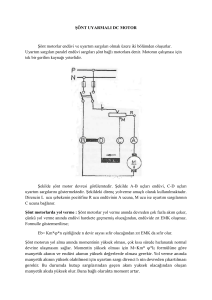
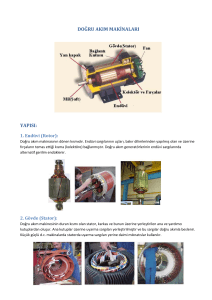
Şönt Motorlar
Uyartım sargısı endüviye paralele olarak bağlanmış dc motorlardır. Paralel bağlanması sayesinde motoru tek bir kaynakla
çalıştırabilmekteyiz. Motor kutup sargıları çok spirli ve ince kesitli iletkenden yapılmıştır. Motor endüvi uçları A-B Uyartım
sargısı uçları D-C harfleri ile gösterilmiştir.
Armatür gerilimi: E = k.Ø.n
Toplam akım: I=If + IE
Endüvi akımı: IE=(UE-E)/RE
Toplam Gerilim: UE= RE x IE + E
2
2
Güç ilişkisi: UE x I= RE x IE + Rf x If + E x IE
=>PE= PKE + PKf + Pm
Verim: η=
𝑃𝑚
𝑃𝐸
=𝑃
𝑃𝑚
Devir sayısı: n=
𝐾𝐸 +𝑃𝐾𝑓 +𝑃𝑚
𝑈−IExRE
𝐾𝑥Ø
Şönt motora yol verme:
Motorun kısa zamanda hız alarak normal devrine ulaşması için momentin yüksek olması istenir.
M=Km x Ø x IE
2𝑃 𝑥 2𝑥108 𝑥 0.975
=> Km=
2𝑎𝑥60
moment Ø ve IE ye bağlıdır.
Ø nin yükselmesi için uyartım sargısı direnci devre dışı bırakılırsa. Kutuplardan geçen akım maksimum olur, böylece
manyetik alan artar. Motorun endüvi direnci çok küçük olduğundan yol alırken motor çok akım çeker. Motor yol
aldıkça zıt EMK meydana gelir ve akım azalır. IE=
𝑈−𝐸
𝑅𝐸
ilk anda akımın yüksek çekilmemsinin sebebi; motor
𝑈−0
dönmediği için zıt EMK oluşmaz yani E=0 Bu durumu formülde yerine koyarsak. IE= 𝑅
𝐸
olacaktır.RE direnci zaten
küçüktü E=0 olunca akım değeri doğal olarak çok yüksek çıkıyor.Bu akım aynı zamanda yol alama anında çekilen
𝑈
akımdır. Iy=𝑅 dir. Şimdi bu akımı sınırlamak için ne yapabileceğimizi düşünürsek.Elimizde değiştirilebilecek iki
𝐸
değer var U ve RE bunlar değiştirilerek akımın sınırlana bileceği, kontrol edilebileceği rahatlıkla görülmektedir.Giriş
geriliminin kontrol edilerek yani U ayarlanarak yapılan sınırlama pek kullanılmaz bunun yerine RE direncine seri
dirençler bağlanarak akım sınırlama yoluna gidilir. Öyleyse yeni akım formülümüz şöyle olacaktır. Iy=𝑅
𝑈
𝐸 +𝑅𝑦
Görüldüğü gibi akım azaltılmış olur. Kademe kademe dirençler devreden çıkarılarak motor normal devrine ulaşana
dek devama edilir. Motor normal çalışma devrine ulaştığında dirençler devreden çıkmış olur.
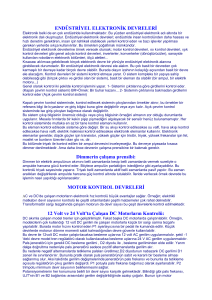
Şönt Motor Dış Karakteristiği:
Motorun uçlarındaki gerilim ve uyartım devresinden geçen akım sabit olduğuna göre yük akımı ile devir sayısı
arasındaki bağıntıya denir.
Devir sayısının düşme nedenleri;
Motor yükü artıkça, momentinde artması gerekmektedir ki yükü karşılaya bilsin. M=Km x Ø x IE =>Momentin
artması için IE nin artması gerekir. IE=
𝑈−𝐸
𝑅𝐸
=>U sabit olduğundan E nin azalması gerekir.E nin azalması için
E = k.Ø.n =>sabit Ø alanı için n’in devir sayısının azalması gerek. n=
𝑈−IExRE
𝐾𝑥Ø
1
Eğriyi yorumlayacak olursak; Yükü arttıkça devir sayısının buna bağlı
olarak az bir düşüş gösterdiği görülmektedir. I’nın artması E’nin
azalmasına bu durumda da n in azalmasına sebep olduğu grafikte
açıkça görülmektedir.
Şekil.1 Şönt motor dış karakteristik eğrisi.
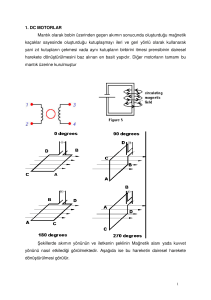
Şönt motor devir yönünün değiştirilmesi:
Endüviden geçen akım veya ana manyetik alanın yönüne bağlıdır. İkisinden birinin değiştirilmesiyle motorun yönü değiştirilir.
Aynı anda ikisi de değiştirilirse motor yönü değişmez.
Özellikleri ve kullanım alanları:
1-)Yol alma anında momentleri yüksek değildir.Aşırı yükte kolay yol almazlar.
2-)Devir sayıları yükle çok az değişir.Devir sayısı hemen hemen sabittir.
3-Boşta devir sayıları tehlikeli değerlere çıkmaz ancak uyartım devresindeki bir kopukluk devir sayısını tehlikeli boyutlara
çıkarır.
Yüksek kalkınma momentinin istenmediği ve sabit devir sayısının istendiği yerlerde kullanılır.
Vantilatör, aspiratör ve tulumbalarda kullanılır.
2