t ) , K3 ( x, t ) , ... , K n ( x, t ) ile gösterilen ve
sırasıyla 2. mertebeden, 3. mertebeden, … , n. mertebeden itere çekirdek denilen
değişik şekilleri de tanımlanır. İlk itere çekirdek verilen çekirdek fonksiyonuna eşit
olduğu kabul edilir. Yani,
K1 ( x, t ) = K ( x, t )
şeklindedir. 2. mertebeden bir itere çekirdek, z bir değişken olmak üzere,
b
b
a
a
K 2 ( x, t ) = ∫ K ( x, z ) K1 ( z , t )dz = ∫ K ( x, z ) K ( z , t )dz
yazılır. 3. mertebeden bir itere çekirdek ise;
b
K 3 ( x, t ) = ∫ K ( x, z1 ) K 2 ( z1 , t )dz1
a
⎡b
⎤
= ∫ K ( x, z1 ) ⎢ ∫ K ( z1 , z2 ) K ( z2 , t )dz2 ⎥ dz1
a
⎣a
⎦
b
b b
= ∫ ∫ K ( x, z1 ) K ( z1 , z2 ) K ( z2 , t )dz2 dz1
a a
36
şeklinde ifade etmek mümkündür. Burada göründüğü gibi itere çekirdekleri bulmak
için bir önceki itere çekirdeğin bilinmesi gerekmektedir. Bu hesaplamalar sonucunda
genel olarak n. mertebenden bir itere çekirdek;
b
b
a
a
K n ( x, t ) = ∫ ...(n − 1)...∫ K ( x, z1 ) K ( z1 , z2 )...K ( zn −1 , t )dzn −1...dz2 dz1
bağıntısı ile bulunabilir. İtere çekirdeğin bir başka ifadesi ise h ve k pozitif tamsayılar
olmak üzere;
b
K ( h + k ) ( x, t ) = ∫ K ( h ) ( x, z ) K ( k ) ( z , t )dz
a
veya
b
K ( h ) ( x, t ) = ∫ K ( k ) ( x, z ) K ( h − k ) ( z, t )dz
a
olarak verilir. Bu verilen tanım bir önceki tanıma uymaktadır. Burada K ( x, t )
çekirdeğin yeni değişkenler üretmek süreci ile parçalanabileceği ve böylece daha
yüksek mertebeden itere çekirdeklerin yazılabileceği anlaşılmaktadır. Yukarıda
dikkat edilirse yeni bulunan değişken sayısıyla itere çekirdekteki integral sayısı
birbirine eşittir. Yani ne kadar çok değişken olursa o kadar integral katı ortaya
çıkacaktır. Şimdi örnekler vererek itere çekirdek yöntemini inceleyebiliriz.
K ( x, t ) = xt
Örnek :
a = 0 ve b = 1 sınır değerleri için itere çekirdeklerini
bulalım.
K1 ( x, t ) = K ( x, t ) = xt dir.
b
K 2 ( x, t ) = ∫ K ( x, z ) K ( z, t )dz
a
1
1
0
0
= ∫ x z z t dz = x t ∫ z 2 dz =
xt
3
37
b
K 3 ( x, t ) = ∫ K ( x, z ) K 2 ( z, t )dz
a
1
1
zt xt
xt xt
= ∫ x z = ∫ z 2 dz = = 2
3 3 0
9 3
0
b
K 4 ( x, t ) = ∫ K ( x, z ) K 3 ( z , t )dz
a
1
1
zt
xt
xt
= ∫ x z dz = ∫ z 2 dz = 3
9
3 0
3
0
.
.
.
b
K n ( x, t ) = ∫ K ( x, z ) K n −1 ( z , t )dz
a
=
xt
3n −1
şeklinde tüm itere çekirdekleri bulunabilir.
K ( x, t ) = x − t a = 0 ve b = 1 çekirdek fonksiyonu için itere çekirdekleri
Örnek:
bulalım.
K1 ( x, t ) = K ( x, t ) = x − t olarak alırız. Yani 1. mertebeden itere çekirdek, çekirdek
fonksiyonu kendisidir.
b
K 2 ( x, t ) = ∫ K ( x, z ) K ( z , t )dz
a
1
= ∫ ( x − z )( z − t )dz
0
1
= ∫ ( xz − xt − z 2 + zt )dz
0
x
1 t
− xt − +
2
3 2
x+t
1
=
− xt −
2
3
=
38
b
K 3 ( x, t ) = ∫ K ( x, z ) K 2 ( z , t )dz
a
1
1⎞
⎛ z +t
= ∫ ( x − z) ⎜
− zt − ⎟ dz
3⎠
⎝ 2
0
1
3
⎡ ⎛ z +t ⎞
x
⎛ z +t ⎞ 2 z ⎤
= ∫ ⎢x ⎜
−
−
−
+
+
xzt
z
z
t
⎟
⎜
⎟
⎥ dz
2
3
2
3
⎝
⎠
⎝
⎠
⎣
⎦
0
1 x 1⎛1 t ⎞ t 1
x⎛1 ⎞
= ⎜ + t ⎟ − xt − − ⎜ + ⎟ + +
2⎝2 ⎠
2 3 2⎝3 2⎠ 3 6
x x
xt x 1 t t 1
= + t− − − − + +
4 2
2 3 6 4 3 6
t−x
=
12
b
K 4 ( x, t ) = ∫ K ( x, z ) K 3 ( z , t )dz
a
1
= ∫ ( x − z)
0
t−z
dz
2
1⎞
⎛ 1 ⎞⎛ x + t
= ⎜ − ⎟⎜
− xt − ⎟
3⎠
⎝ 12 ⎠ ⎝ 2
b
K 5 ( x, t ) = ∫ K ( x, z ) K 4 ( z, t )dz
a
1
1
1⎞
⎛ z −t
= − ∫ ( x − z) ⎜
− tz − ⎟
12 0
3⎠
⎝ 2
=
x−t
122
b
K 6 ( x, t ) = ∫ K ( x, z ) K 5 ( z, t )dz
a
1
⎛ z −t ⎞
= ∫ ( x − t ) ⎜ 2 ⎟ dz
⎝ 12 ⎠
0
=
1 ⎛ x+t
1⎞
− xt − ⎟
2 ⎜
12 ⎝ 2
3⎠
Görüldüğü gibi çift indisli itere çekirdekler ile tek indisli çekirdekler birbirlerine
benzemektedirler. Bu duruma bu şekilde devam edip genel bir ifade elde edilmek
istenirse;
39
k = 1, 2, 3, ... değerleri için
K n ( x, t ) = K 2 k −1 ( x, t ) =
n = 2k − 1 ise
(−1) k −1
(x − t)
12k −1
n = 2k ise
K n ( x, t ) = K 2 k ( x , t ) =
(−1) k −1 ⎛ x + t
1⎞
− xt − ⎟
k −1 ⎜
12
3⎠
⎝ 2
şeklinde itere çekirdekler bulunur.
4.1.5. Ardışık yaklaşımlar metodu
b
u ( x) = f ( x) + λ ∫ K ( x, y )u ( y )dy
(4.3)
a
integral denklemini göz önüne alalım. İlk yaklaşım olarak λ = 0 düşünelim. λ = 0
için u ( x) = f ( x) olup bunu u0 ( x) ile gösterelim. Eş. 4.3’ de aynı notasyonu
kullanmak gerekirse;
b
u1 ( x) = f ( x) + λ ∫ K ( x, y )u0 ( y )dy
(4.4)
a
denklemi elde edilir. Burada integral x in bir fonksiyonu olacağından bu integrali;
b
φ1 ( x) = ∫ K ( x, y ) u0 ( y )dy
(4.5)
a
ile gösterdiğimiz takdirde Eş. 4.4 aşağıdaki gibi
u1 ( x) = f ( x) + λ φ1 ( x)
(4.6)
40
yazılır. Aynı yazıma uygun olması bakımından
u0 ( x) = f ( x) = φ0 ( x)
(4.7)
olarak kabul edelim. Eş. 4.7 ’ i , Eş. 4.6’ da yerine yazarsak yani f ( x) yerine φ0 ( x)
yazarsak,
u1 ( x) = φ0 ( x) + λφ1 ( x)
(4.8)
elde edilir. Eş. 4.4’ den yararlanarak,
b
u2 ( x) = f ( x) + λ ∫ K ( x, y )u1 ( y )dy
(4.9)
a
şeklinde alınabilir. Buradan Eş. 4.8 , Eş. 4.9’ da yerine yazılırsa,
b
u2 ( x) = f ( x) + λ ∫ K ( x, y ) [φ0 ( y ) + λφ1 ( y ) ] dy
a
b
u2 ( x) = f ( x) + λ ∫ K ( x, y )φ0 ( y )dy + λ
a
b
2
∫ K ( x, y)φ ( y)dy
1
a
olup gerekli işlemler yapıldığında ve
b
b
a
a
φ1 ( x) = ∫ K ( x, y )φ0 ( y )dy , φ2 ( x) = ∫ K ( x, y )φ1 ( y )dy
olduğu düşünüldüğünde,
u2 ( x) = φ0 ( x) + λφ1 ( x) + λ 2φ2 (t )
ifadesine ulaşılır. Böyle devam edildiğinde
41
u0 ( x) , u1 ( x) , u2 ( x) , ......, un −1 ( x) , un ( x)
şeklinde bir fonksiyon dizisi elde edilir. Sonuçta;
un ( x) = φ0 ( x) + λφ1 ( x) + λ 2φ2 (t ) + ... + λ nφn ( x)
şeklinde bir seri oluşacaktır. n = 1, 2, 3, ... için,
b
φ0 ( x) = f ( x)
ve
φn ( x) = ∫ K ( x, y )φn −1 ( y )dy
a
şeklinde formülü bulunmuş olur.
b
Örnek : u ( x) = x + λ ∫ x u ( s)ds integral denklemi a = 0 , b =
a
1
değerleri için ardışık
2
yaklaşımlar yöntemi ile çözümünü bulalım.
u ( x) = φ0 ( x) + λφ1 ( x) + λ 2φ2 ( x) + ... + λ nφn ( x)
şeklinde bir çözüm arıyoruz. Bu serinin hesaplanması için
φ0 ( x), φ1 ( x), φ2 ( x), ..., φn ( x)
fonksiyonlarının değerlerinin hesaplanması gerekmektedir. Burada
φ0 ( x) = f ( x)
ve
(n = 1, 2, 3, ...) için
b
φn ( x) = ∫ K ( x, s )φn −1 ( s)ds
a
şeklinde iterasyon yaparak değerleri hesaplayalım.
(4.10)
42
K ( x, s) = x ve a = 0 , b =
φ0 ( x) = f ( x) = x
1
2
φ1 ( x) = ∫ K ( x, s)φ0 ( s)ds
0
1
2
= ∫ xs ds
0
s2
=x
2
=
1
2
= x ∫ s ds
0
1
2
0
x
8
1
2
φ2 ( x) = ∫ K ( x, s )φ1 ( s )ds
0
1
2
s
= ∫ x ds
8
0
=x
=
1
2 2
s
16 0
x
82
1
2
φ3 ( x) = ∫ K ( x, s )φ2 ( s)ds
0
1
2
=∫x
0
=x
=
s
ds
64
2
1
2
s
128 0
x
83
bu şekilde devam edilirse
1
2
şeklindedir.
43
φn ( x) =
x
8n
olarak bulunur. Bu değerleri Eş. 4.10’ da yerine yazarsak
x
x
x
+ λ 2 2 + ... + λ n n
8
8
8
2
λx ⎡ λ λ
λ n −1 ⎤
1
...
= x+
+
+
+
+
8 ⎢⎣ 8 82
8n −1 ⎥⎦
u ( x) = x + λ
olup parantez içindeki geometrik serinin ortak çarpanı
q=
λ
8
olup bu serinin toplamı
T=
1
1−
λ
=
8
8−λ
8
şeklindedir. Bu ifadeyi seride yerine yazarsak
u ( x) = x +
λx 8
8 8−λ
λx
= x+
8−λ
8x − λ x + λ x
=
8−λ
8x
=
8−λ
olarak bulunur.
44
4.1.6. Çözücü çekirdek
2.tip Fredholm integral denklemi
b
u ( x) = f ( x) + λ ∫ K ( x, y )u ( y )dy
a
biçimindedir. K ( x, y ) çekirdeği dejenere çekirdek olarak kabul edilirse dejenere
çekirdeğin genel hal durumundan faydalanılarak
n
⎡⎛ n
⎤
⎞
D( x, t ; λ ) = ⎢⎜ ∑ ri ( x) ∑ Δ ij ⎟ si (t ) ⎥
i , j =1
⎠
⎣⎢⎝ i =1
⎦⎥
şeklinde yazılır. Buradan
b
u ( x) = f ( x) + λ ∫
a
ifadesindeki
D ( x, t ; λ )
f (t )dt
D (λ )
D ( x, t ; λ )
oranı R ( x, t ; λ ) ile gösterilir ve buna çözücü çekirdek veya
D (λ )
resolvant denir. Burada çözücü çekirdek,
R ( x, t ; λ ) =
D ( x, t ; λ )
D (λ )
şeklinde gösterilir. Bu ifadeyi yerine koyarsak
b
u ( x) = f ( x) + λ ∫ R ( x, t ; λ ) f (t )dt
a
biçiminde integral denklemi elde edilir.
(4.11)
45
4.1.7. Çekirdek ile çözücü çekirdek arasındaki ilişki
b
u ( x) = f ( x) + λ ∫ K ( x, t )u (t )dt
a
fredholm integral denkleminde t = y alırsak, integrasyon değişkeni y olur ve
denklemi yeniden düzenleyip yazarsak,
b
u ( x) = f ( x) + λ ∫ K ( x, y )u ( y )dy
(4.12)
a
ifadesi oluşur. Eş. 4.11 ve Eş. 4.12’ i kullanarak u ( x) ’ leri eşitlersek;
b
b
a
a
f ( x) + λ ∫ K ( x, y )u ( y )dy = f ( x) + λ ∫ R ( x, t; λ ) u (t )dt
yazılır. Eşitliğin sol tarafındaki u ( y ) ’ yi Eş. 4.11’ i kullanarak yazarsak,
b
b
⎡
⎤
+
=
K
(
x
,
y
)
f
(
y
)
λ
R
y
,
t
;
λ
f
(
t
)
dt
dy
(
)
⎢
⎥
∫a
∫a
∫a R ( x, t; λ ) f (t )dt
⎣
⎦
b
b
b
⎡
⎤
+
−
K
(
x
,
y
)
f
(
y
)
λ
R
y
,
t
;
λ
f
(
t
)
dt
dy
(
)
⎢
⎥
∫a
∫a
∫a R ( x, t; λ ) f (t )dt = 0
⎣
⎦
b
b
⎡
⎤
+
−
K
(
x
,
y
)
λ
K
(
x
,
y
)
R
y
,
t
;
λ
dy
R
x
,
t
;
λ
(
)
(
)
⎢
⎥ f (t )dt = 0
∫a ⎣
∫a
⎦
b
olarak bulunur. Burada f (t ) ≠ 0 olacaktır. Bu ise köşeli parantezin içindeki ifadenin
sıfır olmasıyla mümkündür. O halde
b
K ( x, y ) + λ ∫ K ( x, y ) R ( y, t ; λ ) dy − R ( x, t ; λ ) = 0
a
46
b
R ( x, t ; λ ) = K ( x, y ) + λ ∫ K ( x, y ) R ( y, t ; λ ) dy
a
elde edilir.
4.1.8. Çözücü çekirdeğin itere çekirdekler yardımıyla bulunması
b
u ( x) = f ( x) + λ ∫ K ( x, t )u (t )dt
a
fredholm integral denklemini ele alalım. Ardışık yaklaşımlar
kullandığımız eşitliği tekrardan göz önüne alırsak,
∞
u ( x) = f ( x) + ∑ φn ( x)λ n
n =1
şeklinde olduğunu hatırlarız. Buradan
b
φ1 ( x) = ∫ K ( x, t )φ0 (t )dt
a
b
= ∫ K1 ( x, t ) f (t )dt
a
b
φ2 ( x) = ∫ K ( x, t )φ1 (t )dt
a
b
= ∫ K 2 ( x, t ) f (t )dt
a
b
φ3 ( x) = ∫ K ( x, t )φ2 (t )dt
a
b
= ∫ K 3 ( x, t ) f (t )dt
a
metodunda
47
elde edilir ve bu iterasyona devam ederek φn ( x) fonksiyonları itere çekirdek yardımı
ile bulunabilir. K n ( x, t ) itere çekirdekleri n = 1, 2, 3, ... olmak üzere
b
K n ( x, t ) = ∫ K ( x, z ) K n −1 ( z , t )dz
a
formülünü verebiliriz. Resolvantı bulmak için
∞
u ( x) = f ( x) + ∑ φn ( x)λ n
n =1
serisini kullanarak çözücü çekirdeğin eşitliğine benzetirsek,
∞
u ( x) = f ( x) + λ ∑ φn ( x)λ n −1
n =1
elde edilir. Çözücü çekirdeği de,
b
u ( x) = f ( x) + λ ∫ R ( x, t ; λ ) f (t )dt
a
şeklinde tanımlamıştık. O halde resolvantı itere çekirdek yardımıyla
∞
R ( x, t ; λ ) = ∑ K n ( x, t )λ n −1
n =1
bağıntısı ile tanımlayabiliriz.
1
Örnek :
u ( x) = x − 2 ∫ ( x − t )u (t )dt
integral denklemini
0
oluşturmak suretiyle bu denklemin çözümünü bulalım.
R ( x, t ; λ )
resolvantı
48
K ( x, t ) = x − t çekirdek fonksiyonları için itere çekirdekler
K1 ( x, t ) = x − t
b
K 2 ( x, t ) = ∫ K ( x, t1 ) K1 (t1 , t )dt1
a
1
= ∫ ( x − t1 )(t1 − t )dt1
0
=
1
x+t
− xt −
2
3
b
K 3 ( x, t ) = ∫ K ( x, t1 ) K 2 (t1 , t )dt1
a
1
1⎞
⎛t +t
= ∫ ( x − t1 ) ⎜ 1
− t1t − ⎟ dt1
3⎠
⎝ 2
0
t−x
=
12
.
.
.
K n ( x, t ) = K 2 k −1 ( x, t ) =
K n ( x, t ) = K 2 k ( x , t ) =
(−1) k −1
(x − t)
12k −1
(−1) k −1 ⎛ x + t
1⎞
− xt − ⎟
k −1 ⎜
12
3⎠
⎝ 2
k = 1, 2, 3, ...
,
,
k = 1, 2, 3, ...
çekirdeklerini daha önceden hesaplamıştık. Şimdi φn ( x) ifadelerini hesaplayalım.
1
φ1 ( x) = ∫ K1 ( x, t ) f (t ) dt
0
1
= ∫ ( x − t )t dt
0
=
3x − 2
6
49
1
φ2 ( x) = ∫ K 2 ( x, t ) f (t ) dt
0
1
1⎞
⎛ x+t
= ∫⎜
− xt − ⎟t dt
2
3⎠
0⎝
x
=−
12
1
φ3 ( x) = ∫ K 3 ( x, t ) f (t ) dt
0
1
⎛t−x⎞
= ∫⎜
⎟ t dt
12 ⎠
0⎝
3x − 2
=
6.12
1
φ4 ( x) = ∫ K 4 ( x, t ) f (t ) dt
0
1
1⎞
⎛ 1 ⎞⎛ x + t
= ∫ ⎜ − ⎟⎜
− xt − ⎟ t dt
12 ⎠⎝ 2
3⎠
0⎝
x
= 2
12
φn ( x) = φ2 k −1 ( x) =
3x − 2 ⎛ 1 ⎞
⎜
⎟
6 ⎝ 12k −1 ⎠
φn ( x) = φ2 k ( x) = ( −1)
k
x
12k
k = 1, 2,3,........
k = 1, 2,3,........
değerleri elde edilir. Bu değerleri de;
u ( x) = φ0 ( x) + λφ1 ( x) + λ 2φ2 ( x) + ... + λ nφn ( x)
eşitliğinde yerine yazarak ardışık yaklaşımlar metoduyla verilen problemi çözebiliriz.
Ancak burada resolvant yardımıyla örneğin çözümünü vereceğiz. O halde,
R ( x, t ; λ ) = K1 ( x, t ) + λ K 2 ( x, t ) + λ 2 K 3 ( x, t ) + ... + λ n −1 K n ( x, t ) + .....
50
şeklindedir. λ = −2 olduğu da göz önüne alınırsa;
1⎞
1 ⎛ x+t
1 ⎞⎤
⎛ x+t
⎛t−x⎞
3 ⎡
− xt − ⎟ + (−2) 2 ⎜
− xt − ⎟ ⎥
R ( x, t ; λ ) = x − t + (−2) ⎜
⎟ + (−2) ⎢ − ⎜
3⎠
3 ⎠⎦
⎝ 2
⎝ 12 ⎠
⎣ 12 ⎝ 2
⎛ x−t ⎞
+ (−2) 4 ⎜ 2 ⎟ + .......................
⎝ 12 ⎠
⎛ 22 24
⎞
⎛ 22 24
⎞⎛ x + t
1⎞
− xt − ⎟
R ( x, t ; λ ) = ⎜1 − + 2 − ... ⎟ ( x − t ) − 2 ⎜1 − + 2 − ... ⎟ ⎜
3⎠
⎝ 12 12
⎠
⎝ 12 12
⎠⎝ 2
olup burada parantez içindeki serinin ortak çarpanı
q=−
22
1
=−
12
3
şeklinde bulunur. Bu geometrik serinin toplamının değeri,
T=
1
3
=
⎛ 1⎞ 4
1− ⎜ − ⎟
⎝ 3⎠
dir. Bu durumda resolvant
3
3 x+t
1⎞
− xt − ⎟
( x − t ) − 2 ⎛⎜
4
4⎝ 2
3⎠
1
= ( 3xt − 3t + 1)
2
R ( x, t ; λ ) =
şeklinde bulunur. Çözüm ise,
1
1
{1 + 3xt − 3t} t dt
2
0
u ( x) = x − 2 ∫
51
= x − x +1−
=
1
2
1
2
olarak elde edilir.
4.1.9. Determinantlar yöntemi
b
u ( x) = f ( x) + λ ∫ K ( x, t )u (t ) dt
(4.13)
a
şeklindeki ikinci tip Fredholm integral denkleminin çözümünü
b
u ( x) = f ( x) + λ ∫ R ( x, t ; λ ) f (t ) dt
(4.14)
a
formülü ile vermiştik ve R ( x, t ; λ ) fonksiyonu Eş. 4.13’ün Fredholm çözücü
çekirdeği (resolvant) diye isimlendirmiştik. D(λ ) ≠ 0 olmak koşuluyla
R ( x, t ; λ ) =
D ( x, t ; λ )
D (λ )
(4.15)
bağıntısı ile tanımlamıştık. Burada D ( x, t ; λ ) ve D(λ ) , λ cinsinden yazılmış kuvvet
serileridir. Resolvantı hesaplamak için
(−1) n
D ( x , t ; λ ) = K ( x, t ) + ∑
Bn ( x, t )λ n
n!
n =1
∞
(−1) n
Cn λ n
!
n
n =1
∞
D (λ ) = 1 + ∑
(4.16)
(4.17)
52
B0 ( x, t ) = K ( x, t )
formülleri kullanılır. İlk yaklaşım olarak
olarak seçilir.
n = 1, 2,3,...... için diğer değerleri
K ( x, t1 )
K (t1 , t1 )
.
.
.
.
K (tn , t ) K (tn , t1 )
.
K ( x, t )
K (t1 , t )
b b
b
a a
a
Bn ( x, t ) = ∫ ∫ ... ∫
K (t1 , t1 )
K (t2 , t1 )
b b
b
a a
a
Cn = ∫ ∫ ... ∫
K (t1 , t2 )
K (t2 , t2 )
.
.
.
.
.
K ( x, t n )
K (t2 , tn )
.
.
.
.
.
.
.
.
.
.
K (t1 , tn )
dt1 dt2 ... dtn
K (tn , tn )
K (t2 , tn )
.
.
.
.
.
.
K (tn , tn )
.
K (tn , t1 ) K (tn , t 2 )
.
.
.
dt1 dt2 ... dtn
formülleri ile hesaplanır. D ( x, t ; λ ) fonksiyonu fredholm minörü, D(λ ) fonksiyonu
ise Fredholm determinantı olarak isimlendirilir. Bn ( x, t ) ve Cn katsayıları Eş. 4.16
ve Eş. 4.17’de yerine yazılırsa bir seri elde edilir ve bu seriler genellikle
yakınsaktırlar. İstenilen tüm değerler hesaplandıktan sonra Eş. 4.14’ te yerine yazıp
integral alınırsa aranılan çözüm elde edilmiş olur.
1
Örnek : u ( x) = f ( x) + λ ∫ xet u (t ) dt integral denkleminin çözümünü determinantlar
0
yöntemi ile bulalım.
B0 ( x, t ) = K ( x, t ) = xet dir.
B1 ( x, t ) = ∫
K ( x, t ) K ( x, t1 )
dt
K (t1 , t ) K (t1 , t1 ) 1
53
1
=∫
0
xet
xet1
t1 xet
t1 xet1
dt1
= ∫ ( xt1 et1 +t − xt1 et1 +t ) dt1
=0
1 1
B2 ( x, t ) = ∫ ∫
0 0
xet
t1 xet
xet1
t1 xet1
xet2
t1 xet2 dt1 dt2 = 0
t2 xet
t2 xet1
t2 xet2
n = 3, 4, ... için Bn ( x, t ) = 0 olduğu rahatlıkla görülebilir. Şimdi de Cn ’ leri bulalım.
1
1
C1 = ∫ K (t1 , t1 ) dt1 = ∫ t1et1 dt1
0
0
1
= et1 (t1 − 1) = 1
0
1 1
C2 = ∫ ∫
0 0
t1et1
t2 et1
t1et2
dt1 dt2 = 0
t 2 e t2
ve diğer değerleri için de Cn = 0 olduğu görülebilir. O halde bu serilerin değerlerini
yerine yazarsak Fredholm minörü
D ( x, t ; λ ) = xet
şeklinde olup Fredholm determinantı da
D(λ ) = 1 + (−1)1λ = 1 − λ
elde edilir. Bulunan bu değerler Eş. 4.15’ te yerine yazılırsa
R ( x, t ; λ ) =
D ( x, t ; λ ) xet
=
1− λ
D (λ )
54
sonucuna ulaşılır. Bu sonuç verilen problemin yani,
1
u ( x) = f ( x) + λ ∫ xet u (t ) dt
(λ ≠ 1)
0
denkleminin çözümüdür. O halde
1
xet
f (t ) dt
1− λ
0
u ( x) = f ( x) + λ ∫
yazılır. f ( x) = e − x için
u ( x) = e − x +
λ
1− λ
x
çözümü bulunur. Bu bölümde verilen tüm yöntemler analitik çözüm aradığımız için
sadece özel problemlerin çözümünde kullanıldığına dikkat ediniz.
4.2. Volterra İntegral Denklemlerinin Çözüm Yöntemleri
Bu bölümde Volterra integral denklemlerinin çözüm yöntemlerini vereceğiz.
Fredholm integral denklemindeki bazı metotlar Volterra integral denklemlerinin
çözümü için kullanılabilir. Volterra integral denklemini Fredholm integral
denkleminden ayıran tek fark integral sınırlarından birinin x gibi bir değişken
olmasıdır. Bazı durumlarda bu özellik çözümü daha zorlaştıran bir faktör olarak
ortaya çıkmaktadır.
4.2.1. Konvolisyon teoremi
f (t ) ve g (t ) fonksiyonları t ≥ 0 için tanımlanmış sürekli iki fonksiyon olsun. Bu iki
fonksiyonun konvolisyonu
55
t
φ (t ) = ∫ f (t ) g (t − τ ) dτ
(4.18)
0
şeklinde olup φ (t ) fonksiyonu t ≥ 0 da tanımlanmış ve sürekli bir fonksiyondur.
Eş.4.18’ e Laplace dönüşümü uygulanırsa,
L {φ (t )} = L { f (t )} L { g (t )}
(4.19)
ifadesi bulunur. Bir başka ifadeyle; iki fonksiyonun konvolisyonuna Laplace
dönüşümü uygulanırsa, bu iki fonksiyonun ayrı ayrı Laplace dönüşümlerinin
çarpımına eşittir. Çekirdeği t − τ (ya da x − τ )’ nun fonksiyonu olan aşağıdaki ikinci
tip Volterra integral denklemini ele alırsak,
t
φ (t ) = f (t ) + ∫ K ( x − τ )φ (τ ) dτ
(4.20)
0
integral denklemi konvolisyon tipi integral denklem olarak ifade edilir. O halde
L {φ (t )} = Φ( s) ,
L { f (t )} = F ( s) ,
L { K (t )} = K ( s)
olsun Eş. 4.20’ deki integral denkleminin her iki yanına Laplace dönüşümü alıp
konvolisyon teoremini uygularsak
F (s)
Φ ( s ) = F ( s ) + K ( s )Φ ( s ) ⇒ Φ ( s ) =
1 − K ( s )
,
( K ( s ) ≠ 1)
(4.21)
buluruz. Φ ( s ) nin ters dönüşümü olan φ ( x) fonksiyonu Eş. 4.20’ deki integral
denklemin çözümü olur [5].
4.2.2. Laplace dönüşümü ile volterra integral denklemlerinin çözümü
f (t ) ve g (t ) bilinen fonksiyonlar olmak üzere Volterra integral denklemleri
56
t
φ (t ) = f (t ) + ∫ φ (τ ) g (t − τ ) dτ
(4.22)
0
şeklindedir. Eş. 4.22’ nin her iki tarafına Laplace dönüşümü uygulayıp Φ ( s ) değeri
yalnız bırakılır. Ardından Φ ( s ) fonksiyonuna ters Laplace dönüşümünü uygulayarak
Eş.4.22’ nin çözümü elde edilir.
t
φ (t ) = 5t − e − ∫ φ (τ ) et −τ dτ Volterra integral denklemini Konvolisyon
t
Örnek:
0
teoremi yardımıyla çözelim.
Laplace dönüşümü yapılırsa, konvolisyon teoreminden,
L {φ (t )} = 5L {t} − L {et } − L {φ (t )} L {et }
elde edilir. Ayrı ayrı değerleri hesaplayıp yerine yazarsak,
Φ(s) = 5
1
1
1
−
− Φ(s)
2
s
s −1
s −1
1 ⎞ 5
1
⎛
Φ(s) ⎜1 +
⎟= 2 −
s −1
⎝ s −1 ⎠ s
Φ(s) =
=
5 ( s − 1)
s −1
−
3
s
s ( s − 1)
5 5 1
− −
s 2 s3 s
bulunur. Buradan ters Laplace dönüşümü uygulanırsa;
⎧1⎫
⎧1⎫
⎧1 ⎫
− 5L −1 ⎨ 3 ⎬ − L −1 ⎨ ⎬
2⎬
⎩s ⎭
⎩s ⎭
⎩s⎭
2
5t
= 5t −
−1
2
φ (t ) = 5L −1 ⎨
çözümü elde edilir.
57
t
φ (t ) = sin t + 2 ∫ cos(t − τ )φ (τ ) dτ şeklindeki Volterra integral denklemini
Örnek:
0
konvolisyon teoremi yardımıyla çözelim.
Konvolisyon teoreminden;
L {φ (t )} = L {sin t} + 2L {φ (t )} L {cos t}
Φ(s) =
1
s
+2 2
Φ ( s)
s +1
s +1
2
elde edilir. Buradan Φ ( s ) çekilirse
2s ⎤
1
⎡
Φ ( s ) ⎢1 − 2 ⎥ = 2
⎣ s + 1⎦ s + 1
Φ(s) =
1
( s − 1)
2
bulunur. Her iki tarafa ters Laplace dönüşümü uygulanırsa
⎧
1 ⎫
2⎬
⎩ ( s − 1) ⎭
φ (t ) = L −1 ⎨
φ (t ) = tet
çözümü elde edilir.
Örnek: Aşağıdaki integral denklem sistemini çözelim.
t
x
0
0
φ1 (t ) = 1 − 2 ∫ e 2(t −τ )φ1 (τ ) dτ + ∫ φ2 (τ ) dτ
x
x
0
0
φ2 (t ) = 4t − ∫ φ1 (τ ) dτ + 4 ∫ (t − τ )φ2 (τ ) dτ
(4.23)
(4.24)
58
Her iki denklemin de her iki yanının Laplace dönüşümünü alalım ve Konvolisyon
teoreminden;
L {φ1 (t )} = L {1} − 2L {φ1 (t )} L {e 2t } + L {1} L {φ2 (t )}
1
2
1
Φ1 ( s ) = −
Φ1 ( s ) + Φ 2 ( s )
s s−2
s
Eş. 4.23 ‘den elde edilir.
L {φ2 (t )} = 4L {t} − L {1} L {φ1 (t )} + 4L {t} L {φ2 (t )}
Φ 2 (s) = 4
1 1
1
− Φ1 ( s ) + 4 2 Φ 2 ( s )
2
s
s
s
Eş. 4.24’den elde edilir. O halde alt alta yazarsak,
1
2
1
⎧
(
)
(
)
Φ
s
=
−
Φ
s
+
Φ 2 (s)
1
1
⎪⎪
s s−2
s
⎨
⎪Φ ( s ) = 4 1 − 1 Φ ( s ) + 4 1 Φ ( s )
1
2
⎪⎩ 2
s2 s
s2
elde edilir. Bu denklem sistemi çözülürse
Φ1 ( s ) =
Φ 2 ( s) =
s
( s + 1)
2
=
1
1
−
s + 1 ( s + 1)2
3s + 2
( s − 2 )( s + 1)
2
=
8 1
1 1
8 1
+
−
2
9 s − 2 3 ( s + 1) 9 s + 1
şeklindedir. Φ1 ( s) ve Φ 2 ( s ) ters Laplace dönüşümü uygulanırsa
⎧ 1 ⎫⎪
1 ⎫
−1 ⎪
−
L
⎬
⎨
2⎬
⎩ s + 1⎭
⎩⎪ ( s + 1) ⎭⎪
L −1 {Φ1 (t )} = L −1 ⎧⎨
φ1 (t ) = e − t − te − t
(4.25)
59
8
9
1 ⎫ 1 −1 ⎧⎪ 1 ⎫⎪ 8 −1 ⎧ 1 ⎫
− L ⎨
⎬+ L ⎨
⎬
2⎬
⎩s − 2⎭ 3
⎩ s + 1⎭
⎪⎩ ( s + 1) ⎪⎭ 9
8
9
1
3
L −1 {Φ 2 ( s )} = L −1 ⎧⎨
8
9
φ2 (t ) = e 2t − e −t + te − t
elde edilir. Bulduğumuz bu φ1 (t )
ve φ2 (t )
fonksiyonları istenen çözüm
fonksiyonlardır.
4.2.3. Gama ve Beta fonksiyonları
Gama fonksiyonu veya 2. tip euler integrali Γ ( x ) ile gösterilir ve
∞
Γ ( x) = ∫ e − t t x −1 dt
(4.26)
0
ile tanımlanır. Burada x, Re( x) > 0 olan herhangi bir kompleks sayıdır. Özel olarak
x = 1 için
∞
Γ(1) = ∫ e − t dt = 1
(4.27)
0
bulunur. Eş. 4.26’ a kısmi integrasyon uygulanırsa
e− t = u, t x −1dx = dv
alalım. O halde
−e − t dt = du , v =
1 x
t
x
şeklindedir. İntegralin çözümünden,
60
Γ( x) =
1
Γ( x + 1)
x
ifadesi elde edilir. Buradan gama fonksiyonunun temel özelliklerinden birini elde
edeceğiz. Yani
Γ ( x + 1) = x Γ ( x )
(4.28)
eşitliği elde edilir. Eş. 4.27’ de kullanarak
Γ (2) = Γ (1 + 1) = 1 Γ (1) = 1
Γ (3) = Γ (2 + 1) = 2 Γ (2) = 2!
Γ (4) = Γ (3 + 1) = 3 Γ (3) = 3!
ve genel olarak
Γ (n) = ( n − 1)!
(4.29)
bulunur. Beta fonksiyonu da
1
B ( x, y ) = ∫ t x −1 (1 − t ) y −1 dt
(4.30)
0
bağıntısı ile tanımlanmıştır. Burada Re( x ) > 0, Re( y ) > 0 olarak alınır. Beta ve gama
fonksiyonları arasında önemli bir bağıntı
B ( x, y ) =
Γ ( x ) Γ( y )
Γ( x + y )
(4.31)
şeklindedir. Beta fonksiyonu matematikte euler integralinin ilk türüdür. Ayrıca beta
fonksiyonu simetriktir.
61
4.2.4. Volterra integral denklemlerinin gama ve beta fonksiyonları yardımıyla
çözülmesi
1. tip Volterra integral denkleminin
x
x = ∫ ( x − t ) n u (t ) dt
m
(4.32)
0
şeklindeki özel bir durumunu göz önüne alalım. Bu tip denklemler gama- beta
fonksiyonları
yardımıyla
çözülebilir.
Yukarıdaki
integral
denklem
için
m ≥ 0, n > −1 olup m ve n reel sayılardır. Bu integral denklemin her iki yanını
r > −1 ve reel olmak üzere ( z − x )r ile çarpalım ve x ’ e göre 0 ile z arasındaki
integralini alalım.
x
⎡x
⎤
n
m
r
∫0 ( z − x) ⎢⎣ ∫0 ( x − t ) u(t ) dt ⎥⎦ dx = ∫0 x ( z − x) dx
z
r
(4.33)
olur. Burada x = vz alalım. Eş. 4.33’ ün sağındaki integral ( m + r + 1 > m ≥ 0) olmak
üzere;
x
1
m
r
m + r +1
m
r
∫ x ( z − x) dx = z ∫ v (1 − v) dv
0
0
=z
m + r +1
B (m + 1, r + 1)
Γ(m + 1)Γ(r + 1)
= z m + r +1
Γ(m + r + 2)
sonucu elde edilir. Eşitliğin birinci yanının hesabı yapılırsa,
z x
⎡x
⎤
⎡
⎤
r
n
r
n
(
z
−
x
)
(
x
−
t
)
u
(
t
)
dt
dx
=
⎢∫
⎥
⎢ ∫ ( z − x) ( x − t ) u (t ) dt ⎥ dx
∫0
∫
0 ⎣0
⎣0
⎦
⎦
z x
⎡
⎤
= ∫ ⎢ ∫ ( z − x) r ( x − t ) n dx ⎥ u (t ) dt
0 ⎣0
⎦
z
62
şeklinde yeniden düzenlenerek yazılabilir. Burada x = t + v( z − t ) alalım.
z
∫ ( z − x) ( x − t )
r
0
n
dx = ( z − t ) n + r +1 ∫ v n (1 − v) r dv
= ( z − t ) n + r +1 B (n + 1, r + 1)
Γ(n + 1)Γ(r + 1)
= ( z − t ) n + r +1
Γ(n + r + 2)
elde edilir. Burada
Γ(n + 1)Γ(r + 1)
çarpanı sabit olacağından integral dışına atılarak
Γ(n + r + 2)
ve Γ ( r + 1) her iki yandan sadeleştirilerek,
Γ(n + 1)
Γ(m + 1)
( z − t ) n + r +1 u (t ) dt = z m + r +1
∫
Γ(n + r + 2)
Γ(m + r + 2)
bulunur. n + r + 1 = h olacak şekilde negatif olmayan bir h sayısı bulunacaktır. Buna
göre
Γ ( n + r + 2) = Γ ( h + 1)
olur.
Diğer
taraftan
r = h − n −1
yazılacağından
m + r + 2 = m + h − n + 1 olup
Γ ( m + r + 2) = Γ ( m + h − n + 1)
demektir. İfade yeniden düzenlenirse,
∫ ( z − t ) u (t ) dt = z
h
m+ h−n
Γ(m + 1)Γ(h + 1)
Γ(n + 1)Γ(m + h − n + 1)
olarak bulunur. Gama fonksiyonunun özelliklerinden dolayı Γ( h + 1) = h ! alınırsa;
63
( z − t )h
Γ(m + 1)
m+h−n
∫ h ! u (t ) dt = z Γ(n + 1)Γ(m + h − n + 1)
şeklinde yazılabilir. Buradan z ’ ye göre her iki tarafın h + 1 defa türev alınırsa,
u ( x) =
Γ(m + 1)
z m − n −1
Γ(n + 1)Γ(m − n)
(4.34)
bulunur. Bulunan bu ifade integral denkleminin çözümüdür. Dolayısıyla Volterra
integral denklemlerini Γ fonksiyonları yardımıyla çözebiliriz [3].
x
1
x3
2
(
)
(
)
sin
x
−
t
u
t
dt
=
x
−
x
+
2 ∫0
6
Örnek:
integral
fonksiyonu yardımıyla çözelim.
sin x = x −
x3 x5 x 7 x9
+ − + − ...
3! 5! 7! 9!
olduğu bilinmektedir. Buradan,
x3
x5 x 7 x9
sin x − x +
=
− + − ...
3!
5! 7! 9!
yazılabilir. Bu eşitlik kullanılarak integral denklemi
x
1
x5 x 7 x9
t
(
x
−
z
)
u
(
t
)
dt
=
− + − ...
2 ∫0
5! 7! 9!
x
2
∫ ( x − z ) u (t ) dt = 5! x
t
0
5
−
2 7 2 9
x + x − ...
7!
9!
denkleminin
çözümünü
Γ
64
şeklinde yazılabilir. Böylece ikinci taraf cebirsel toplam şekline dönüştürülmüş olup
bunun her terimi için ayrı ayrı çözüm araştırılacaktır. Sağ taraftaki terimler sırasıyla
φ1 ( x), φ2 ( x), ... şeklinde çözüm fonksiyonlarını göstersin. O halde
u ( x) =
2
2
2
φ1 ( x) − φ2 ( x) + φ3 ( x) − ...
5!
7!
9!
toplamı ile bulunabilecektir. φ1 ( x), φ2 ( x), ... ara çözümleri ayrı ayrı hesaplamamız
gerekir.
φ1 ( x) için n = 2, m = 5 ve
Γ (m + 1) = Γ (6) = 5!
Γ (n + 1) = Γ (3) = 2!
Γ ( m − n) = Γ (3) = 2!
m − n −1 = 5 − 2 −1 = 2
olup φ1 ( x) =
5! 2
x bulunur.
2! 2!
φ2 ( x) için n = 2, m = 7 ve
Γ (m + 1) = Γ (8) = 7!
Γ (n + 1) = Γ (3) = 2!
Γ ( m − n) = Γ (5) = 4!
m − n −1 = 7 − 2 −1 = 4
olup
φ2 ( x) =
7! 4
x
2! 4!
bulunur.
φ3 ( x) için n = 2, m = 9 ve
Γ ( m + 1) = Γ (10) = 9!
Γ (n + 1) = Γ (3) = 2!
65
Γ (m − n) = Γ(7) = 6!
m − n −1 = 7 −1 = 6
9! 6
x bulunur. Bulduğumuz değerleri yerine yazarsak,
2! 6!
olup
φ3 ( x) =
u ( x) =
2 5! 2 2 7! 4 2 9! 6
x −
x +
x − ...
5! 2! 2!
7! 2! 4!
9! 2! 6!
x 2 x 4 x 6 x8
− + − + ...
2! 4! 6! 8!
= 1 − cos x
=
şeklinde elde edilir.
4.2.5. Volterra integral denklemlerinin çözücü çekirdek(resolvant)
yardımıyla çözülmesi
x
u ( x) = f ( x) + λ ∫ K ( x, t )u (t ) dt
0
şeklindeki 2. Tip Volterra integral denklemini göz önüne alalım. K ( x, t ) fonksiyonu
0 ≤ x ≤ a, 0 ≤ t ≤ x ve f ( x ) fonksiyonu 0 ≤ x ≤ a aralıklarda süreklidirler. Bu
denklemi tam seri şeklinde açılırsa,
u ( x) = u0 ( x ) + λ u1 ( x ) + λ 2u2 ( x ) + ... + λ n un ( x )
serisi elde edilir. Bu seri λ parametresine göre kuvvet serisidir. Bu seriyi yukarıdaki
integral denklemde u ( x) yerine yazalım;
u ( x) = u0 ( x) + λu1 ( x) + λ 2u2 ( x) + ... + λ nun ( x) + ...
x
= f ( x) + λ ∫ K ( x, t ).{u0 ( x) + λ u1 ( x) + λ 2u2 ( x) + ... + λ n un ( x) + ...} dt
0
66
eşitliğin sağ yanını λ ya göre düzenler ve λ ’nın aynı kuvvetli terimler için eşitliğin
her iki yanındaki terimleri karşılıklı olarak yazarsak;
u0 ( x ) = f ( x )
x
u1 ( x) = ∫ K ( x, t )u0 (t ) dt
0
x
u2 ( x) = ∫ K ( x, t )u1 (t ) dt
0
.
.
.
x
un ( x) = ∫ K ( x, t )un −1 (t ) dt
0
bulunur. u0 ( x) = f ( x) olduğundan bununla ikinci bağıntıya gidilirse;
x
x
0
0
u1 ( x) = ∫ K ( x, t )u0 (t ) dt = ∫ K ( x, t ) f (t ) dt
yazılır. Benzer şekilde u2 ( x) için;
x
u2 ( x) = ∫ K ( x, t )u1 (t ) dt
0
⎡t
⎤
= ∫ K ( x, t ) ⎢ ∫ K (t , t1 ) f (t1 ) dt1 ⎥ dt
0
⎣0
⎦
x
x
x
0
0
= ∫ f (t1 ) dt1 ∫ K ( x, t ) K (t , t1 ) dt
x
= ∫ K 2 ( x, t ) f (t1 ) dt1
0
yazılır. Burada
67
x
K 2 ( x, t1 ) = ∫ K ( x, t ) K (t , t1 ) dt1
t1
işlemlere bu şekilde devam edersek genel olarak ( n = 1, 2,3, ...)
x
un ( x) = ∫ K n ( x, t ) f (t ) dt
0
ifadesi elde edilecektir.
K n ( x, t )
fonksiyonlarının itere çekirdekler olduğu
bilinmektedir ve tekrar hatırlatılacak olursa,
K1 ( x, t ) = K ( x, t )
x
K n +1 ( x, t ) = ∫ K ( x, z ) K n ( z , s ) dz
t
şeklindedir. Seri açılımı yukarıdaki işlemler sonucunda,
∞
x
n =1
0
u ( x) = f ( x) + ∑ λ n ∫ K ( n ) ( x, t ) f (t ) dt
şeklinde yazılabilir.
∞
∑λ
n =0
n
K n +1 ( x, t ) serisi K ( x, t ) çekirdek fonksiyonu sürekli olarak
kabul edildiğinden mutlak ve düzgün yakınsak olup buna Resolvant veya Çözücü
çekirdek denir. Fredholm integral denklemlerinde olduğu gibi R ( x, t; λ ) ile
gösterilmektedir. Bu durumda
∞
R ( x, t ; λ ) = ∑ λ n K n +1 ( x, t )
n=0
yazılabilmektedir. R ( x, t; λ ) resolvantı için çekirdek ve çözücü çekirdek arasında
aşağıdaki bağıntıyı,
x
R ( x, t ; λ ) = K ( x, t ) + λ ∫ K ( x, t ) R ( x, t ; λ ) dt
0
68
şeklinde elde edilir. Bu bağıntı sınır değerleri dışında Fredholm integral denklemleri
ile aynı özelliği taşıdığı görülmektedir. R ( x, t; λ ) hesaplanabildiği takdirde Volterra
integral denkleminin bir çözümü,
x
u ( x ) = f ( x) + λ ∫ R ( x, t ; λ ) f (t ) dt
0
şeklindedir.
x
u ( x ) = et + ∫ e x
2
Örnek:
2
−t 2
u (t ) dt
integral
denkleminin
0
yardımıyla çözelim.
K ( x, t ) = e x
2
−t 2
, λ = 1 olup itere çekirdeklerini hesaplayalım.
K1 ( x, t ) = K ( x, t ) = e x
2
−t 2
x
K 2 ( x, t ) = ∫ K ( x, z ) K1 ( z , t ) dz
t
x
= ∫ ex
2
− z2
2
− z2
ez
2
−t 2
dz
t
x
= ∫ ex
dz
t
= ex
2
−t 2
x
∫ dz
t
= ( x − t ) ex
2
−t 2
bulunur.
x
K 3 ( x, t ) = ∫ K ( x, z ) K 2 ( z , t ) dz
t
x
= ∫ ex
2
− z2
( z − t )e z
2
t
= ex
2
−t 2
x
∫ ( z − t ) dz
t
=
( x − t ) 2 x 2 −t 2
e
2
−t 2
dz
çözümünü
resolvant
69
x
K 4 ( x, t ) = ∫ K ( x, z ) K 3 ( z , t ) dz
t
x
= ∫ ex
2
( z − t ) 2 z 2 −t 2
e
dz
2
− z2
t
=
( x − t ) 3 x 2 −t 2
e
3!
.
.
.
( x − t ) n x2 −t 2
K n +1 ( x, t ) =
e
n!
olarak bulunur. Dolayısıyla bu problem için resolvant;
( x − t ) n x 2 −t 2
e
n!
n=0
∞
R ( x, t ; λ ) = ∑
R ( x, t ; λ ) = e x − t e x
2
−t 2
şeklinde ifade edilmiş olur. O halde bulunan değerler
x
u ( x ) = f ( x) + λ ∫ R ( x, t ; λ ) f (t ) dt
0
denkleminde yerine yazılırsa,
x
u ( x ) = e + ∫ e x −t e x
x2
2
−t 2 t 2
e dt
t
x2
u ( x) = e + e
x2 + x
x
∫e
t
u ( x) = e x
2
+x
çözümü elde edilir.
−t
dt
70
5. SAYISAL YÖNTEMLER
5.1. İkinci Tip Volterra İntegral Denklemleri İçin Quadrature metot
x
u ( x) = y ( x) + λ ∫ K ( x, t ) u (t ) dt
, a≤ x≤b
(5.1)
a
şeklindeki 2.Tip Volterra integral denklemini göz önüne alalım. Eş. 5.1 ’de integral
teriminin yaklaşık değerinin hesaplanmasını quadrature kuralı ile verebiliriz. x ve
t ’nin seçimi ;
x = xi = a + ih
h=
,
b−a
N
sabit uzunluk olmak üzere
xi = ti , i = 0,1, 2,......., N
olup quadrature kuralı;
xi
i
a
j =0
∫ K ( xi , t ) u (t ) dt ≈ h ∑ wij K ( xi , t j ) u (t j )
i
= h ∑ wij K ij u (t j )
j =0
formülü ile ifade edilebilir. Burada wij ’ ler ağırlık fonksiyonları olup değerleri,
wi 0 = wii =
1
2
,
wij = 1 ,
j = 1, 2,3,....., i − 1
şeklindedir. Burada çözüm fonksiyonunun her bir xi noktasındaki değeri aşağıdaki
adımlarla hesaplanabilir.
u ( x0 ) = y ( x0 )
71
u ( x1 ) = y ( x1 ) + λ h [ w10 K10u (t0 ) + w11 K11u (t1 ) ]
u ( x2 ) = y ( x2 ) + λ h [ w20 K 20u (t0 ) + w21 K 21u (t1 ) + w22 K 22u (t2 ) ]
.
.
.
i
u ( xi ) = y ( xi ) + λ h ∑ wij K ij u (t j )
,
i = 1, 2,......, N
(5.2)
j =0
Eş. 5.2’ i daha da sade şekilde yazarsak,
u 0 = y0
i
ui = yi + λ h ∑ wij K ij u j
, i = 1, 2,......, N
(5.3)
j =0
olur [4]. Bu metodun işleyişi bir örnek üzerinde aşağıdaki gibi verilebilir.
x
u ( x) =
Örnek :
1
1
− 2∫
u (t ) dt
2
2
( x + 2)
(
2)
x
−
t
+
0
şeklindeki 2.Tip Volterra integral denklemini h =
1
2
, h=
quadrature kuralı ile çözelim.
Verilenler;
K ( x, t ) =
1
( x − t + 2) 2
a = 0 ve b = 5
wi 0 = wii =
1
2
olup
,
y ( x) =
K ( xi , t j ) =
1
( xi − t j + 2) 2
1
( x + 2) 2
, wij = 1 , j = 1, 2,...., i − 1
şeklinde olduğunu tekrardan hatırlayıp çözüme geçersek,
dir.
1
4
ve b = 5 için
72
h=
1
b−a 5−0 1
seçelim. Yani N = 10 olup h =
=
=
dir.
2
10 2
N
⎧ x0 = 0.0 = t0
⎪ x = 0.5 = t
1
⎪ 1
⎪ x2 = 1.0 = t2
⎪
⇒ ⎨
.
⎪
.
⎪
.
⎪
⎪ x = 5.0 = t
10
⎩ 10
xi = ti
şeklinde tüm adımları kolaylıkla görülebilir. Buradan,
i = 0 için u (0) = y (0) ⇒ u (0) =
1
1
= = 0.25
2
(0 + 2) 4
u (0) = 0.25
1
i = 1 için u ( x1 ) = y ( x1 ) + λ h ∑ w1 j K1 j u (t j )
j =0
u (0.5) = y (0.5) − 2.
=
u (0.5) =
1
[ w10 K10 u (0) + w11 K11 u (0.5)]
2
⎤
1
1 ⎡1
1
1
1
− 2. ⎢ .
.(0.25) + .
.u (0.5) ⎥
2
2
2
(0.5 + 2)
2 ⎣ 2 (0.5 − 0 + 2)
2 (0.5 − 0.5 + 2)
⎦
4 ⎡1 4 1 1 1
⎤
− ⎢ . . + . . u (0.5) ⎥
25 ⎣ 2 25 4 2 4
⎦
u (0.5) = 0.124444444
⎡ 2
⎤
i = 2 için u ( x2 ) = y ( x2 ) + λ h ⎢ ∑ w2 j K 2 j u (t j ) ⎥
⎣ j =0
⎦
1
u ( x2 ) = y ( x2 ) − 2. .[ w20 K 20u (t0 ) + w21 K 21u (t1 ) + w22 K 22u (t2 )
2
u (1) =
]
⎡1
⎤
1
1
1
1
1 1
−⎢ .
. + 1.
.(0.12444444) + . 2 . u (1) ⎥
2
2
2
(1 + 2) ⎣ 2 (1 − 0 + 2) 4
(1 − 0.5 + 2)
2 2
⎦
73
1 1 1 4
1
= − . − .(0.12444444) − . u (1)
9 8 9 25
8
9
1 7
4
u (1) = . −
(0.12444444)
8
9 8 25
u (1) = 0.06872098
.
.
.
u (5) = 0.0536
i = 10 için
değerleri elde edilir. Şimdi de
1
4
seçerek benzer işlemleri yapalım. Yani
5−0 1
=
20
4
olduğu görülür.
u (0) = y (0) =
1
1
= = 0.25
2
(0 + 2) 4
N = 20 için h =
i = 0 için
h=
u (0) = 0.25
i = 1 için
u (0.25) =
=
u ( x1 ) = y ( x1 ) + λ h [ w10 K10u (t0 ) + w11 K11u (t1 ) ]
1
1
− .[ w10 K10u (0) + w11 K11u (0.25) ]
2
(0.25 + 2) 2
⎤
16 1 ⎡ 1
1
1
1
− ⎢ .
.(0.25) + .
. u (0.25) ⎥
2
2
81 2 ⎣ 2 (0.25 − 0 + 2)
2 (0.25 − 0.25 + 2)
⎦
17
. u (0.25) = 0.185185
16
u (0.25) = 0.174291878
i = 2 için
u ( x2 ) = y ( x2 ) + λ h [ w20 K 20u (t0 ) + w21 K 21u (t1 ) + w22 K 22u (t2 )
]
74
u (0.5) =
1
1
− 2. .[ w20 K 20u (0) + w21 K 21u (0.25) + w22 K 22u (0.5) ]
2
(0.5 + 2)
4
=
1
1⎡ 1
1
− ⎢
(0.25)
2
(0.5 + 2) 2 ⎣ 2 (0.5 − 0 + 2) 2
+1
⎤
1
1
1
(0.174291878) +
u (0.5) ⎥
2
2
(0.5 − 0.25 + 2)
2 (0.5 − 0.5 + 2)
⎦
17
4 15 1
u (0.5) = . − (0.174291878) (0.197530864)
16
25 16 2
u (0.5) = 0.124975046
.
.
.
i = 20 için
u (5) = 0.00545
elde edilir. Bkz. Çizelge 5.1’ de h =
1
2
ve h =
1
4
değerleri için [ 0, 2] aralığındaki
bilinmeyen fonksiyonun çözüm değerleri verilmiş aynı zamanda analitik değerleri de
yöntemin nasıl işlediği görülmesi açısından eklenmiştir.
Çizelge 5.1 Quadrature metot ile yaklaşık çözümler ve analitik çözüm
Hesaplanan Değerler
x
u1 ( x)
u2 ( x )
u ( x)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
0.25000
0.12444
0.06872
0.04143
0.02690
0.01859
0.01352
0.01026
0.00805
0.00649
0.00536
0.25000
0.12497
0.06924
0.04184
0.02722
0.01883
0.01372
0.01041
0.00818
0.00659
0.00545
0.25000
0.12515
0.06942
0.04197
0.02733
0.01891
0.01378
0.01046
0.00821
0.00662
0.00547
75
Tabloda u1 ( x) ve u2 ( x) çözümleri sırasıyla h =
1
2
ve h =
1
değerlerine karşılık
4
gelen çözümlerdir. u ( x) de analitik çözümdür. Tabloda dikkat edilirse h ’ ı küçük
seçmek daha iyi sonuç vermektedir.
5.2. İkinci Tip Singüler İntegral Denklemler İçin Gauss-Jacobi
Quadrature Formülü
Cauchy çekirdeğine sahip ikinci tip Fredholm integral denklemleri fracture(kırık)
veya contact mekanik problemlerinde sıkça karşımıza çıkar. Bu denklem;
a φ ( x) +
b
π
φ (t )
1
∫ t − x dt = f ( x)
,
( − 1 < x < 1)
(5.4)
−1
şeklinde ifade edilebilir. Burada a ve b sabitler olup f ( x) sürekli bir fonksiyon
olmalıdır. Aynı zamanda bilinmeyen φ ( x) fonksiyonu da sürekli olmalı ve Hölder
şartını sağlamalıdır. Bununla beraber singüler terimin temel değeri [ −1,1] kapalı
aralığında var olmalıdır. −1< x < 1 aralığında bilinmeyen
φ ( x) fonksiyonunun
davranışı
araştırılabilir.
fonksiyonel
analiz
metotları
kullanılarak
Kırık
problemlerinde gerilim kuvvetini artırmak için çatlağın her iki ucunda da bilinmeyen
fonksiyon sonsuza yaklaşır. Yani probleme aşağıdaki ek şart ilave edilmelidir.
φ (±1) = ∞
(5.5)
φ ( x) fonksiyonu duruma göre farklı anlamlar içerir. Örneğin fracture mekaniğinde
karşılaşılan kırık problemlerinde φ ( x ) , kırığın kalınlığı ile ilgili ya da kırık
yüzeylerinin bağıl yer değiştirmesinin türevi olarak tanımlanır. Kontakt mekaniğinde
φ ( x) ise
kontakt yüzeyler etrafındaki dağılmanın ne kadar olduğunu gösterir.
Eş.5.5’ de çatlak yüzeylerin bağıl yer değiştirmesinin türevini ya da aralığın uç
noktalarında sonsuzluğa yaklaşması bitmiş bir kontaktaki dağılmayı gösterir. Eş. 5.4
tipindeki integral denklemlerin analitik çözümlerini elde etmek genellikle zordur.
Bundan dolayı tüm çabalar bu tipteki denklemlerin nümerik hesaplanmasının
76
geliştirilmesine adanmıştır. Birinci çeşit singüler integral denklemelerin nümerik
çözüm metotları, ikinci çeşit singüler integral denklemlerin nümerik çözüm metotları
ile karşılaştırıldığında, ikinci çeşit singüler integral denklemler için daha ileri bir
incelemeye ihtiyaç duyulduğu görülmektedir. Biz burada sadece bilinmeyen
fonksiyonun aralığın her iki sonunda singüler olduğu durumla ilgileniyoruz [6].
5.2.1. Gauss – Jacobi quadrature formülü
Gauss-Jacobi quadrature formülünde φ ( x) fonksiyonu w( x) ağırlık fonksiyonu ve
sınırlı bir bilinmeyen g ( x) fonksiyonunun çarpımı ile ifade edilir. Yani,
φ ( x) = w( x). g ( x)
(5.6)
olup burada,
w( x) = (1 − x)α .(1 + x) β
α = B −1 ,
β =− B
(−1 < α , β < 0 , − 1< x < 1)
, κ = − (α + β ) = 1 , tan π B = −
b
a
(5.7)
şeklindedir. Eş. 5.4 ’de φ ( x) ’ i tam olarak bulmak yerine, Eş. 5.6’daki sınırlı g ( x)
fonksiyonu için çözüm araştırılır. Bu yaklaşım bilinmeyen φ ( x) fonksiyonunun
hesaplamalardaki nümerik hataları önemli ölçüde azaltır. Sabit bir
n tamsayısı
verilsin ve Pn (α ,β ) (t ) ’nin köklerini
Pn (α , β ) (t ) = 0
(5.8)
olacak şekilde ζ i (i = 1, 2,....., n) ile gösterelim. Şimdi bilinmeyen g (t ) fonksiyonunu
ζi
düğüm noktalarındaki değerlerinden yararlanarak Lagrange interpolasyon
formülünden,
77
g (t ) ≈
n
∑
i =1
Pn (α , β ) (t )
g (ζ i )
(t − ζ i ) Pn′(α , β ) (ζ i )
(5.9)
'
şeklinde gösterebiliriz. Burada
sembolü türevini gösterir. Eş. 5.4’ün sol
tarafındaki integral terimini dikkate alır ve Eş. 5.9’da yerine koyarsak,
1
φ (t )
∫t−x
−1
1
dt =
w(t ) g (t )
dt
(t − x)
−1
∫
⎤
Pn (α , β ) (t )
w(t ) ⎡ n
g (ζ i ) ⎥ dt
⎢∑
(t − x) ⎢⎣ i =1 (t − ζ i ) Pn′(α , β ) (ζ i )
⎥⎦
−1
1
=∫
g (ζ i )
(5.10)
w(t ) Pn (α , β ) (t )
=∑
dt
∫
(α , β )
i =1 P ′
(ζ i ) −1 (t − x) (t − ζ i )
n
n
n
=∑
i =1
1
1
1
⎫
Pn (α , β ) (t )
Pn (α , β ) (t )
1 ⎧
(
)
(
)
w
t
dt
w
t
dt
−
⎨
⎬
∫
∫
(t − x)
(t − ζ i )
Pn′(α , β ) (ζ i ) ( x − ζ i ) ⎩ −1
−1
⎭
g (ζ i )
elde edilir. Eş. 5.8’i de kullanırsak,
⎡ a
⎤
Pn (α , β ) (t ).w(t )
1
(α , β )
( −α , − β )
( x) ⎥
∫−1 (t − x) dt = π ⎢⎣ − b w( x) Pn ( x) − sin π a Pn−1
⎦
1
(5.11)
denklemi elde edilir. Burada Pn (α ,β ) (t ) monik Jacobi polinomudur. Eş. 5.9’ un sol
kısmı gerekli sadeleştirmeler yapıldıktan sonra
n
g (ζ i ) Pn (α , β ) ( x)
w(t ) g (t )
a
dt
w
(
x
)
π
=
−
∑
∫ (t − x)
(α , β )
b
i =1 P ′
(ζ i ) (t − ζ i )
−1
n
1
n
+∑
i =1
g (ζ i )
π
(5.12)
⎡ 1
⎤
1
Pn −1( −α ,− β ) (ζ i ) −
Pn −1( −α ,− β ) ( x) ⎥
⎢
sin π a
Pn′(α , β ) (ζ i ) ( x − ζ i ) ⎣ sin π a
⎦
şeklinde yazılabilir. Eş. 5.9’ u da kullanarak Eş. 5.12
78
1
w(t ) g (t )
a
dt = − π w( x) g ( x)
(t − x)
b
−1
∫
g (ζ i )
π
⎡ 1
⎤
1
+∑
Pn −1( −α ,− β ) (ζ i ) −
Pn −1( −α ,− β ) ( x) ⎥
⎢
α
β
(
,
)
sin π a
i =1 P ′
(ζ i ) ( x − ζ i ) ⎣ sin π a
⎦
n
n
(5.13)
şeklinde yazabiliriz. Eş. 5.6 ve Eş. 5.13’ u Eş. 5.4’ de yerine koyarsak
n
∑
i =1
g (ζ i )
π
⎡ 1
1
Pn −1( −α ,− β ) (ζ i ) −
Pn −1( −α ,− β ) ( x)
⎢
(α , β )
−
(
ζ
)
sin
π
sin
π
x
a
a
′
Pn
(ζ i )
i ⎣
⎤
⎥ = f ( x)
⎦
(5.14)
olur. Böylece orijinal Eş. 5.4 denklemi ζ i düğüm noktalarındaki bilinmeyen g (t )
fonksiyonunun değerlerine dayanarak yaklaşık olarak elde edebiliriz. Biz şimdi
sadece sonlu sayıda x = x j şeklindeki noktalarındaki değerleri kullanarak Eş. 5.14’ü
çözmeye çalışalım. x j ’ leri
Pn −1( −α ,− β ) ( x j ) = 0
,
( j = 1, 2,....., n − 1)
(5.15)
şeklinde seçelim. Son olarak Eş. 5.14’ ü aşağıdaki cebirsel sisteme indirgenebilir.
n
w(ζ i )
∑ sin π a ( x
i =1
b
g (ζ i ) = f ( x j )
j −ζi)
Buradan
Pn −1( −α ,− β ) (ζ i )
w(ζ i ) =
Pn′(α , β ) (ζ i )
(5.16)
denklemleri elde edilir. Burada n düğüm noktalı ζ i (i = 1, 2,3,..., n) , Pn (α , β ) (ζ i ) = 0
eşitliğini sağlar. (n − 1) noktalı x j ( j = 1, 2,3,..., n − 1) ’ de Pn −1( −α ,− β ) ( x j ) = 0 şartını
79
sağlar. Böylece Eş. 5.16’nın bu yaklaşık formülü kapalı değildir ve bazı ek şartlara
ihtiyaç duyar. Örneğin; Eş. 5.4 bir sonlandırılmış kontakt olarak tanımlanırsa, denge
şartı ek şart olarak bakılabilir. Kırık problemleri tipindeki örneklerde, muhtemelen
kapanış şartı eklenir. Bu şartın şekli;
y
P
Q = f .P
− a1
x
a1
Şekil. 5.1 Kare uçlu bir matkap elastik yarı düzlemde kayarken
1
P = a1 ∫ φ (t ) dt
(5.17)
−1
dir. Örneğin sonlandırılmış kontakt durumda
P dış güçtür ve
2a1
kontakt
genişliğidir. Çatlağın olmadığı durumda da P = 0 ’ dır. Eş. 5.9’ u Eş. 5.8 ve Eş. 5.11
denklemleri ile birlikte kullanılırsa Eş. 5.17 denklemi
n
∑ w(ζ ) g (ζ ) = −
i =1
i
i
sin π a P
π a1
(5.18)
80
şekline dönüşür. Eş. 5.16 ve Eş. 5.18 denklemleri ikinci tip singüler integral
denklemler için Gauss-Jacobi quadrature formülüdür ve bu denklemler aralığın her
iki sonunda da sonsuza yaklaşan bilinmeyen fonksiyonun çözümünün singüler
davranışının genel durumu için uygulanabilirdir.
5.2.2. Kare uçlu düz matkap
Sertlik problemi olan kare uçlu matkap, yarım genişliği a1 , elastik yarı düzlem
üzerinde kayan bir cisim olarak düşünülebilir(Bkz. Şekil 5.1). Bu problemi yukarıda
verilen nümerik metotlarla çözeriz, fakat dikkat edelim ki bu problemi aynı zamanda
analitik olarak da çözebiliriz. İki farklı yaklaşımdan elde edilen sonuçları
karşılaştırırsak bu konuda tanımlanan nümerik metodun doğruluğunu sınanmış olur.
Matkap sert bir cisim olduğundan yalnızca yarı düzlemin deformasyonuyla
ilgilenilmektedir. Yüzey normal yer değiştirmesi v( x) , normal ve kayma sürtünme
kuvveti de sırasıyla φ ( x) ve g ( x) olsun. O halde
a
1 − 2v
1 − v 1 φ (t )
∂ v( x)
=0
q( x) +
dt =
∫
πμ − a1 t − x
2μ
∂x
(5.19)
şeklinde olup burada v poisson oranı, μ sertlik katsayısıdır.
Çizelge 5.2 Düğüm noktaları ve g (ζ i ) yaklaşık çözümleri
i
ζi
g (ζ i )
1
2
3
4
5
6
7
8
9
10
0.998152341293455
0.982628164674953
0.951605745485052
0.905576080378733
0.845265233707347
0.771624374840183
0.685814873889498
0.589190001797237
0.483273592282616
0.369736011291179
0.317147616466104
0.317146847869753
0.317146880094113
0.317146945994837
0.317147022849993
0.317147009464436
0.317147014630391
0.317146984163095
0.317147026688546
0.317146957580020
81
Çizelge 5.2 (Devam) Düğüm noktaları ve g (ζ i ) yaklaşık çözümleri
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
0.250367814783509
0.127051510791568
1.731871230082485 E-003
-0.123614738279451
-0.247011526863765
-0.366512453580906
-0.480232917685294
-0.586379479991279
-0.683278146666021
-0.769400769550092
-0.843389147127064
-0.904076447810500
-0.950505626208274
-0.981944605084091
-0.997899122911981
0.317147035611473
0.317147061519590
0.317146968408158
0.317146970461946
0.317146998625924
0.317146997607559
0.317146982946921
0.317147001693305
0.317146966910296
0.317147036304250
0.317146985778126
0.317147069680093
0.317146905222412
0.317146965424547
0.317147325416179
Eğer matkap zemin üzerinde kayıyorsa, kayma ve normal sürtünme kuvvetleri
arasında her zaman
q ( x) = f φ ( x)
(5.20)
bağıntısı vardır. Yüzey normal yer değiştirmesi
v( x) ,
− a1 ≤ x ≤ a1 aralığında
sabittir ve böylece Eş. 5.19 denklemi
(1 − 2v)
1 φ (t )
dt = 0
φ ( x) + ∫
2(1 − v)
π −1 (t − x)
1
−f
(5.21)
olur. Çözüm ;
φ ( x) =
sin Bπ
π
(1 − x) B −1 (1 + x) − B
(5.22)
şeklindedir. Eğer dış bileşke kuvveti P = 1 olarak ayarlanırsa burada
tan π B =
−2(1 − v)
f (1 − 2v)
(0 < B < 1)
(5.23)
82
y
P
Q = f .P
− a1
x
a1
Şekil 5.2. Kare uçlu dalgalı matkap elastik bir yarı düzlem üzerinde kayarken
Eş. 5.6’ da sınırlı g ( x) fonksiyonu için açık bir çözüm bulunur. Bu da Eş. 5.22
denklemindeki
g ( x) =
sin Bπ
(5.24)
π
dir ve bu durumda da sabittir. Eş. 5.21 ‘in nümerik çözümü Gauss-Jacobi quadrature
formülünden (Eş. 5.16 ve Eş. 5.18 denklemleri) elde edilen
değerleridir
ve
bu
değerler
Bkz.
Çizelge
5.2
‘de
g (ti ) düğüm
verilmiştir.
Burada
f = − 0.3 , v = −0.3 için hesaplama yapılırsa düğüm noktalarının sayısı n = 25 ’ tir.
Eş. 5.23 ’den ve daha önceden özel olarak belirlenen
B parametresinin değeri
B = 0.4727828 olup analitik çözümü;
g (ζ ) = 0.317146987484391
(5.25)
83
dir. Fonksiyonun hesaplanan düğüm noktasındaki değerleri Bkz. Çizelge 4.1’ de
verilmiştir. Eş. 5.25’ deki analitik sonuçla karşılaştırılırsa, Bkz. Çizelge 5.2’ deki
nümerik sonuçlar çatlak ve kontakt mekanikte karşılaşılan ikinci tür singüler integral
denklemlerinin çözümü için sunulan metotların yeterli olduğu görülür.
5.2.3. Kare uçlu dalgalı matkap
Bu konu içinde tanımlanan metodun gücünü uygulamalarda sık sık karşılaşılan
durumları dikkate alarak göstereceğiz. Matkabın alt tarafı oldukça düzdür,
dengesizdir veya dalgalıdır( Bkz. Şekil 5.2 ). Biz dalgalanmayı kosinüs dalganın tek
periyodu olarak seçeriz. Bu yüzden matkabın şekli;
v( x) = d + ε cos(
πx
a1
)
(5.26)
fonksiyonu ile tanımlanır. Burada ε , küçük bir pozitif parametredir (
ε
a1
< 0.05) . Bu
durum için tam kayma kontakt denklemi ;
0.4
0.35
Dengesiz durum
0.3
0.25
Düz durum
0.2
0.15
0.1
0.05
0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Şekil 5.3 Düz uçlu ve Dalgalı uçlu matkapların karşılaştırılması
0.8
1
84
a
−
1 − 2v
1 1 φ (t )
μ π
π
f φ ( x) + ∫
dt = −
ε sin( x)
a1
2(1 − v)
π − a1 (t − x)
(1 − v) a1
şeklindedir. Önceki örnekte olduğu gibi
genişliği
P
μ
= (0.1)
a1
(1 − v)
(5.27)
f = − 0.3 , v = − 0.3 olsun. Yükün yüzde
ve dalgalanmanın büyüklüğünün değeri
ε
a1
= 0.01 ’ dir.
Eş. 5.27’ nin nümerik çözümü Bkz. Şekil 5.3’ de gösterilen düz olmayan matkap
içindir. İki çözümün kıyaslanmasını yaparsak matkabın şekline bağlı olduğunu
görürüz. Aynı zamanda matkabın kenarındaki singülaritenin doğası korunmaz.
Böylece, bu singüler davranış için ölçekleme parametresi bu iki durum için açıkça
farklıdır [6].
5.3. İkinci Tip Lineer Volterra İntegral Denklemlerinin Trapezoid
Quadrature ve Block-by-Block Metodu ile Çözümü
Lineer Volterra integral denkleminin genel formu aşağıdaki gibidir:
x
u ( x) = f ( x) + ∫ K ( x, y )u (t ) dt a ≤ x ≤ b
(5.28)
a
Eş. 5.28’ deki integralin yaklaşık çözümü için, (a, b) aralığını k > 1 sabiti için
h1 = k hn olacak şekilde h1 , h2 , h3 , ... , hn uzunluğundaki n tane alt aralığa bölerek
genişletebiliriz. Volterra integral denkleminin çözümü için quadrature metodunda
hatalar ilk noktalardan daha çok son noktalardadır. Bu yüzden son aralığın ilk
aralıktan daha küçük olduğuna dikkat edilirse,son noktalarda hatalar azalır [7].
i = 1, 2, 3, ... , n için kα d i −1 şeklinde olup d ve α hesaplanacaktır. Son alt aralığın
uzunluğu α ve diğer durumlarda kα d n −1 olsun. O halde
d=
(
n −1
k
)
−1
şeklinde olup diğer bir ifadeyle, (b − a) ya eşit tüm alt aralıkların uzunlukları toplamı
85
kα + kdα + kd 2α + ... + kd n −1α = b − a
dır. Çünkü 0 < d < 1 olup
α=
(b − a)(d − 1)
k (d n − 1)
h1 = kα
hi = kα d i −1 = dhi −1
,
i = 2, 3, ... , n
Şimdi biz bu iterasyonları tekrarlı trapezoid quadrature ve block-by-block metodları
ile yapacağız.
5.3.1. Tekrarlı trapezoid quadrature metot
2. tip lineer volterra integral denklemlerin çözümü için, yukarıdaki bahsedilenleri ele
alalım.
x
u ( x) = f ( x) + ∫ K ( x, y )u (t ) dt
a≤ x≤b
a
⎧ x0 = a
⎨
⎩ xi = xi −1 + hi , i = 1, 2, 3, ... , n
ve
⎧u ( x0 ) = f ( x0 )
⎪⎪
xj
i
⎨
⎪u ( x1 ) = f ( xi ) + ∑ ∫ K ( xi , t )u (t ) dt ,
j =1 x
⎪⎩
j−1
O halde formülü aşağıdaki gibi yazabiliriz.
u0 = f 0
u1 = f1 +
h1
h
k10u0 + 1 k11u1
2
2
i = 1, 2, 3, ... , n
86
u2 = f 2 +
h1
h
⎛h +h ⎞
k20u0 + ⎜ 1 2 ⎟ k21u1 + 2 k22u2
2
2
⎝ 2 ⎠
u3 = f 3 +
h
h1
⎛h +h ⎞
⎛h +h ⎞
k30u0 + ⎜ 1 2 ⎟ k31u1 + ⎜ 2 3 ⎟ k32u2 + 3 k33u3
2
2
⎝ 2 ⎠
⎝ 2 ⎠
.
.
.
un = f n +
h1
⎛h +h
⎛h +h ⎞
kn 0u0 + ⎜ 1 2 ⎟ kn1u1 + ... + ⎜ n −1 n
2
2
⎝ 2 ⎠
⎝
hn
⎞
⎟ knn −1un −1 + knn un
2
⎠
şeklindedir. Yani ui = u ( xi ), f i = f ( xi ) ve kij = k ( xi x j ) şeklindedir.
x
Örnek: u ( x) = x +
1
xt u (t ) dt ,
5 ∫0
0≤ x≤2
(5.29)
lineer Volterra integral denkleminin tekrarlı trapezoid quadrature metodu ile çözelim.
Bu denklemin analitik çözümü u ( x) =
x3
15
xe
şeklinde olduğunu biliyoruz. Ancak biz
burada tekrarlı trapezoid quadrature kuralı ile çözümünü vereceğiz. Verilenler,
a = 0 ve b = 2 dir.
i = 1, 2, 3, ... , 20
K ( x, t ) = xt
h=
ve
b−a 2−0
=
= 0.1
20
N
f ( x) = x
olduğunu hatırlayalım. Buradan,
x0 = 0
xi = xi −1 + hi
x1 = x0 + h1 = 0,1 , x2 = 0.2
87
u ( x0 ) = f ( x0 ) ⇒ u0 = 0
1 h1
1h
k10u0 + 1 k11u1
52
52
1
1
= 0.1 + (0.1) x1t0u0 + (0.1) x1t1u1
10
10
= 0,1 + (0.01)(0.1)(0.1)u1
u1 = f ( x1 ) +
u1 = 0.10010
h1
h
⎛h +h ⎞
k20u0 + ⎜ 1 2 ⎟ k21u1 + 2 k22u2
2
2
⎝ 2 ⎠
0.1
x2t0u0 + (0.1) x2t1u1 + (0.05) x2t2u2
= 0.2 +
2
u2 = f 2 +
1
1
= 0.2 + (0.1)(0.2)(0.1)(0.100010) + (0.05)(0.2)(0.2)u2
5
5
= 0.2 + 0.000040 + 0.0004u2
u2 = 0.200120
u3 = f 3 +
h
h1
⎛h +h ⎞
⎛h +h ⎞
k30u0 + ⎜ 1 2 ⎟ k31u1 + ⎜ 2 3 ⎟ k32u2 + 3 k33u3
2
2
⎝ 2 ⎠
⎝ 2 ⎠
1
1
1
= 0.3 + (0.1)(0.3)(0.1)(0.10001) + (0.1)(0.3)(0.2)(0.20012) + (0.05)(0.3)(0.3)u3
5
5
5
u3 = 0.300571
.
.
.
u20 = f 20 +
h
h1
⎛h +h ⎞
⎛h +h ⎞
k20,0u0 + ⎜ 1 2 ⎟ k20,1u1 + ... + ⎜ 19 20 ⎟ k20,19u19 + n k20,20u20
2
2 ⎠
2
⎝ 2 ⎠
⎝
u20 = 3.414636
şeklinde olup tüm değerler ve hataları Bkz. Çizelge 5.3’te verilmiştir.
88
Çizelge 5.3 Eş.5.29’i Tekrarlı trapezoid yöntemiyle çözümü(T), Hata değeri(T-hata)
Noktalar
T
T-hata
0
0
0
0.1
0.100010
0.000003
0.2
0.200120
0.000013
0.3
0.300571
0.000030
0.4
0.401764
0.000054
0.5
0.504270
0.000086
0.6
0.608828
0.000126
0.7
0.716367
0.000176
0.8
0.828016
0.000238
0.9
0.945135
0.000315
1.0
1.069350
0.000411
1.1
1.202599
0.000531
1.2
1.347201
0.000683
1.3
1.505934
0.000877
1.4
1.682153
0.001125
1.5
1.879931
0.001446
1.6
2.104246
0.001866
1.7
2.361237
0.002417
1.8
2.658523
0.003146
1.9
3.005644
0.004119
2.0
3.414636
0.005426
5.3.2. Değişken adımlı block-by-block metodu
Block-by-block metodu lineer Volterra integral denklemlerinin çözümü için en iyi
yöntemdir. Aşağıdaki sistemle lineer Volterra integral denklemlerinin çözümünü
yapabiliriz.
u0 = f 0
89
u1 = f1 +
5h
8h
h
k10u0 + k11u1 − k12u2
12
12
12
h
4h
h
u2 = f 2 + k20u0 +
k21u1 + k22u2
3
3
3
h
4h
2h
4h
h
u3 = f3 + k30 u0 +
k31 u1 + k32u2 +
k33 u3 − k44 u4
3
3
3
3
3
(5.30)
.
.
.
h
4h
8h
h
u2 n −1 = f 2 n −1 + k2 n −1,0 u0 + k2 n −1,1 u1 + ... + k2 n −1,2 n −1 u2 n −1 − k2 n −1,2 n u2 n
3
3
12
12
h
4h
4h
h
u2 n = f 2 n + k2 n ,0 u0 +
k2 n ,1 u1 + ... + k2 n ,2 n −1 u2 n −1 + k2 n ,2 n u2 n
3
3
3
3
burada h =
b−a
dır. Trapezoid quadrature metoduna benzer bir şekilde bir
2n
yaklaşımla Eş. 5.30 sistemi yerine aşağıdaki sistem elde edilir.
u0 = f 0
u1 = f1 +
5h1
8h
h
k10u0 + 1 k11u1 − 1 k12u2
24
24
24
u2 = f 2 +
h1
4h
h
k20u0 + 1 k21u1 + 1 k22u2
6
6
6
u3 = f3 +
h1
4h
5h
h
⎛ h 5h ⎞
k30u0 + 1 k31u1 + ⎜ 1 + 2 ⎟ k32u2 + 2 2 k33u3 − 2 k34u4
6
6
24
24
⎝ 6 24 ⎠
.
.
.
u2 n −1 = f 2 n −1 +
u2 n = f 2 n +
8h
h
h1
4h
k2 n −1,0u0 + 1 k2 n −1,1u1 + ... + n k2 n −1,2 n −1u2 n −1 − n k2 n −1,2 n u2 n
6
6
24
24
4h
h
h1
4h
k2 n ,0u0 + 1 k2 n ,1u1 + ... + n k2 n ,2 n −1u2 n −1 + n k2 n ,2 nu2 n
6
6
6
6
sistemini elde etmiş oluruz.
(5.31)
90
Örnek: Eş. 5.29 denkleminin çözümünü block-by-block metoduyla inceleyelim.
Bulduğumuz sonuçları analitik çözümle karşılaştıralım Eş. 5.29 denklemimiz
x
u ( x) = x +
1
xt u (t ) dt ,
5 ∫0
şeklinde olup burada;
0≤ x≤2
K ( x, t ) = xt
ve
b=2
değerleri verilmiştir. O halde
formülleri kullanırsak;
u0 = f 0 = 0
u1 = f1 +
5h
8h
h
k10u0 + k11u1 − k12u2
12
12
12
u1 = (0.1) +
1 5(0.1)
1 8(0.1)
1 (0.1)
(0.1)(0) (0) +
(0.1)(0.1) u1 −
(0.1)(0.2) u2
5 12
5 12
5 12
(0.999866666) u1 + (0.000033333) u2 = 0.1
(5.32)
elde edilir. Diğer denklemden;
h
4h
h
u2 = f 2 + k20u0 +
k21u1 + k22u2
3
3
3
u2 = (0.2) +
1 (0.1)
1 4(0.1)
1 (0.1)
(0.2)(0)(0) +
(0.2)(0.1) u1 +
(0.2) (0.2) u2
5 3
5 3
5 3
(0.000533333) u1 + (0.9997333333) u2 = 0.2
elde edilir. Eş. 5.32 ve Eş.5.33 beraber çözülürse;
u1 = 0.100007
ve
u2 = 0.200107
değerleri bulunur. Bu şekilde devam edilirse benzer işlemler yapılarak
(5.33)
91
.
.
.
u20 = 3.409210
bulunur. Aşağıdaki tabloda tüm değerler ayrıntılı olarak verilmiştir ve ayrıca
hatalarına dikkat edilirse çok küçük değerler olduğu görülür. Bu da metodumuzun
çok iyi çalıştığını gösterir [7].
Çizelge 5.4 Eş. 5.29 ‘i block-by-block yöntemi ile çözümü(B),Hata değeri(B-hata)
Noktalar
B
B-hata
0
0
0
0.1
0.100007
-2.890316 E-09
0.2
0.200107
3.557610 E-09
0.3
0.300540
-7.851064 E-08
0.4
0.401710
2.851652 E-08
0.5
0.504184
-3.712513 E-07
0.6
0.608703
9.664237 E-08
0.7
0.716190
-1.066664 E-06
0.8
0.827778
2.305046 E-07
0.9
0.944818
-2.454951 E-06
1.0
1.068940
4.527011 E-07
1.1
1.202063
-5.056587 E-06
1.2
1.346518
7.796112 E-07
1.3
1.505047
-9.862559 E-06
1.4
1.681029
1.198285 E-06
1.5
1.878465
-1.881378 E-05
1.6
2.102382
1.596792 E-06
1.7
2.358784
-3.579639 E-05
1.8
2.655379
1.570539 E-06
1.9
3.001456
-6.877889 E-05
2.0
3.409210
-9.970176 E-08
92
KAYNAKLAR
1. Aksoy, Y., “İntegral Denklemler, Cilt I.”, Y.T.Ü Yayınları, İstanbul, 13-66 (1998)
2. Bayraktar , M., “Fonksiyonel Analiz” , Gazi Kitabevi, Ankara (2005)
3. Musayev, B. , Alp, M. , “Fonksiyonel Analiz” , Balcı Yayınları, Kütahya (2000)
4. Delves, L.M., Mohammed, J. L. , “Computational methods for integral
equations”, Cambridge University press, Cambridge, 115–119 (1992)
5. Krasnov, M., Kıselev, A. , Makeronko, G. , “ İntegral Denklemler”,
İstanbul, (1976)
6. Ma, L. , Korsunsky, A.M. , “ A note on the Gauss-Jacobi quadrature formulae for
singular integral equations of the second kind” , İnternational Journal of
fracture, 126: 399–405 (2004)
7. Saberi-Nadjafi, J., Heidari, M. , “ A quadrature method with variable step for
solving linear Volterra integral equations of second kind” , Applied mathematics
and Computation, 188: 549–554 (2007)
93
ÖZGEÇMİŞ
Kişisel Bilgiler
Soyadı, adı
: EKİCİ, Mustafa
Uyruğu
: T.C.
Doğum tarihi ve yeri
: 19.02.1984 Tortum
Medeni hali
: Bekar
E-mail
: matematikci984@hotmail.com
Eğitim
Derece
Eğitim Birimi
Mezuniyet tarihi
Lisans
Atatürk Üniversitesi/ Matematik Bölümü
2008
Lise
Akçaabat Lisesi Y.D.A
2002
Yabancı Dil
İngilizce