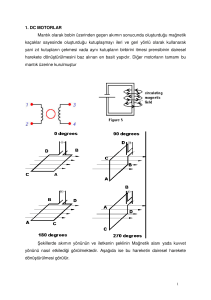
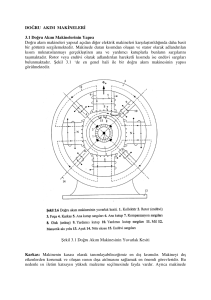
Bir Elektrik Motorunun Kısımları
Bir elektrik motorunun parçaları: Rotor, stator içinde döner.
İki kutuplu bir DA motoru
2-kutuplu makinanın kısımları ve elemanları
2
Dört kutuplu bir DA motoru-endüktör
Kutup nüvesi
Sargılı bir kutup
Bir DA motorunun endüvisi
Bir DA makinasının endüvi elemanları
4
Bir DA motorunun endüvisi
Bir DA makinası endüvü sargıları
(a) Paralel sarım ve paralel kol devresi
(b) Seri sarım ve paralel kol devresi
Bir DA motorunun endüvisi ve fırçaları
DA makinasının kollektörü, 2 ve 4-kutup için fırçalar
AA generatörlerinin çalışma esasları
N
fırça
ω
x
A
manyetik
akı
y
yük
Basit bir AA
generatörü
sargı
B
bilezik
S
Exy
Exy
Em
Em
0o
-Em
90o
180o
π
270
o
360o
2π
0
açı
0.25
0.5
-Em
0.75
1.0
zaman,
saniye
1
1 saykıl
DA generatörlerinin çalışma esasları
N
mıknatıs
x
ω
A
manyetik
akı
yük
y
B
Basit bir DA
generatörü
sargı
fırça
kollektör
S
Exy
Em
0
90
180
270
360
450
açı,
derece
Dalga şeklinin iyileştirilmesi
4-sargılı ve 4-kollektör dilimli bir DA generatör
Exy
Em
0
0
90
180
270
360
450
açı,
derece
Fırçaların konumu
Yüklü Generatör: Enerji çevirme işlemi
Endüvi reaksiyonu ve komutasyon
nötr ekseni
x
N
x
S
mmkf
mmka
y
y
Sadece endüviden akımın geçmesi
Sadece alan sargısı
dönüş yönü yeni nötr ekseni
x
S
N
mmk
y
Hem alan sargısı uyartımlı
hem de endüviden akım
geçmekte
Endüvi reaksiyonunun iyileştirilmesi:
•Fırçaları kaydırmak
•Komutasyon kutupları kullanmak
Generatör özellikleri
• Bir generatörün üzerindeki etiket;
güç, gerilim, devir sayısı ve makina
hakkındaki diğer ayrıntıları gösterir.
Bu
özellikler
veya
anma
karakteristikleri
üretici
firma
tarafından garanti edilir. Örneğin,
12.5 kW bir generatörün etiketinde
şu bilgiler vardır.
• Güç 12.5 kW
• Endüvi Gerilimi 495 V
• Uyartım Gerilimi 300 V
• Devir Sayısı 1500 d/d
Generatör özellikleri
• Endüvi Akımı 29.9 A
• Uyartım akımı 2.18 A
• Yalıtım Sınıfı
F
İzolasyon
sınıfı
A
E
B
F
H
Max. Sargı
Sıcaklığı (oC)
105
120
130
155
180
Max. Isınma Isınma toleransı
(oC)
(oC)
60
5
75
5
80
10
105
10
125
15
DA generatörlerinin elektrik devre modelleri ve karakteristikleri
Endüvi sargıları alan akısına göre sabit bir hızda döndürülür ise,
manyetik akı:
λ (t ) = − Nφ cos ωt
N sargı sarım sayısı, φ bir kutup akısı, ω açısal hız (rad/s).
Endüklenen gerilim ise Faraday Kanununa göre;
dλ
= Nωφ sin ωt
e(t ) =
dt
Endüklenen sinüsoidal gerilim kollektörler vasıtasıyla doğrultulur ve
ortalama değeri:
E av =
1
π
e(t )dωt
∫
π
0
E av =
2 Nφω
π
1
DA generatörlerinin elektrik devre modelleri ve karakteristikleri
Endüvi iletkeni sayısı "Z" ve paralel kol sayısı "a" ise, paralel koldaki iletken sayısı:
N=
Z
2a
Endüklenen gerilim:
Z n pφ
Eg =
60a
Z, p, a sabittir.
Endüklenen gerilim:
E g = K gφ ω
Uyartım akımı ile akının değişiminin doğrusal olduğu durumlar için
Endüklenen gerilim:
E g = KωI f
2
Endüvi ve uyartım devresi modelleri
+
+
Ia
If
Ra
+
Eg
Vf
Va
Rf
_
_
_
endüvi devresi modeli
uyartım devresi modeli
Endüvi çıkış uçları gerilimi Va, akımı ise Ia ile temsil edilir.
Generatör için endüvi çıkış gerilimi denklemi;
Va = E g − I a Ra
3
Endüvi ve uyartım devresi modelleri
+
Endüvi çıkış gücü:
Ia
Ra
Va I a = E g I a − I a2 Ra
+
Eg
Pa = Pin − I a2 Ra
Va
_
_
endüvi devresi modeli
LP11
4
Generatör bağlantıları
DA generatörler alan (uyartım) gerilimi kaynağına göre sınıflandırılır:
• Yabancı uyartımlı
• Kendinden uyartımlı
Yabancı uyartımlı generatörler
Ia
+
Ra
If
+
IL
+
Vf
Rf
Eg
Va= VT
RL
_
_
_
uyartım devresi modeli
endüvi devresi modeli
yük
5
Yabancı uyartımlı generatörler
Ia
+
Ra
If
IL
+
+
Rf
Vf
Eg
Va= VT
RL
_
_
uyartım devresi modeli
VT
Eg
_
yük
endüvi devresi modeli
boş çıkış gerilimi
IaRa
Endüvi reaksiyonu
anma çıkış gerilimi
Anma yük akımı
IL
Yabancı uyartımlı generatörün yük eğrisi
6
Kendinden uyartımlı generatörler
1 Seri generatör: Alan sargıları endüvi devresine seri bağlıdır.
Uyartım akımı endüvi akımıyla aynıdır.
2. Şönt generatör: Alan sargıları endüvi devresine paralel (şönt)
bağlıdır. Alan gerilimi ile endüvi gerilimi aynıdır.
3. Kompunt generatör: Bu durumda iki adet alan sargısı
kullanılır. Endüviye seri bağlanan seri alan sargısı büyük kesitli
iletkenlerden sarılır. Endüviye paralel bağlanan Şönt alan
sargısı ise ince kesitli iletkenlerden sarılır.
7
Seri generatörler
Rs
VT = E g − I a ( Ra + Rs )
I f = Ia
Ia
+
Ra
+
Va
Eg
E g = KωI a
VT = [Kω − ( Ra + Rs )]I a
_
_
VT
Seri generatörün yük eğrileri
VT
VT
Ia
(a) ideal
Ia
(b) gerçek
8
Şönt generatörler
VT = E g − I a Ra
Ia
Ra
+
IL
If
+
IL = Ia − I f
VT
If =
Rf
VT
E g = Kω
Rf
Rs
Va
Eg
VT
h
_
_
VT
Anma yük gerilimi
Anma yük akımı
şönt generatörün yük eğrisi
IL
9
Şönt generatörlerde gerilim
Adım 1:Tahrik makinası DA generatörü anma devrinde döndürürse,
artık mıknatısiyetden dolayı endüvide Ego gerilimi üretilir.
Bunun sonucu uyartım akımı sıfır değerinden I fo = E go / R f
değerine ulaşır
Adım 2:Üretilen gerilim Ego dan Eg1 değerine yükselir. Çünkü mmk
sıfırdan NfIfo değerine yükselmiştir.
Adım 3: I f 1 =
E g1
Rf
olduğu için uyartım akımı If0' dan If1
değerine yükselmiştir.
Adım 4:Akımın If1 'e yükselmesi ile üretilen gerilim Eg2 değerine
yükselir.
…….
Bu işlem aynı şekilde nüve doyuncaya kadar devam eder.
10
Şönt generatörlerde gerilim
Va
Va
Rc
Rf1 Rf2 Rf3
Eg
Eg2
4
Eg
3
Eg
2
1
If0 If1 If2
If3
If
Şönt generatörün endüvi uç gerilimi
VT
If
Alan direncinin üretilen gerilime etkisi
VT
Rf1> Rf2 > Rf3
Rf1
Anma yük gerilimi
Rf2
Rf3
Anma yük akımı
If
Şönt generatörün alan direnci eğrisi
IL
şönt generatörün yük eğrisi
11
Kompunt generatörler
Rs
Rs
Ia
Ra
If
IL
+
If
IL
+
+
+
Va
Eg
Ia
Ra
Rsh
VT
Eg
Va
Rsh
VT
_
_
_
_
(a) uzun şönt alan (uyartım)
(b) kısa şönt alan (uyartım)
Şönt uyartım doğrudan endüvi uçlarına paralel bağlanırsa ve seri alan sargısı
endüvi-şönt uyartım sargıları uçlarına seri olarak bağlanırsa "kısa şönt kompunt"
bağlantı elde edilir.
İki alan sargısı bağlantısı akıları birbirini kuvvetlendirecek yönde yapılırsa, bu
makinaya "artırmalı kompunt“, iki alan sargısı akıları birbirini azaltacak (yok
edecek) yönde bağlanırsa, bu makinaya "farklı veya azaltmalı kompunt" denir.
12
Kompunt generatörler
kısa şönt generatör
Va = E g − I a Ra
uzun şönt generatör
VT = E g − I a ( Ra + Rs )
Va
If =
Rsh
VT
Rsh
If =
IL = Ia − I f
E g = Kω φ
VT
φ = K s I a + K sh I f
φ = K s I L + K sh I f
aşırı
Rs
Rs
Ia
Ra
If
IL
+
If
IL
Va
Rsh
VT
Eg
artırmalı
kompunt
düşük
+
şönt
+
+
Eg
Ia
Ra
düz
Va
Rsh
VT
azaltmalı
kompunt
_
_
_
_
(a) uzun şönt alan (uyartım)
(b) kısa şönt alan (uyartım)
Prof. Dr. Güngör Bal, gunbal@gazi.edu.tr
IL
Kompunt generatörlerin yük karakteristikleri
Gazi Üniversitesi
13
DA generatörlerinin paralel bağlanması
DA güç sistemlerinde bazen birden fazla generatörün paralel
bağlanması ve böylece güç sisteminin beslenmesi gerekebilir. Bu
işleme iki ana nedenden dolayı gerek duyulur:
1. Yüke, bir generatörün sağlayabileceği güçten daha fazla güç
gerekebilir.
2. Yüklere aktarılan güç kesilmeksizin bir generatör bakıma veya
tamire alınabilmelidir.
14
DA generatörlerinin paralel bağlanması
İki generatörün paralel bağlanabilmesi için:
1. Bir generatörün pozitif çıkış ucu diğer generatörün pozitif
ucuna bağlanmalıdır.
2. Generatörler paralel bağlanmadan önce çıkış gerilimlerinin eşit
olmasına dikkat edilmelidir.
15
Şönt generatörlerinin paralel bağlanması
+
A1
Ra1
+
A2
I1
+
Ra2
I2
IL
+
Rsh2
Rsh1
Eg1
yük
VT1
VT2
_
Eg2
_
Generatör-1
I1 (A)
Generatör-2
VT
Generatör-1
Generatör-2
I1
I2
I2 (A)
IL= I1+ I2
Çıkış karakteristikleri aynı olan paralel bağlı şönt generatörler yükü eşit olarak paylaşırlar.
Prof. Dr. Güngör Bal, gunbal@gazi.edu.tr
Gazi Üniversitesi
16
Şönt generatörlerinin paralel bağlanması
VT
If1 veya ω1 artırılır ise
V'T
VT
Generatör-1
I1 (A)
I'1
Generatör-2
I'2
I1
I2
I2 (A)
IL= I'1+ I'2
Paralel bağlı şönt generatörlerin yük paylaşımları.
Generatör-1’in hızı veya uyartım akımı yükseltilmiştir.
17
DA motorlarının elektrik devre modelleri
Sargılar
1
DA motorlarının elektrik devre modelleri
Endüvi devresi modeli
Va = E c + I a Ra
E c = K 1φ f ω
Endüvi devresine giren güç:
+
Ia
Pai = Va I a
Ra
+
Va
Endüvide üretilen güç:
Ec
Pa = Ec I a
_
Net çıkış gücü:
Po = Pa − Prot
Net çıkış torku:
Po
To =
ω
_
endüvi devresi modeli
ω = 0 ise Ec = 0 olur.
2
Uyartım devresi modeli
φ f = K2 I f
+
If
Vf
If =
Rf
Vf
Rf
E c = K 1φ f ω
Ec = K1 K2 I f ω
_
3
Motor bağlantıları
DA motorları da DA generatörleri gibi alan (uyartım) sargısının
beslenmesine göre sınıflandırılırlar.
Kendinden uyartımlı motorlar-Seri motorlar
Rs
IL = Ia = Is = I f
VT = Va + I a Rs
VT = Ec + I a ( Ra + Rs )
Ec = K1 K2 I a ω
IL
+
Ia
If = IS
Ra
+
+
seri alan
sargısı
VT
Va
Ec
_
_
_
uyartım devresi
endüvi devresi modeli
4
Seri motorlar
Endüvi Güç-Akım (Pa-Ia) Karakteristiği
Rs
Endüvide üretilen güç:
IL
+
Ia
If = IS
Ra
Pa = Ec I a
seri alan
sargısı
VT
Pa = [VT − I a (Ra + Rs )]I a
(Ra + Rs )I
+
+
Va
Ec
_
_
_
2
a
uyartım devresi
− VT I a + Pa = 0
VT ± VT2 − 4 Pa (Ra + Rs )
Ia =
2(Ra + Rs )
I am =
endüvi devresi modeli
VT
2(Ra + Rs )
VT − 4 Pa (Ra + Rs ) = 0
∂Pa
= VT − 2(Ra + Rs )I a = 0
∂I a
VT2
=
4(Ra + Rs )
VT − VT2 − 4 Pa (Ra + Rs )
Ia =
2(Ra + Rs )
2
Pam
5
Seri motor için güç-akım karakteristiği
P
Pa
Pam
Pom
Pam
anma gücü
Prot
döner
kayıplar
Pa
Po
normal
çalışma
bölgesi
anma
yük akımı
Iam
Seri motorun endüvisinde üretilen gücün
yük akımı ile değişimi
Ia
Ia
Iam
Seri motorun endüvisinde üretilen güç ve
çıkış gücünün yük akımı ile değişimi
Pa = [VT − I a (Ra + Rs )]I a
Endüvi ve seri alan dirençleri ihmal edilirse, Ia akımının yaklaşık değeri:
Pa
Ia ≅
VT
6
Seri motor için akım ile moment ve hızın değişimi
Ta
Endüvide üretilen moment (iç moment):
Ta =
Pa
ω
Ta = K1 K2 I a2
doğrusal
değişim
karesel
değişim
Ia
Seri motor endüvi momenti-akımı ilişkisi
ω
VT = K1 K2 I a ω + I a (Ra + Rs )
ω=
R + Rs
VT
− a
K1 K2 I a
K1 K2
Ia
Seri motor yük akımı-hız ilişkisi
7
Seri motor için hız-moment eğrisi
Endüvi akımı, açısal hız ile tanımlanabilir:
Ta
VT
Ia =
K1 K 2ω + ( Ra + Rs )
K1 K2VT2
Ta =
[ K1 K2ω + ( Ra + Rs )]2
ω
Seri motorun moment-hız eğrisi
Prof. Dr. Güngör Bal, gunbal@gazi.edu.tr
Gazi Üniversitesi
8
Seri motor için akım ile moment ve hızın değişimi
Yolverme (Başlama):
Motor dururken, motor devir sayısının ve zıt emk'in sıfır olduğu açıktır.
Endüvi devresine sabit kaynak geriliminin uygulanması çok yüksek akım
ile sonuçlanacaktır. Ec=0 iken başlama akımı:
I a ,st =
VT
Ra + R s
Başlama akımını sınırlamak için iki tedbir alınabilir.
• Birincisi ve en gerçekcisi olanı motora ayarlı DA gerilim
kaynağından azaltılmış gerilim uygulamaktır.
• İkincisi ve klasik olanı ise akım değerini kabul edilebilir sınırda
tutacak yolverme (starting) direnci (Rst) kullanmaktır.
Bu direnç ayarlı olup motor devir sayısı arttıkça devreden çıkarılarak sıfır yapılır.
Motor, yolaldıktan sonra eğer motor direnci devrede bırakılırsa, motor düşük devir
(performans) ile çalışacaktır.
9
Seri motor- Güç kayıpları ve verim
Pl = I a2 ( Ra + Rs ) + Prot
Pin = VT I a
η=
Po = Pin − Pl
Po
Pin
Endüvi akımı arttıkça maksimum verime ulaşıncaya kadar verim de artar.
Akımın daha fazla artırılmasıyla verim düşer.
Maksimum verime karşılık gelen endüvi akımını bulmak için endüvi akımına
göre verimin türevi sıfıra eşitlenir.
dη
=0
dI a
Pin
∂P
Pin o
dI a
∂Pl
∂P
= Pl in
∂I a
∂I a
∂P
− Po in = 0
∂I a
∂Pin ∂Pl
Pin
−
∂I a ∂I a
∂Pin
= VT
∂I a
∂Pl
= 2 I a (Ra + Rs )
∂I a
[
2VT I a 2 (Ra + Rs ) = VT I a 2 (Ra + Rs ) + Prot
∂P
− (Pin − Pl ) in = 0
∂I a
]
10
Seri motor için akım ile moment ve hızın değişimi
Maksimum verim şartı:
Prot = I a (Ra + Rs )
2
Döner kayıplar olarak temsil edilen sabitlenmiş kayıplar ve
2
Ia R
ile temsil edilen sargı kayıpları birbirine eşit olduğunda verim
maksimum olur.
I a ,max =
η max
Maksimum verim:
Döner kayıpların,
endüvi ve seri alan sargı dirençlerinin ve
terminal (uç) geriliminin fonksiyonudur.
Prot
Ra + Rs
Pin,max − 2 Pl
=
Pin,max
veya
η max = 1 −
2[Prot (Ra + Rs )]
VT
1
2
Motorun maksimum verim değeri terminal
gerilimin artırılması veya endüvi ve seri
alan dirençlerinin azaltılması ile
artırılabilir.
11
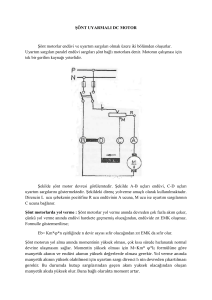
DA şönt motorlar
VT = Va = Vf
+
IL
Ia
Ra
If
+
IL = Ia + I f
VT = Va = Ec + I a Ra
VT
Ec = K1 K2
ω
Rf
Ec = K shω
Rf
Vf
VT
VT
If =
Rf
+
_
Va
Ec
_
_
uyartım devresi
endüvi devresi
VT
K sh = K1 K2
Rf
12
Şönt motor için endüvi güç-akım karakteristiği
Endüvide üretilen güç:
Pa = Ec I a
Pa = (VT − I a Ra ) I a
Seri motor endüvi gücünde Rs=0 yapılırsa, şönt motor endüvi güç denklemine eşit olur.
[VT − I a (Ra )]I a ⇒ [VT − I a (Ra + Rs )]I a
Şönt motor endüvi gücü
seri motor endüvi gücü
VT ± VT2 − 4 Pa Ra
Ia =
2 Ra
13
Şönt motor için endüvi güç-akım karakteristiği
Endüvide üretilen gücün maksimum değeri;
Pa
2
Pa ,max =
VT
4 Ra
I a ,max =
VT
2 Ra
Pam
anma gücü
VT − VT2 − 4 Pa Ra
Ia =
2 Ra
normal
çalışma
bölgesi
anma
yük akımı
Ia
Iam
şönt motorda endüvi gücü-akımı ilişkisi
Pa = (VT − I a Ra ) I a
I a Ra = 0
Pa
Ia ≅
VT
14
Şönt motor için endüvi akımı-hız karakteristiği
Ta
Endüvide üretilen moment:
Pa
Ta =
ω
Ta = K sh I a
ω
Ia
Endüvide akımı ile hız terimi:
VT − I a Ra
ω=
K sh
VT
I a = 0 ise ωo =
Ksh
Ra
ω = ωo −
Ia
K sh
ωo
Anma hızı
Anma akımı ve
momenti
şönt motorda hız-endüvi akımı ilişkisi
15
Ia, Ta
Şönt motor için moment-hız karakteristiği
Endüvide üretilen moment-hız ilişkisi:
Pa
Ta =
ω
K sh
(VT − Kshω )
Ta =
Ra
K sh2
(ω o − ω )
Ta =
Ra
VT Ta Ra
− 2
ω=
K sh K sh
Ta Ra
ω = ωo − 2
K sh
ω
ωo
Anma hızı
Anma akımı ve
momenti
Ta
şönt motorda hız-endüvi akımı ilişkisi
16
Şönt motor-Güç Kayıpları ve Verim
Motorun giriş gücü:
Pin = VT I L
Yük akımı:
Motorun çıkış gücü:
Po = VT I a − I a2 Ra − Prot
IL = Ia + I f
Pin = VT I a + P f
+
IL
Ra
2
V
P f = T = Vf I f
Rf
Ia
If
+
+
Rf
Vf
VT
Va
Ec
_
_
_
uyartım devresi
endüvi devresi
17
Şönt motor için moment-hız karakteristiği
Motorun verimi:
Po
η=
Pin
Maksimum verim durumu:
dη
=0
dI a
Maksimum verim şartı:
(VT I a + Pf ) (VT - 2 I a Ra ) - (VT I a - I a2 Ra - Prot )VT =
0
Ra I a2 + 2 I a I f Ra − ( Prot + P f ) = 0
Ra I a2,max ≅ Prot + P f
∂Po
∂Pin
Pin
− Po
=0
∂I a
∂I a
∂Po
= VT − 2 I a Ra
∂I a
∂Pin
= VT
∂I a
18
DA motorları
• Yük seçimi
• Devir yönü değiştirme
• Yol verme
Prof. Dr. Güngör Bal, gunbal@gazi.edu.tr
Gazi Üniversitesi
1
DA motorları-Yük karakteristikleri
DA motorların moment-hız karakteristikleri motor bağlantılarına göre değişir
Seri motor:
Ta =
K 1 K 2VT2
[K1 K 2ω + ( Ra + Rs )]2
E c = K1 K 2 I a ω
Şönt motor:
Ksh2
(ωo − ω )
Ta =
Ra
VT
ωo =
Ksh
E c = K shω
Arttırmalı kompunt motor:
Ta
Ec
VT − K1 K 3 I sh ω
(VT − K1 K 3 I sh ω) 2
K1 K 3 I sh
+ K4
2
R
+
R
+
K
K
ω
(
R
+
R
+
K
K
ω
)
a
s
a
s
1 4
1 4
K1 ( K 3 I sh + K 4 I a ) ω
2
Mekanik yüklerin hız-moment karakteristikleri
Sabit momentli yük: Çalışma hızı aralığınca momenti
değişmeyen yüklerdir. Konveyör (nakledici, taşıyıcı),
T
T ∝ ω2
T∝ω
öğütücü, haddane ve vinç-asansör uygulamaları sabit
momentli yüklere örnek verilebilir.
Hızla orantılı olarak momenti değişen yük: Bu tip
Sabit moment
yüke örnek olarak silindirler arasından kağıt ve
kumaşların
geçirilerek
perdahlanması
veya
düzeltilmesinde kullanılan makinalar verilebilir.
Sabit güç
Sabit güçlü yük: Momenti, çalışma hızı ile ters orantılı
olarak değişen yüklerdir. Dairesel testereler ve torna
ω
motorlar bu tip yüklerdendir.
Momenti hızın karesiyle orantılı olarak değişen yük:
Mekanik yüklerin genel moment-hız karakteristikleri
Moment isteği hızın karesiyle artan yüklerdir. Santrafüj
vantilatör, komproser ve üfleyicilerin yanı sıra ısıtmada,
vantilasyonda ve klimalarda kullanılan bütün hava ile
ilgili fanlar bu tip yüklerdendir.
3
Yük Karakteristikleri
Tipik yük karakteristikleri
Bir DA motoru ve
sürücüsü kullanırken,
yükün güç, tork ve hız
karakteristiklerini bilmek
gerekir.
Sabit Güçlü Yükler:
Hız artarken yük azalır.
Güç sabit kalır.
Sabit Torklu Yükler:
Yük hızla değişmez.
Hız artarken güç
doğrusal olarak artar.
Değişken Torklu Yükler:
Hız artarken yük artar.
Güç hızla doğrusal
olmayan bir şekilde yüke
bağlı olarak değişir.
4
Motor-Yük eşleşmesi
Genel olarak yükün moment-hız karakteristiği:
T
TL = f L (ω )
yük
Yük ve motorun moment-hız karakteristiklerinin
T*
motor
kesiştiği nokta, motor ve yükün uyumlu olarak
çalışabilecekleri moment T* ve karşılığı olan hız ω*
değerlerini verir.
ω
ω*
Motorun bir yükü sürebilmesi için:
•Motor
başlangıç
momentinin
yükün
başlangıç
Motor ve yükün moment-hız karakteristiklerinin uyumu
momentinden büyük olması,
•Motor ve yükün hız moment karakteristiklerinin anma
hızı içinde kesişmesi gerekir.
5
DA motorları-Devir yönünün değiştirilmesi
DA motorlarda devir yönünü değiştirmek için:
• Endüvi akımının yönünü
veya
• Alan akımının yönünü değiştirmek gerekir.
Her iki devrenin (endüvi ve alan) akımlarının yönlerini
değiştirmek devir yönünü değiştirmez.
Genel kural olarak endüvi devresi akımının yönünü değiştirmek
tercih edilir.
Çünkü alan sargısı endüktansı yüksektir ve alanda depolanan
enerjiyi harcamadan yapılacak olan yön değiştirme işlemi tehlikeli
olabilir.
6
DA motorları-Devir yönünün değiştirilmesi
+
IL
+
Uyartım
(alan)
devresi
_
Şönt
Seri
Kompunt
bağlantı
VT
Ia
Ra
+
Ec
_
_
ileri yönde dönme
_
IL
+
VT
_
Ia
Uyartım
(alan)
devresi
Ra
_
Şönt
Seri
Kompunt
bağlantı
Ec
+
+
ters yönde dönme
7
DA motorları-Dört çalışma bölgesi
BÖLGELER
BİRİNCİ
İKİNCİ
ÜÇÜNCÜ
DÖRDÜNCÜ
Yük çekme
Yükün motoru
yenmesi
Yük indirme
Frenleme
Motor
Generatör
Motor
Generatör
(VT-Ec) ve Ia
+
-
+
-
Pa
+
-
+
-
T
+
+
-
-
ω
+
-
-
+
EYLEM
Çalışma Durumu
8
DA motorları-Dört çalışma bölgesi
Dört-bölge çalışma:
Belirli yüklerin dinamikleri dörtbölge çalışmayı gerektirir. Dönen bir
motorun gerilimi aniden azaltılırsa,
yük ataletinden dolayı motor negatif
tork üretir. Motor bir generatör gibi
davranır. Şaftındaki mekanik enerjiyi
elektrik enerjisine çevirir. Bu ilave
güç sürücüye geri döndürülür.
Bu olay, bir aracın yokuş aşağı
sürülürken motorunun firen olarak
kullanılmasına benzerdir. Frenleme
II ve IV bölgelerinde meydana gelir.
9
DA motorları-Yol verme
r1
r2
r3
rn-1
rn
V=
Ec + I a Ra
a
Ia
Ra
+
ω =0 ⇒ Ec =0
+
VT
Ec
_
Ia =
st
Va
Ra
R
_
ω
R1
Motor anma hızı
r1
R2
r2
R3
r3
R4
r4=Rm
0
t1
t2
t 0
t3
t1
t2
t1
t2
t
t3
Ia
Ec
Imax
E3f
Imin
E2f
E1f
t1
t2
t3
t
0
t3
t
10