KUATERNİYON ÇEŞİTLERİ VE de MOİVRE FORMÜLLERİ
Soner OFLAZ
YÜKSEK LİSANS TEZİ
MATEMATİK ANA BİLİM DALI
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
EYLÜL 2015
Soner OFLAZ tarafından hazırlanan “KUATERNİYON ÇEŞİTLERİ VE de MOİVRE
FORMÜLLERİ” adlı tez çalışması aşağıdaki jüri tarafından OY ÇOKLUĞU ile Gazi Üniversitesi
Matematik Anabilim Dalında YÜKSEK LİSANS TEZİ olarak kabul edilmiştir.
..…………………
Danışman: Prof. Dr. Baki KARLIĞA
Matematik Anabilim Dalı, Gazi Üniversitesi
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum
..…………………
İkinci Danışman: Doç.Dr.Hesna KABADAYI
Matematik Anabilim Dalı, Ankara Üniversitesi
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum.
...…………………
Başkan : Prof.Dr.Mustafa ÇALIŞKAN
Matematik Anabilim Dalı, Gazi Üniversitesi
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum.
...…………………
Üye : Prof.Dr.Aysel VANLI
Matematik Anabilim Dalı, Gazi Üniversitesi
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum.
...…………………
Üye : Prof.Dr.Yusuf YAYLI
Matematik Anabilim Dalı, Ankara Üniversitesi
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum.
Tez Savunma Tarihi: 29/09/2015
Jüri tarafından kabul edilen bu tezin Yüksek Lisans Tezi olması için gerekli şartları yerine
getirdiğini onaylıyorum.
…………………….…….
Prof. Dr. Şeref SAĞIROĞLU
Fen Bilimleri Enstitüsü Müdürü
ETİK BEYAN
Gazi Üniversitesi Fen Bilimleri Enstitüsü Tez Yazım Kurallarına uygun olarak
hazırladığım bu tez çalışmasında;
Tez içinde sunduğum verileri, bilgileri ve dokümanları akademik ve etik kurallar
çerçevesinde elde ettiğimi,
Tüm bilgi, belge, değerlendirme ve sonuçları bilimsel etik ve ahlak kurallarına uygun
olarak sunduğumu,
Tez çalışmasında yararlandığım eserlerin tümüne uygun atıfta bulunarak kaynak
gösterdiğimi,
Kullanılan verilerde herhangi bir değişiklik yapmadığımı,
Bu tezde sunduğum çalışmanın özgün olduğunu,
bildirir, aksi bir durumda aleyhime doğabilecek tüm hak kayıplarını kabullendiğimi beyan
ederim.
Soner OFLAZ
29/09/2015
iv
KUATERNİYON ÇEŞİTLERİ VE de MOİVRE FORMÜLLERİ
(Yüksek Lisans Tezi)
Soner OFLAZ
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
Eylül 2015
ÖZET
Bu tez beş bölümden oluşmuştur. Birinci bölüm, giriş kısmına ayrılmıştır. İkinci ve üçüncü
bölümler reel kuaterniyonlar için temel kavramlar ve de Moivre formülleri ifade edilmiştir.
Dördüncü bölümde split kuaterniyonların temel kavramları ve bunların kausal
karakterlerine bağlı de Moivre formülleri verildi. Beşinci bölüm ise sonuç ve önerilere
ayrılmıştır.
Bilim Kodu
: 204.1.050
AnahtarKelimeler : de Moivre, Kuaterniyon, Dual kuaterniyon, Genelleştirilmiş
SayfaAdedi
Danışman
İkinci Danışman
Kuaterniyon, Euler, Vida Operatörü
: 55
: Prof. Dr. Baki KARLIĞA
: Doç. Dr. Hesna KABADAYI
v
de MOIVRE’S FORMULA WITH THEVARIOUS TYPES OF QUATERNIONS
(M.Sc.Thesis)
Soner OFLAZ
GAZİ UNIVERSITY
GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES
September 2015
ABSTRACT
This thesis consist of five chapters. The first chapter is devoted to introduction. The
second and third sections was expressed de Moivre’s formulas and basic conceps for real
quaternios. In the fourth chapter, some preliminearies about on split quaternions and de
Moivre’s Formulas with respect to causal characters of split quaternion are given as in The
fifth chapter is devoted to conclusions and suggestions.
Science Code
Key Worrds
: 204.1.050
: de Moivre, Quaternions Dual quaternions, Generalized Quaternions,
Page Number
Supervisor
Co-Supervisor
Euler, Screw Operator
: 55
: Prof. Dr. Baki KARLIĞA
: Assoc. Prof. Dr. Hesna KABADAYI
vi
TEŞEKKÜR
Bu tez konusunu bana veren ve çalışmalarımın her safhasında yakın ilgi ve önerileriyle
beni çalıştıran ve yönlendiren hocam Gazi Üniversitesi Fen Fakültesi, Matematik Anabilim
Dalı Öğretim Üyesi Prof. Dr. Baki KARLIĞA’ya ve çalışmalarımda yardımcı olan Doç.
Dr. Hesna KABADAYI’ya teşekkürlerimi sunarım.
vii
İÇİNDEKİLER
Sayfa
ÖZET ..............................................................................................................................
iv
ABSTRACT ....................................................................................................................
v
TEŞEKKÜR ....................................................................................................................
vi
İÇİNDEKİLER ...............................................................................................................
vii
ÇİZELGELERİN LİSTESİ.............................................................................................
ix
ŞEKİLLERİN LİSTESİ ..................................................................................................
x
SİMGELER VE KISALTLMALAR ..............................................................................
xi
1. GİRİŞ........................................................................................................................
1
2. TEMEL KAVRAMLAR .....................................................................................
3
2.1. Reel Kuaterniyonlar ...........................................................................................
3
2.2. Reel Kuaterniyon Çarpımı ..................................................................................
4
2.3. Pure Kuaterniyonların Kuaterniyon Çarpımı ......................................................
6
2.4. Reel Kuaterniyonların Kutupsal Gösterimi .........................................................
6
2.5. Uzayda Bir Doğru Etrafında Dönme ...................................................................
7
3. REEL KUATERNİYONLAR İÇİN EULER VE de MOİVRE FORMÜLÜ
3.1. Kuaterniyonlar İçin Euler ve de Moivre Formülü ...............................................
11
4. SPLİT KUATERNİYONLAR ...........................................................................
19
4.1. Split Kuaterniyonlar ............................................................................................
19
4.2. Lorentziyen Vektörel Çarpımın Özellikleri ........................................................
19
4.3. Split Kuaterniyon Cebiri .....................................................................................
21
4.4. Split Kuaterniyoların Özellikleri .........................................................................
23
4.5. Split Kuaterniyonların
Birim Vektörünün de Moivre Formülleri .................
31
4.6. Time-Like Kuaterniyondan Space-Like Kuaterniyon Elde Edilmesi .................
34
4.7. Split Kuaterniyonlar da de Moivre Formülü .......................................................
38
11
viii
Sayfa
4.8. Split Kuaterniyonların Kökleri ............................................................................
40
4.9. Split Kuaterniyon İçin Lorentz Uzayında Dönme...............................................
44
5. SONUÇ VE ÖNERİLER ....................................................................................
51
KAYNAKLAR ...............................................................................................................
53
ÖZGEÇMİŞ ....................................................................................................................
55
ix
ÇİZELGELERİN LİSTESİ
Çizelge
Sayfa
Çizelge 4.1. Split kuaterniyonların vektör kısımlarının kuaterniyon çarpımı. ...............
37
x
ŞEKİLLERİN LİSTESİ
Şekil
Sayfa
Şekil 1.1. Uzayda bir doğru etrafında dönme. ................................................................
7
Şekil 3.1. Kuaterniyonun 6. kuvveti
kadar dönmesidir...........................................
17
Şekil 3.2. Kuaterniyonun 3. kuvveti
kadar dönmesidir...........................................
17
Şekil 3.3. Bir kuaterniyon çarpımının geometrik anlamı. ...............................................
18
Şekil 4.1. Bir birim vektör kısmı time-like olan q time-like split kuaterniyonun
lighlike olmayan q ekseni etrafında 2 açısı kadar dönme belirtir. ...............
50
xi
SİMGELER VE KISALTLMALAR
Bu çalışmada kullanılmış simgeler ve kısaltmalar, açıklamaları ile birlikte aşağıda
sunulmuştur.
Simgeler
Açıklamalar
Vektörel Çarpım
⟨⟩
Öklid Anlamında İç Çarpım
⟨⟩
Lorentz Anlamında İç Çarpım
Lorentz Anlamında Vektörel Çarpım
3 Boyutlu Minkowski Uzay
Pseudo Hiperbolik Düzlem
Genelleştirilmiş Reel Kuaterniyon Kümesi
Kuaterniyon Eşleniği
Üç Boyutlu Lorentz Uzayı
de-Sitter Düzlemi
Birim Pure Reel Kuaterniyon Kümesi
Birim Reel Kuaterniyon Kümesi
⃗
Reel Kuaterniyonun Birim Vektörü
Split Kuaterniyon Çarpımı
Reel Kuaterniyonlar Çarpımı
H
Split Kuaterniyonlar Kümesi
Reel Sayı Kümesi
Dönüşüm Matrisi
2x2 tipinden Determinantı Bir Olan Üniter Matris
𝓚
Reel Kuaterniyonlar Kümesi
1
1. GİRİŞ
Kuaterniyonların Tarihçesi
Hamilton 1833 yılında iki reel sayıdan oluşan kompleks sayılar kümesinin bir cebir
oluşturduğunu görmüştür. Bu sonuçtan yola çıkarak çalışmalarını üç reel bileşenden oluşan
üçlü sayı sistemi üzerinde yoğunlaştırmıştır. Vektör olarak adlandırdığı
bu sistem üzerinde toplama ve çarpma işlemlerini tanımlayabildiği halde bölme işlemi için
bir metot geliştirememiştir. 1843’de tanımladığı bu sayı sisteminin çarpma işlemine göre
değişme özelliğini sağlamadığını anladı ve çarpma işleminin bu özelliğinden vazgeçerek
şeklindeki çarpma özelliğini sağlayan üç sanal birim
tanımladı. Böylece Hamilton, Kuaterniyon ismini verdiği 4-boyutlu olan hiper-kompleks
sayıyı keşfetmiş oldu. Split kuaterniyonlar ise 1849’da James Cockie tarafından ortaya
atılmıştır. Hamilton ve James Cockie, çarpım operatörleri ile donatılmış 4 boyutlu reel
vektör uzayı oluşturmuşlardır. Kuaterniyondan farklı olarak, split kuaterniyonlar sıfır
bölenli olabilmektedirler [1, 2].
Kuaterniyonlar aynı reel ve kompleks sayılar gibi bir sayı sistemidir. Reel sayılar bir,
kompleks sayılar iki bileşen içerirken kuaterniyonlar dört bileşene sahiptir. Kompleks
sayılar reel sayıların bir kombinasyonudur. Dolayısıyla da reel sayılar, kompleks sayıların
bir alt kümesidir [1].
1878 yıllarında Vidinli Hüseyin Tevfik Paşa İngilizce olarak yazdığı Lineer Cebir adlı
kitapta kompleks sayılarla ilgili teorisinde ileri sürdüğü çarpımın 3-boyutlu uzaya
uygulamanın bir yolunu bulmuş ve özgün çalışma olarak kuaterniyonların çarpımının bizi
üç boyutlu uzayda çalışmaya zorladığını vurgulamıştır. R. Kaya ve Ş. Koçak tarafından
kuaterniyonlardan hareketle zayıf kuaterniyonların tanımı yapılarak
’ün vektörleri
zayıf kuaterniyon uzayına taşınmış ve bölme işleminin bu şekilde daha anlamlı olarak
gerçekleştirilebileceği ispat edilmiştir [2, 3].
E. Schrödinger, W. Heisenberg, P. A. M: Dirac, M. Born ve daha pek çok ünlü fizikçi
tarafından 1927 ile 1932 yılları arasında, geliştirilen kuantum mekaniğinin bulunuşundan
sonra Kuaterniyonların fizikte kullanımı gerçekleşmiştir. 20. yüzyılın başlarında Yale
Üniversitesi profesörlerinden Gibbs, Hamilton kullanım şeklini ve Rodrigues’e ait
2
çalışmaları baz alarak vektör nokta çarpımı ve bugün bildiğimiz vektörel çarpımla
Kuaterniyonları tanımlandı. Hemen hemen aynı zamanlarda Albert Einstein 4. Boyutlu
uzayın kullanım şeklini keşfetti. Işık hızını tüm gözlemlerde sabitlemek için uzay ve
zamanı birimlendirdi [3].
Türk fizikçilerinden Prof. Dr. Feza Gürsey de kuaterniyonik yapıların önemini 1950’li
yıllarda sezip, bu yapıları ve bu yapılara ait grup ve geometrileri çalışarak fiziğe katkıda
bulunmuştur. Kuaterniyonların temel fizik kanunlarının incelenmesinde oynadığı rolün
önemi, özel rölativite ve kuantum mekaniğinin keşfi ile daha iyi anlaşıldı [4]. Feza Gürsey
de 1955 yılında özel rölativiteyi kuaterniyonlar ile ifade eden kitabı çıkardı [1].
Hacısalihoğlu[ ]de reel kuaterniyonlar ile daul kuaterniyonları ve bunların sağladıkları
özellikleri ayrıntılı olarak incelemiş ve birim dual kuaterniyonlar yardımıyla dönme ve
kayma operatörlerini ifade etmiştir. Ayrıca vida operatörünün dönme ve kayma
operatörünün bileşkesi şeklinde yazılabileceğini göstermiştir.
E.Cho, [4]. de karmaşık sayılarda iyi bilinen de-Moivre formülünün kuaterniyonlar için
karşılığını vermiştir.
Bu çalışmada reel kuaterniyonlar ve split kuaterniyonların özellikleri ile bu kuaterniyon
çeşitleri için de Moivre formülleri açık bir şekilde incelenecektir. Ayrıca bir split
kuaterniyon ile bir kausal kuaterniyonun çarpımı açıkça ifade edilecektir.
3
2. TEMEL KAVRAMLAR
2.1. Reel Kuaterniyonlar
2.1.1. Tanım
,
sırası ile
ve
Özelliğinde ki çarpma ve vektörel çarpım olmak üzere;
reel sayılarına da
ifadesine bir reel kuaterniyon ve
için
kuaterniyonunun bileşenleri
denir [2].
⃗
olmak üzere;
⃗
vektörel kısmı denir ve Ϥ
’ya kuaterniyonun skalar kısmı, ⃗
ya da
şeklinde yazılır.
Buradaki i, j, k sanal birimleri 3-boyutlu reel vektör uzayındaki herhangi bir dik koordinat
sisteminin baz vektörleri olarak alınabilir
Özel olarak Ϥ = ⃗ ise kuaterniyona pure kuaterniyon denir.
⃗ }
𝓚={ |
reel kuaterniyonlar kümesi üzerindeki ikili işlemler
⊕ : 𝓚x𝓚
(
𝓚
⃗
⊕
⊕
ve
⊙: x𝓚
(𝜆,Ϥ)
𝜆⊙Ϥ 𝜆Ϥ
olmak üzere; {
⊕
𝜆
𝜆⃗
⊙} altılısı bir vektör uzayıdır.
4
2.1.1. Teorem
𝓚 vektör uzayı
’e izomorftur.
İspat [6]. den görülebilir.
2.2. Reel Kuaterniyon Çarpımı
2.2.1. Tanım
(2.1)
işlemine 𝓚 üz r n
şeklinde tanımlı
|
u t rn yon ç rpım şl m
n r[ ]
|
(1.2)
olduğundan
ve
olur. O halde
değişmeli değildir.
) (
olduğu görülebileceğinden
işlemi birleşmelidir. Böylece aşağıdaki tanımı verebiliriz.
2.2.2. Tanım
{
⊙ } yedilisine kuaterniyon cebiri denir.
⊕
Kuaterniyon çarpımı (2.1) ve (2.2)’yi kullanarak
Ϥ
Ϥ
⟨
Ϥ
Ϥ
⟩
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
olur.
Böylece
Ϥ
Ϥ
Ϥ
Ϥ
⟨
Ϥ
Ϥ
⟩,
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
olur.
(2.2)
5
2.2.3. Tanım
𝓚 için ̅
Ϥ
⃗Ϥ x(
Ϥ
Ϥ
⃗ Ϥ kuaterniyonunun eşleniği denir ve
⃗ Ϥ şeklinde gösterilir.
Ϥ
(2.3) ve ⃗ Ϥ ⃗ Ϥ
(
⃗ Ϥ kuaterniyonuna q
Ϥ
olduğundan
⃗Ϥ
Ϥ
Ϥ Ϥ
⟨⃗ Ϥ ⃗ Ϥ ⟩
dir.
Eşleniğin Özellilkleri:
1)
2)
3)
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
Ϥ
q
2.2.4. Tanım
N:𝓚
x
şeklinde tanımlı N fonksiyonuna reel kuaterniyonlar üzerindeki norm fonksiyonu denir.
reel sayısına da qreel kuaterniyonunun normu denir.
(2.1) den
kuaterniyonun normu
şeklinde hesaplanır [6].
Normun özellikleri:
1)
x
2)
ve
[6].
2.2.5. Tanım
𝓚-{ }
için
kuaterniyonuna, kuaterniyonunun tersi denir.
olduğu [2] den görülebilir.
1
olacak
şeklinde gösterilir.
şekilde
ki
6
2.2.6. Tanım
𝓚 için
kuaterniyonlarına P nin Ϥ kuaterniyonu ile sırasıyla
ve
sağdan ve soldan bölünmüş kuaterniyonu denir [6].
2.2.7. Tanım
𝓚-{ } için
kuaterniyonuna birim reel kuaterniyon denir [6].
√
Kuaterniyon çarpımının özellikleri:
1)
2)
+
3)̅̅̅̅̅
̅̅
2.3. Pure Kuaterniyonların Kuaterniyon Çarpımı
⃗
, ⃗
iki vektörün kuaterniyon çarpımı
⟨ ⟩ iç çarpımı ve
⃗
⃗
üzerinde
de vektörel çarpımı göstermek üzere (1.1) den
⟨⃗ ⃗ ⟩
⃗
⃗ olur.
2.4. Reel Kuaterniyonların Kutupsal Gösterimi
Reel eksen ile q arasındaki açı ,
√
√
√
ve
o
q
, n
√
√
o
√
√
olmak üzere;
n
ifadesine q kuaterniyonunun kutupsal gösterimi denir.
7
2.5. Uzayda Bir Doğru Etrafında Dönme
Yönlendirilmiş bir d doğrusu ile 2
açısı verildiğinde uzayın bir P noktasına öyle bir
noktası tekabül ettirelim ki P den d doğrusuna çizilen dik düzlemin d yi kestiği nokta
ve ⃗⃗⃗⃗⃗ vektörünün
doğrusu etrafında pozitif yönde 2 açısı kadar döndürüldüğünde
elde edilen vektör de ⃗⃗⃗⃗⃗⃗⃗ olsun. Bu şekilde elde edilen
noktasına
nin d doğrusu
etrafında 2 açısı kadar döndürülmüşü denir.
Yönlendirilmiş d doğrusunun birim doğrultman vektörü ⃗ ve d doğrusunun belli geçtiği
sabit nokta da A olsun.
Şekil 1.1. Uzayda bir doğru etrafında dönme.
Şekil 1.1. den
⃗⃗⃗⃗⃗⃗⃗
⃗⃗⃗⃗⃗
⃗⃗⃗⃗⃗⃗⃗
(2.4)
yazılabilir. Diğer taraftan ⃗⃗⃗⃗⃗ vektörü nin ⃗ üzerine dik izdüşüm vektörü olduğundan
⃗⃗⃗⃗⃗
⟨
⟨
⟩
⃗
⟩
(2.5)
=⟨ ⃗ ⟩ ⃗
ve
⃗⃗⃗⃗⃗
⟨ ⃗ ⟩⃗
(2.6)
8
bulunur. ⃗ x⃗⃗⃗⃗⃗ vektörü hem ⃗ ’ya hem de ⃗⃗⃗⃗⃗ ‘ye dik olduğundan ⃗⃗⃗⃗⃗ ve ⃗ x ⃗⃗⃗⃗⃗ vektörleri
dönme eksenine dik düzlemi gererler.
etrafında dönme nedeniyle ‖⃗⃗⃗⃗⃗ ‖
‖⃗⃗⃗⃗⃗⃗⃗ ‖ dir.
Buna göre;
𝜆 ⃗⃗⃗⃗⃗
⃗⃗⃗⃗⃗⃗⃗
𝜆
o
,𝜆
⟨⃗⃗⃗⃗⃗⃗⃗ ⃗
⃗⃗⃗⃗⃗ ⟩
‖⃗⃗⃗⃗⃗⃗⃗ ‖‖ ⃗
gerekli hesaplamalar yapılarak
n
olduğu görülür. Böylece
𝜆 ⟨ ⃗ ⃗⃗⃗⃗⃗ ⃗ ⃗⃗⃗⃗⃗ ⟩
⃗⃗⃗⃗⃗ ‖ o (
‖⃗⃗⃗⃗⃗⃗⃗ ‖
𝜆 ‖ ⃗ ⃗⃗⃗⃗⃗ ‖
)
𝜆 ‖⃗⃗⃗⃗⃗ ‖
n
n
⃗⃗⃗⃗⃗
𝜆
𝜆
⃗⃗⃗⃗⃗⃗⃗
o
⃗⃗⃗⃗⃗
⃗ ⃗⃗⃗⃗⃗
n
(2.7)
bulunur. (2.6) eşitliğini (2.7) de yerine yazılarak;
⃗⃗⃗⃗⃗⃗⃗
o
⟨ ⃗ ⟩⃗
⃗⃗⃗⃗⃗⃗⃗
o
o
n
⟨ ⃗ ⟩⃗
⟨ ⃗ ⟩⃗
⃗
n
⃗
(2.8)
olur. (2.8) eşitliğini (2.4) de yerine yazarak
⃗⃗⃗⃗⃗⃗⃗
⟨ ⃗⟩
o
⃗
o
n
⃗
A başlangıçlı pozitif yönlü dik koordinat sistemi {
bulunur.
} olmak üzere
⃗
alırsak.
A noktasından geçen ve doğrultmanı ⃗ =(
( – o
(
n
olan doğru etrafında dönme
o
9
eşitliğinden
o
n
n
n
n
n
n
n
n
o
n
n
n
n
n
n
o
n
veya
o
n
alınarak
bulunur. Bunu matris formunda yazarsak
[
]
[
][ ]
olur.
Buradaki
[
]
matrisine koordinat sisteminin orijinden geçen d doğrusu etrafında dönme matrisi denir.
Eğer d doğrusu koordinat sisteminde orijinden geçmiyor ise koordinat sistemi d
doğrusunun geçtiği A noktasına ötelenir. O zaman dönme matrisi
[ ]
olur. Buradaki
noktası d doğrusunun geçtiği A noktasının {
koordinat sistemine göre koordinatlarıdır [7].
}
10
11
3. REEL KUATERNİYONLAR İÇİN EULER VE DE MOİVRE
FORMÜLÜ
3.1. Kuaterniyonlar İçin Euler ve de Moivre Formülü
{
| |
{
| |
}
}
̅
olsun.
3.1.1. Sonuç
kuaterniyon çarpımı altında bir gruptur.
İspat
i)
bir cebir olduğundan iki kuaterniyonun çarpımı da bir kuaterniyondur.
ii)
.
iii) Çarpmaya göre etkisiz elemanı e
olmak üzere;
.
iv) Ϥ
için
olmak üzere; q kuaterniyonunun çarpma işlemine
göre tersi
kuaterniyonudur.
3.1.1. Tanım: (Üniter Matris)
{
|
}
kümesine üniter matris grubu denir.
3.1.2. Sonuç
,SU(2) ye izomorftur.
12
İspat
(
)
şeklinde tanımlı dönüşüm ve
p,q
ve p
olsun.
A=
B=
C=
D=
olmak üzere;
(pxq) =
=(
)
=(
) (
)
ve
(pxq)
p
olduğundan
(P)= (Ϥ)
q)
homomorfizmdir.
(
)
(
)
matrislerin eşitliği tanımından p=q olduğu görülür. O halde
=(
det
)
=1
(Ϥ) =
SU(2) için
=1
olacak şekilde
var olduğundan
örtendir.
, 1-1 dir.
13
O halde
izomorfizmdir.
için
q=
o
,
n
√
ve
w
√
olmak üzere;
q= o
n
şeklinde ifade edilebilir [4].
3.1.1. Teorem
olmak üzere,
w
o
n
İspat w
o
o
için
o
n
dir.
olduğundan
n
o
n
o
o
n
o
o
n
n
o
n
o
o
n
o
n
n
o
o
n
n
elde edilir.
3.1.2.Teorem
{ o
Teorem 3.1.1 den
ve
} cümlesi ,
n
ün bir alt grubudur
’ izomorftur [8]
İspat q= o
n
ve p= o
n
alınırsa Teorem 3.1.1 den
14
ϤxP
olur.
= o
n
= o
n
olduğundan
alt
olduğundan
‘e izomorftur.
‘in
grupdur.
o
elemanları
3.1.3. Teorem: (de Moivre formülü)
Ϥ
olmak üzere n
,w
o
n
için,
o
n
İspat İspatı tümevarım yöntemiyle yapacağız.
i) n negatif olmayan bir tamsayı olsun.
Teorem 3.1.1’i den
(
o
)
o
n
o
n
o
n
n
olur. O halde teorem n=2 için doğrudur,
n=k için doğru olsun. Yani;
o
n
olsun,
teorem n=k için doğru olduğundan
o
o
o
n
. o
n
n
n
=
n
o
[ ]
n
şeklinde
15
ii) n negatif tamsayı ise,
pozitif olduğundan
=
= o
o
= o
= o
n
n
n
n
=
olur.
3.1.3. Sonuç
Her n 3 tamsayısı için sayılamayacak çoklukta
denklemini sağlayan birim
kuaterniyon vardır [4].
İspat
birim kuaterniyon ise
o
n
şeklinde yazılabilir.
de-Moivre formülünden
o
n
o
n
Bu iki denklemden;
veya
o
n
,
şeklinde elde edilir.
o
,aynı şekilde n=2 için n
o
dır.
Dolayısıyla n=1 ve n=2 için , w dan bağımsızdır.
n
olduğundan
16
3.1.1. Örnek
o
√
nin derecesi 6 dır. Gerçekten
√
√
o
√
n=6 için
o
n
√
o
√
n
elde edilir.
o
√
nin derecesi 3 dür. Gerçekten
√
√
o
√
n=3için
o
√
n
17
o
elde edilir.
√
n
dir.
Bu kuaterniyonlar (1,1,1) vektörü tarafından belirlenen eksen etrafında
ün
ve
açıları kadar dönmesine karşılık gelir. Eksen x=y=z denklemi ile verilir.
Şekil 3.1. Kuaterniyonun 6. kuvveti
kadar dönmesidir.
Şekil 3.2. Kuaterniyonun 3. kuvveti
kadar dönmesidir.
Burada bir = o
n
kuaterniyonu için
dönüşümü
de w vektörü
tarafından belirlenen eksen etrafında, v vektörünün 2 kadar dönmesidir [14].
18
Şekil 3.3. Bir kuaterniyon çarpımının geometrik anlamı.
19
4. SPLİT KUATERNİYONLAR
4.1. Split Kuaterniyonlar
4.1.1. Tanım (Lorentz iç çarpım)
⟨⟩ :
⟨
⟩
simetrik bilineer dönüşümüne
⟨⟩
üzerinde Lorenziyen iç çarpım denir.
Lorenz-Minkowski uzayı denir.
ikilisine de
4.1.2. Tanım (Lorentziyenvektörel çarpım)
⃗
için
⃗
=|
|
şeklinde tanımlı
işlemine
uzayında Lorentziyen vektörel çarpım denir.
4.1.3. Tanım
için
i) ⟨
⟩
ise u ya space-like
ii) ⟨
⟩
ise u ya time-like
iii) ⟨
⟩
ve u
ise u ya light-like (null)
vektör denir [9].
4.2. Lorentziyen Vektörel Çarpımın Özellikleri
a.
b.
)= ⟨
(
⟨⟨
⟩
⟨
|
⟨
⟩ ⟨ ⃗⃗ ⟩ ⟩
c.
=j(
d.
=j
)
j(
⟨
⟩
⟩
⟩
⟨ ⃗⃗ ⟩
|
⟨ ⃗⃗ ⟩
20
e.
=⟨
f.
⟩ =⟨
⟩ [9].
4.2.1. Tanım
{
|⟨
⟩
}
kümesine pseudo hiperbolik düzlem
{
|⟨
⟩
}
kümesine de de-Sitter düzlemi denir.
4.2.2. Tanım
⃗
aynı time-like konisinde ise
⟨
⟩
‖ ⃗ ‖‖ ‖ o
⃗
olacak şekilde
⃗
vardır [9].Bu
⃗
Bundan sonra
⃗
olarak alacağız.
açısına hiperbolik açı denir.
4.2.1. Teorem
⃗
ve aynı time-like konideki ⃗
(i) ⃗
⟨
time-like vektörler ise
⟩
(ii) ⃗
c) Sp{ ⃗
‖⃗
‖
‖ ⃗ ‖‖ ‖ n
} space-like ise
⟩
‖ ⃗ ‖‖ ‖ o
‖⃗
‖
‖ ⃗ ‖‖ ‖ n
} time-like ise
b) Sp{ ⃗
⟨
‖ ⃗ ‖‖ ‖ o
space-like vektörler ise
a) Sp{ ⃗
⟨
için;
⟩
‖ ⃗ ‖‖ ‖ o
} null ise ‖ ⃗
‖⃗
‖
‖
[9].
‖ ⃗ ‖‖ ‖ n
21
İspat
(i) Lorenztiyen vektörel çarpımının (b) özelliğinden
‖⃗
‖ = ⟨⃗
⟨⃗ ⟩
|
⟨⃗ ⃗ ⟩
⟩
⃗
⟨⃗
⟨⃗
⟩
‖⃗
‖ ⃗ ‖‖ ‖ o
‖
⟨⃗ ⃗ ⟩
|
⟨⃗ ⟩
⟩
‖⃗ ‖ ‖ ‖
olduğundan da
‖ ⃗ ‖‖ ‖ n
olur.
(ii) nin ispatı da benzer şekilde gösterilir.
4.3. Split Kuaterniyon Cebiri
sembolü
özelliğindeki split kuaterniyon çarpımı ve
de
özelliğindeki çarpım ise lorentziyen vektörel çarpım olmak üzere
ifadesine
bir
reel
split
kuaterniyon
a,b,c,d
denir.
Bütün
için;
split
kuaterniyonların kümesi,
H={ |
}
ile belirtilir.
4.3.1. Tanım (Splitkuaterniyon çarpımı)
için
vektörüne de
reel sayısına
nun vektörel kısmı denir ve
nun skaler kısmı,
şeklinde gösterilir.
için
⟨⃗
⃗ ⟩
⃗
⃗
(4.1)
22
şeklinde tanımlı işleme split kuaterniyon çarpımı denir [9].
4.3.2. Tanım
q split kuaterniyonun skalar kısmı
ise q ya pure split kuaterniyon denir.
4.3.3. Tanım
pure split kuaterniyon ise (4.1) den
⟨⃗
⃗ ⟩
⃗
⃗ [ ].
4.3.4. Tanım
Split kuaterniyon çarpımı matris çarpımı yardımı ile
|
| | |
şeklinde verilir [9].
4.3.5. Tanım
ise
: H
kuaterniyonuna
nun eşleniği denir.
H
dönüşümüne de H üzerinde eşlenik işlemi denir.
4.3.6. Tanım (split kuaterniyon normu)
için
23
√| |değerine
olmak üzere
H
:
nun normu denir.
H
dönüşümüne de H üzerinde norm dönüşümü denir.
ise q kuaterniyonuna birim split kuaterniyon denir.
kuaterniyonuna a
ise
nunnormlanmışı denir [9].
4.3.7. Tanım
için,
i)
ii)
iii)
ise q ya time-like,
ise q ya space-like,
ise q ya light-like(null)
split kuaterniyon denir [9].
4.3.8. Tanım
ise
kuaterniyonuna q nun split kuaterniyon çarpımına göre tersi denir.
4.4. Split Kuaterniyoların Özellikleri
için
i)
ii)
iii)
iv)
v)
vi)
{ ⃗ ⃗ } lineer bağımlıdır.
24
4.4.1. Önerme
Herhangi split space-like kuaterniyonun vektör kısmı space-likedır.
İspat q split space-like kuaterniyon olsun.
⟨⃗ ⃗ ⟩
olduğundan
ve
olur.
Diğer taraftan herhangi time-like split kuaterniyonunun vektör kısmı space-like, time-like
ve null olabilir.
Bu üç durum teorem olarak aşağıda
de inceleyeceğiz.
4.4.1. Teorem
n
√
, o
ve
√
olmak üzere her space-like q split kuaterniyon
n
o
şeklinde yazılabilir [9].
İspat
⃗ olmak üzere space-like split kuaterniyon olduğundan
dır.
⟨⃗ ⃗ ⟩
⃗ space-like olduğundan ⟨ ⃗ ⃗ ⟩
‖ ‖
‖ ‖ olur. Önceki eşitlikte yerine yazılırsa
25
n
ve
‖
‖
o
olacak şekilde
vardır.
O halde;
n
‖ ‖
o
⃗
‖
⃗
‖
birim time-like vektör olduğundan
‖ ‖ ve ⃗
n
ve buradan
n
o
olduğu görülür.
4.4.2. Teorem
Her time-like kuaterniyon vektör kısmı space-like olan
o
n
formunda yazılabilir. Burada;
o
İspat
,
√
n
ve
[ ].
√
⃗ ise o halde;
⟨
⃗
⃗
⟩
ve
⟨⃗ ⃗ ⟩
⃗ space-like olduğundan ⟨ ⃗ ⃗ ⟩
‖ ‖
(4.2)
‖ ‖ dır. Bunu (4.2) de yerine yazarak
26
o halde;
o
‖ ‖
ve
olacak şekilde
‖ ‖
⃗
‖
‖
n
vardır.
o
(4.3)
n
(4.4)
olduğundan ⃗
‖ ‖ (4.4) den ⃗
n
(4.5)
elde edilir.
⃗ de yerine yazılırsa
(4.2) ve (4.5),
o
n
olduğu bulunur.
4.4.3. Teorem
Her time-like kuaterniyon için vektör kısmı time-like olan
o
n
formunda yazılabilir, time-like split kuaterniyon olduğundan
o
√
n
ve
√
de birim time-like vektördür [9].
İspat:
⃗ olmak üzere
⟨
⃗
⟨⃗ ⃗ ⟩
⃗
birim time-like kuaterniyondur. O halde;
⟩
(4.6)
27
⃗ time-like olduğundan ⟨ ⃗ ⃗ ⟩
⟨⃗ ⃗ ⟩
‖ ‖ dır, bu (4.6) da yerine
yazılırsa
‖
=
‖
‖
o
ve
‖
‖
‖
n
olacak şekilde
vardır.
O halde;
‖ ‖
⃗
‖
‖
o
(4.7)
n
(4.8)
birim time-like vektörü ⃗
⃗
‖ ‖ (4.8) den
n
(4.9)
elde edilir. (4.6) ve (4.9),
o
n
⃗ de yerine yazılırsa
olduğu görülür.
4.4.4. Teorem
Her null split kuaterniyon
İspat
√⟨ ⃗ ⃗ ⟩ + ⃗ şeklinde yazılabilir.
+ ⃗ null kuaterniyon olsun.
28
O zaman
⃗ ) (
(
⃗ )
⟨⃗ ⃗ ⟩
(4.10)
√⟨ ⃗ ⃗ ⟩
√⟨ ⃗ ⃗ ⟩ + ⃗
dir.
4.4.5. Teorem
null split kuaterniyon ise ⃗ time-like olamaz.
İspat
null split kuaterniyon ve ⃗ nin time-like olduğunu kabul edelim. O zaman
null olduğundan
⟨⃗ ⃗ ⟩
ve ⃗ time-like olduğundan
‖⃗ ‖
ifadeyi (4.10) de yerine yazarak
olmasını gerektirir. ‖ ⃗ ‖
yanlış yani ⃗
⟨⃗ ⃗ ⟩
bulunur. Bu ise
‖ ⃗ ‖ dir. Bu
ve ‖ ⃗ ‖
olması, ⃗ nuntime-like olmasıyla çelişir. O halde kabulümüz
time-like olamaz.
4.4.6. Teorem
null split kuaterniyon ve ⃗ null ise
İspat
⟨⃗ ⃗ ⟩
pure split kuaterniyondur.
ve ⃗ null ise
ve
vektör kısmı null pure split
kuaterniyondur.
4.4.9. Tanım
null split kuaterniyon iken vektör kısmı null ise ’ ya pure null split kuaterniyon denir.
29
4.4.10. Tanım
null split kuaterniyon iken vektör kısmı space-like ise ’ ya pure space-like null split
kuaterniyon denir.
4.4.1. Sonuç
Space-like split kuaterniyon kümesi split kuaterniyon çarpımına göre kapalı olmadığından
grup değildir [10].
4.4.2. Sonuç
{
}kümesi
split kuaterniyon çarpımı
altında grupdur [10].
İspat
şeklinde tanımlayalım.
kümesi işlemine göre ikili işlemdir.
i)
için
a)
olduğunu göstermeliyiz.
vektör kısmı time-like olan iki time-like split kuaterniyon olsun.o zaman
ve
Teorem 4.4.3 den,
o
n
o
n
⟨
⟩
o
o
,
n ⟨
n
n
şeklinde yazılabilir.
⟩
o
o
n
n
n
n
olduğundan
ve
o
o
n
n
veya
o
n
olduğundan da TH kümesi işlemine göre kapalıdır.
n
o
o
30
b) Vektör kısmı sırasıyla time-like, space-like olan iki time-like split kuaterniyon
p olsun. O zaman Teorem 4.4.2 ve Teorem 4.4.3 den
o
n
p
[ o
n
⟨
,p
o
o
n
n
⟩
⟩
o
n
n
o
olduğundan
o
n
⟨
n
şeklinde yazılabilir.
]
ve
p
n
o
n
n
o
n
n
o
n
olur ki bu bize vektör kısmı space-like olan time-like split kuaterniyonların TH kümesinin
işlemine göre kapalı olduğunu gösterir.
c) Vektör kısımları space-like olan iki time-like kuaterniyon
o
n
p
o
n
,p
o
o
n
n
⟨
n
ve
olsun.
şeklinde yazılabilir. O zaman
⟩
o
n
n
o
o
n
n
o
n
ve
⟨
⟩
olduğundan
ve
p
o
p
o
o
n
n
n
.
ii) Split time-like kuaterniyonun tanımdan her elemanın tersi vardır.
olmak üzere
iii)
dır.
olduğu (i) den görülür.
iv) Split kuaterniyon çarpımının tanımından q
dır.
4.4.3. Sonuç
Birim time-like kuaterniyon kümesi (
küre
nın bir alt grubudur [9]
) ve
{
⟨
⟩
} semi öklidyen
31
4.5. Split Kuaterniyonların ⃗ Birim Vektörünün de Moivre Formülleri
4.5.1. Teorem
birimtime-like ise
⟨
⃗ )
(
İspat :
dir.
⃗ ⟩
⃗
.
Buradan
⃗ ⟩
⟨
(4.11)
⃗
{
olur.
⃗
(4.12)
⃗ ⟩
⟨
⟨
⟩
0=
⃗
(4.12) den
ve
⃗
⟨
(4.12)
⃗ ⟩
(4.11) den
dir.
(4.13) den ⃗
olur.
4.5.2. Teorem
birim space-like ise
İspat
⟨
(
dir.
⃗ )
⃗ ⟩
⃗
⟨
⃗ ⟩
(4.14)
32
⃗
⃗
(4.15)
⃗ ⟩
⟨
⟨
⟩
0=
⃗
(4.15) den
ve
⃗
⟨
(4.16)
⃗ ⟩
(4.14) den
(4.16) den ⃗
dir.
olur.
4.5.3. Teorem
( ⃗ )
İspat
(
( ⃗ )
( ⃗ ) .
p
)
olduğundan
( ) olduğu görülür.
Buna göre
i)
ii)
(
)
( ) olur.
birim time-like ise
ve
iii)
birim space-like ise
ve
ve
olduğundan,
33
⃗
ıv)
∑
(
)
∑
(
)
∑
(
)
olduğundan
a)
birim time-like ise (4.17) den
⃗
∑
∑
∑
∑
o halde
⃗
o
b)
n
ve
⃗
o
birim space-like ise (4.17) den
⃗
∑
⃗
∑
⃗
o
∑
∑
n
.
4.5.1. Sonuç
birim time-like ise
(
dır.
)
{
n
n
n
(4.17)
34
4.5.2. Sonuç
birim space-like ise
(
)
n
n
{
dir.
4.6. Time-Like Kuaterniyondan Space-Like Kuaterniyon Elde Edilmesi
4.6.1. Lemma
Her vektör kısmı space-like olan time-like split kuaterniyonu ⃗
ile çarparak vektör kısmı
space-like olan space-like split kuaterniyon elde edilebilir.
⃗
⃗
( o
İspat P
⃗
⃗
P
) time-like split kuaterniyon ve ⃗ space-like olsun.
n
⃗
( n
)= ̅
o
olur.
̅
⃗
( n
[ n
o
⃗
)( n
o
)
]
o
olduğundan ̅ space-like split kuaterniyondur.
1) ⃗ time-like ise
o
⃗
⃗
o
n
( o
⃗
n
time-like split kuaterniyondur.
⃗
n
⃗
n
o
n
⟨⃗
⃗ ⟩
olduğundan q time-likedır.
2) ⃗ space-likeise
⃗
⃗
n
⃗
o
⃗
o
time-like split kuaterniyondur.
space-like kuaterniyondur.
35
⃗
n
o
⃗
( n
olduğundan ⃗
o
o
n
⟨⃗
⃗ ⟩
̅ space-like kuaterniyondur.
4.6.2. Lemma
Pure space-like kuaterniyon ile pure time-like kuaterniyonun çarpımı space-like split
kuaterniyondur.
p
İspat
l
tm
ve
l
olsun.
⟨
burada ⟨
⟩
⃗ dir. O halde:
ve
⃗ )(
⟩
⃗ )
⟨⃗ ⃗ ⟩
⟨
⟩
⟨
⟩
⟨
⟩
⟨
⟩
⟨
⟩
⟨
⟨
⟩
|
⟨( )
⟨
⟨
⟩
|
⟨
⟨
⟩
⟩
⟨
⟩
|
⟨
⟩
⟨
⟩
⟩
⟨
⟩
⟩
⟨( )
⟨
⟨
⟨
⟩
|
⟩
⟨
⟩
⟩
|
⟩
|
⟩
olduğundan r
birim space-like dır.
36
4.6.3. Lemma
Pure time-like kuaterniyon ile pure time-like kuaterniyonun çarpımı space-like dır.
İspat ⃗ t m
⃗
⟨⃗
⃗
burada ⟨⃗
ve ⃗ t m
l
⃗ ⟩
⃗ ⟩
⃗
ve ⃗
⃗ )(
r
l
olsun.
⃗
⃗ dir. O halde:
⃗
⃗ )
⟨⃗ ⃗ ⟩
⟨
⟩
⟨
⟩
⟨
⟩
⟨
⟩Ö
⟨
⟩
⟨
⟨
⟩
|
⟨( )
⟨
⟨
⟩
|
⟨
⟨
⟩
⟩
⟨
⟩
|
⟨
⟩
⟨
⟩
⟩Ö
⟨
⟩Ö
⟩Ö
⟨( )
⟨
⟨
⟨
⟩
|
⟩
⟨
⟩
⟩Ö
|
⟩Ö
|
⟩
⃗
olduğundan
⃗ birim time-like dır.
4.6.4. Lemma
Pure space-like kuaterniyon ile pure space-like kuaterniyonun çarpımı time-like dır.
İspat:
p
l
ve ⃗
p
l
olsun.
37
⟨
burada ⟨⃗
⟩
⃗ ⟩
ve ⃗
⃗ )(
r
⃗ dir. O halde:
⃗
⃗ )
⟨⃗ ⃗ ⟩
⟨
⟩
⟨
⟩
⟨
⟩
⟨
⟩Ö
⟨
⟩
⟨
⟨
⟩
|
⟨( )
⟨
⟨
⟩
|
⟨
⟨
⟩
⟩
⟨
⟩
|
⟨
⟩
⟨
⟩
⟩Ö
⟨
olduğundan
⟩Ö
⟩Ö
⟨( )
⟨
⟨
⟨
⟩
|
⟩
⟨
⟩
⟩Ö
|
⟩Ö
|
⟩
⃗
⃗ birim time-like dır.
4.6. 1. Sonuç
Vektör olarak kausal karakterler ile pure Kuaterniyonun kausal karakterleri aynıdır.
Çizelge 4.1. Split kuaterniyonların vektör kısımlarının kuaterniyon çarpımı
⃗
p
⃗
p
l
⃗
tm
l
m
p
⃗
l
tm
l
l
p
l
l
m
l
38
4.7. Split Kuaterniyonlar da de Moivre Formülü
4.7.1.Teorem
q birim time-like split kuaterniyon için vektör kısmı time-like ise n
o
için
n
dir [6].
İspat q birim time-like split kuaterniyon ve ⃗
o
time-like olsun. Teorem 4.4.3 den
n
olacak şekilde
ve
time-like vektörü vardır.
o
q q
⟨
o
⟨
n
⟩
o
⟩
n
n
n
o
n
olduğundan
o
n
o
n
o
n
bu işlemi n defa uygulanırsa
o
n
olduğu görülür.
4.7.2. Teorem
q birim time-like split kuaterniyonun vektör kısmı space-like ise n
o
n
için
n n
dir [10].
İspat q birim time-like split kuaterniyon ve ⃗ space-like olsun. Teorem 4.2.2’den
o
n
39
olacak şekilde
space-like vektörü vardır.
ve
o
q q
n
⟨
o
⟨
⟩
o
⟩
n
n
n
o
n
olduğundan
o
n
n
o
o
n
bu işlemi n defa uygulanırsa
o
n
olduğu görülür.
4.7.3. Teorem
Her q space-like split kuaterniyonu için n
{
o
n
n
o
olduğunda;
nç t
nt
dir [10].
İspat q birim space-like split kuaterniyonu olsun. Teorem 4.4.1 den
n
q
o
⟨
olacak şekilde
space-like vektörü vardır. O halde
⟩
dır.
n
q q
o
n
⟨
n
o
⟩
n
n
o
o
o
n
n
n
n
o
o
⟨
o
o
olur.
o
n
o
o
o
n
⟩ n
o
o
o
n
n
n
40
n defa tekrarlanırsa n çift olduğunda vektör kısmı space-like olan time-like kuaterniyon , n
tek sayı ise space likekuaterniyon elde edilir.
4.8. Split Kuaterniyonların Kökleri
4.8.1. Teorem
o
Vektör kısmı space-like olan time-like kuaterniyon
denkleminin sadece bir kökü
o
√
n
n
olsun.
dir ve time-like
kuaterniyon kümesindedir [10].
İspat Eğer
ise
o
,
n
n n
√
Bu nedenle
ile birim vektörü alacak. Teorem 4.7.2.den
olur. Böylece
o
n
ve
dir.
nun bir köküdür. Eger iki kök elde
,
edilirse bunlar birbirine eşit olmalıdır [10].
4.8.2. Teorem
o
Vektör kısmı time-like olan time-like kuaterniyon
n
olsun.
denkleminin time-like kuaterniyon kökleri
o
√
vardır. Burada m 0,1,2,3,….,n-1 dir [ ]
n
İspat Kabul edelim ki
o
denkleminin kökü
n
vektör kısımları aynıdır. Teorem 4.7.1. den
o
O halde
Q nun n tane kökleri
o
n
n
olduğunu gösterir.
olduğundan
√
o
olur.
n
dir.
olsun,
ve
nun
41
4.8.3. Teorem
⃗
⃗ ve q birim time-like kuaterniyon olsun. Time-like kuaterniyon kümesinde
denkleminin sonsuz sayıda kökleri vardır [10].
İspat: n inci kuvvetinin vektör kısmı sıfır ve reel sayıdan oluşan
dolayı vektör kısmı time-like olan time-like kuaterniyon
o
n
n
o
√
kabul edelim.
yazabiliriz. Teorem 4.7.1 den
( o
o halde
yı bulmalıyız. Bundan
)=
ve
n
√
,
için m= 0,1,2,3
m=0,1,2,…,n-1 kökleri bulunur. Buradan
köklerinin sonsuz sayıda kökleri vardır. Çünkü her kuaterniyon, ⃗ time-like birim vektörü
ile sonsuz sayıda
√
⃗
o
n
formunda vardır. Burada her ⃗ time-like vektörü için
başka time-like kuaterniyon denklemi elde edilir.
denklemini sağlayan tüm time-like kuaterniyonlar 3-boyutlu Minkowski uzayında
farklı eksenleri aynı açıyla dönmeyi sağlar [10]. Eğer n çift ise
denklemin bazı
kökleri space-like kuaterniyonlar olabilir.
Şimdi space-like kuaterniyonun köklerini space-like kümesinden elde edelim.
Bu durum için n’nin çift veya tek olması önemlidir [10].
4.8.4. Teorem
q=
( n
o
) space-like kuaterniyon olsun.
space-like kuaterniyon için
i) n çift sayı ise çözüm yoktur.
denklemini sağlayan
42
ii) n tek ise sadece bir tek space-like kuaterniyon kökü
n
√
o
şeklindedir [6].
İspat Eğer n çift ise space-likekuaterniyonun. kuvveti time-like kuaterniyondur ve bu
durumda hiçbir çözüm yoktur.
n
denkleminin kökü
n tek ise
o
olsun. n. Dereceden
kuvveti, Teorem 4.7.3 den
n
o
n
o
ve
√
ve
olduğu görülür.
4.8.5. Teorem
⃗⃗⃗
için,
i) Eğer ⃗
time-like ise ⃗
ii) Eğer ⃗
space-like vektördür.
space-like ise,
a) Sp{ ⃗
} space-like (|⟨
⟩ |
b) Sp{ ⃗
} time-like (|⟨
c) Sp{ ⃗
} light-like (null) (|⟨
‖ ‖‖ ‖ ise ⃗
⟩ |
time-like ,
‖ ‖‖ ‖ ise ⃗
⟩ |
space-like ,
‖ ‖‖ ‖ ise ⃗
null (light-like)
vektördür [11, 12].
İspat [5], [6], [11] den görülür.
4.8.6. Teorem
Eğer
birim space-like vektör ve |⟨
çarpımının vektör kısmı space-like dır ve ‖⃗⃗⃗
İspat
)
⟩ |
⃗⃗⃗ ‖
‖ ‖‖ ‖ ise
n
dır [9].
split kuaterniyon
43
‖⃗⃗⃗
⃗⃗⃗ ‖
√⟨⃗⃗⃗
⃗⃗⃗ ⃗⃗⃗
⟨⃗⃗⃗
⃗⃗⃗ ⃗⃗⃗
⃗⃗⃗ ⟩
⃗⃗⃗ ⟩
⟨ (⃗⃗⃗
⃗⃗⃗ ) ⃗⃗⃗
⟨ (⃗⃗⃗
⃗⃗⃗ ) ⃗⃗⃗
⟨
|
⟨
(⃗⃗⃗ ) ⃗⃗⃗ ⟩
(⃗⃗⃗ ) ⃗⃗⃗ ⟩
⟨
⟨
⟩
⟩
|
⃗⃗⃗ ⟩
⃗⃗⃗ ⟩
⟨ (⃗⃗⃗ ) ⃗⃗⃗ ⟩
|
⟨ (⃗⃗⃗ ) ⃗⃗⃗ ⟩
⟨
⟨
⟩
|
⟩
⟨
⟩
⟨
⟩ ⟨
⟩
⟨
⟩
‖ ‖‖ ‖
⟨
⟩
o
n
‖⃗⃗⃗
‖⃗⃗⃗
⃗⃗⃗ ‖
⃗⃗⃗ ‖
√ n
n
(4.18)
split kuaterniyon çarpımının vektör kısmı
⃗⃗⃗⃗
⃗⃗⃗⃗
‖⃗⃗⃗⃗
⃗⃗⃗⃗
⃗⃗⃗
olarak alınırsa
⃗⃗⃗⃗ ‖
(4.18) yerine konursa
⃗⃗⃗⃗
⃗⃗⃗
n
(4.18) ve (4.19),
o
(4.19)
⟨⃗
⃗ ⟩
⃗
⃗
de yerine konursa
n
elde edilir.
4.8.7. Teorem
Eğer
birim space-like vektör ve |⟨
⟩ |
‖ ‖‖ ‖ ise bu durumda ⃗⃗⃗
Lorentziyen vektörel çarpımı null (light-like) vektördür [9].
⃗⃗⃗
44
İspat Teorem 4.8.6 daki yöntemle yapılır.
4.8.8. Teorem
Her birim time-like
ifade edilebilir. Burada
o
ve
n
olacak şekilde
arasındaki hiperpolik açıdır.
space-like birim vektörü
ve birim time-like vektörleri
i)
ii)
kuaterniyonu
birim time-like vektörlerine diktir.
⟩ |
ya dik ve |⟨
.
İspat [9] dan görülür.
4.8.9. Teorem
ve
arasındaki hiperpolik açı ve
time-like kuaterniyon
o
Lorentziyen vektörler olmak üzere her birim
ve
n
‘nu vektör kısmı time-like olan
şekilde ifade edilebilir [9].
4.9. Split Kuaterniyon İçin Lorentz Uzayında Dönme
4.9.1. Teorem
q ve r time-like kuaterniyon olsun.
dönüşümü ile
time-like kuaterniyonun normu ve scalar kısmı r ile aynıdır. Ayrıca
İspat Önce
(
tanımlı
doğrusaldır [9].
Skalar ve Normunun aynı olup olmadığını araştırılacaktır.
)
Doğrusallığını göstermek için a skalar sayısı ile
olduğundan doğrusaldır.
olduğundan aynıdır.
split kuaterniyon olsun.
45
4.9.1. Tanım
⃗⃗⃗⃗⃗
birtime-like kuaterniyon ve
⃗⃗⃗
(
)
olmak üzere,
∑
dönüşümünü kullanarak elde edilen
[
]
matrisine döndürme matrisi denir.
Bu matrisin aygen değerleri
√
{
√
}
dir.
4.9.1. Sonuç
nun aygen değerleri kuaterniyonun skalar kısmına bağlı, fakat vektörel kısmından
bağımsızdır.
Bu matrisin bu aygen değerlere karşılık gelen aygen vektörleri de sırası ile
(
) (
√ (
(
)
)
√ (
(
)
)
) (
√ (
(
şeklinde bulunur.
4.9.2. Sonuç
Dönme ekseni, split kuaterniyonun skalar kısmından bağımsızdır.
)
)
√ (
(
)
)
)
46
İspat 1’e karşılık gelen aygen vektör
(
)
dır.
4.9.2. Tanım
Standart tabana göre Minkowski 3-uzayında dönme matrislerinin kümesi ortagonal grup
olarak
SO(1,2)
{
[
]
[
]
}
şeklinde yazılır [5].
4.9.2. Teorem
şeklindeki dönüşüm bir homomorfizmdir.
İspat [9] dan görülebilir.
4.9.2. Sonuç
orentz uzayında belirli bir 3x3 ortogonal R matrisinden time-like kuaterniyonun
bileşenlerini aşağıdaki formüllerle bulunabilir.
47
olduğu zaman birim time-like kuaterniyon
ve
denklemlerini kullanarak bulabiliriz [9].
4.9.3. Teorem
( o
n
) birimtime-like kuaterniyon ve vektörel kısmı space-like olsun.
üç boyutlu Minkowski uzayında bir vektör ise
=
dönüşümü
space-
like ekseni etrafında 2 kadar hiperbolik dönmeyi ifade eder [9].
İspat Sağ sistem {
{
} seçersek
n
n
ve
şeklinde yazılabilir.
o
e
dönüşümü hesaplanırsa,⃗⃗⃗
,
paralel olduğundan
n
o
o
o
n
burada
n
o
n
n
ortagonal pure kuaterniyon ve
)
⟨
ya
olur.
o
olduğundan
,
} vektörü sırasıyla space-like ve time-like iken
o
(
,
⟩
⟨
⟩
kullanarak
)
48
o
n
dönüşümünün
bulunur. Bu ise
ekseni etrafında
nu,
hiperbolik açısı kadar
döndürmesi demektir.
4.9.4. Teorem
o
n
vektör ise
time-like kuaterniyonun vektör kısmı time-like ve,
dönüşümü
=
her hangi bir
time-like ekseni etrafında 2 hiperbolik açısı
kadar dönmeyi ifade eder [9].
İspat
vektörü
vektörlerinin gerdiği düzlemdeki space-like vektör olacak
ve
şekilde
,
,
sistemini seçelim. O zaman ’nın time-like ve space-like olmasına göre sırasıyla
o
n
n
ve
o
yazılabilir.
Şimdi
olmak üzere; bu dönüşüm altında
görülebilir.
ya paralel olduğundan
olur. Burada
(
)
ve
ortagonal pure kuaterniyon ve
⟨
⟩
⟨
⟩
kullanarak
)
olduğu yukarıdaki eşitlikte yazılırsa.
ve
’in nasıl değişeceğini
49
o
n
o
o
o
o
n
n
o
n
n
n
bulunur.
Bunun anlamı
dönüşümü, vektörünü,
vektörü etrafında
hiperbolik açısı
kadar döndürülmesidir [9].
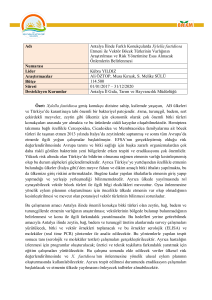
4.9.1. Örnek
ve düzleminde birim time-like vektörü
o
like kuaterniyonu
n
olsun. Vektör kısmı time-like olan birim timeo
alalım.
n
olur.
hiperbolik açısı ile arasındaki açıdır. ⃗ , ye paraleldir.
Burada
=
=
=
Böylece
o
n
o
o
o
o
n
n
o
n
n
n
olarak da buluruz.
nin anlamı pozitif yönde 2 açılı i ekseni etrafında j ekseninin dönmesiyle elde
edilen vektördür. Bundan dolayı time-like vektör
altında 2 açısı kadar dönmeyi belirtir [9].
o
n
,
dönüşümü
50
Şekil 4.1. Bir birim vektör kısmı time-like olan q time-like split kuaterniyonun lighlike
olmayan q ekseni etrafında 2 açısı kadar dönme belirtir.
51
5. SONUÇ VE ÖNERİLER
Bu tezde elde edilen ve özgün olduğunu düşündüğümüz Teorem 4.4.4., Teorem 4.4.5.,
Teorem 4.5.1., Teorem 4.5.2, Teorem 4.5.3., Lemma 4.6.1., Lemma 4.6.3., Sonuç 4.6.1.,
Sonuç 4.9.1 ve Sonuç 4.9.2.
Bu Teorem, Lemma ve Sonuçların geometrik yorumları henüz bulunmamaktadır. Bu
geometrik yorumların daha sonraki çalışmalarda yapılabileceğini düşünmekteyiz.
52
53
KAYNAKLAR
1.
Soydaş, M. (2003). Bi kuaterniyonların Modern Fiziğe Uygulanması, Yüksek Lisans
Tezi, Anadolu Üniversitesi Fen Bilimleri Enstitüsü, Eskişehir, 1-10.
2.
Tanışlı, M., Özdaş, K., ve Özdaş, A. (1997). An Application of General Quaternion
Transformationfor a Robotics Position.(Üçüncü Baskı). Eskişehir/Türkiye:Anadolu
Üniversitesi, 55-68.
3.
Jafari, M. (2012). Genelleştirilmiş Hamilton Operatörleri ve Lie Grupları, Doktora
Tezi, Ankara Üniversitesi Fen Bilimleri Enstitüsü, Ankara Üniversitesi Yayınları,
50-1-50.
4.
Cho, E. (1998). De-Moivre’s Formula for Quaternions. Appl. Math. Lett., 11(6); 3335.
5.
Hacısalihoğlu, H.H. (2000). Vektör Uzaylarının Lineer Dönüşümleri ve Matrisler,
Lineer Cebir. Ankara Üniversitesi Fen-Edebiyat Fakültesi Yayınları, Ankara; (3);1298.
6.
Hacısalihoğlu, H.H. (1983). Hareketler Geometrisi ve Kuaterniyonlar Teorisi.
Ankara/Türkiye:Gazi Yayınları, (2); 22-98.
7.
Bükçü, B. (2003).
Semi-Riemann Uzaylarında Hareketler, Doktora Tezi,
Ankara Üniversitesi Fen Bilimleri Enstitüsü Ankara; 1-20.
8.
Kabadayı, H.ve Yaylı, Y. (2011). De-Moivre’s Formula for Dual Quaternions.
Kuwait Journal Of Sci., Tech, 38(1); 15-23.
9.
Özdemir, M. ve Erğin, A.A. (2006). Rotations With Unit Time-like Quaternions in
Minkowski 3-space. Journal of Geometry and Physics, 56(2); 322-336.
10.
Özdemir, M. (2009). The Roots of a split Quaternion. Applied Mathematics Letters,
22(2), 258-263.
11.
Ward, J.P. (1997). Numbers Algebra and Applications.(4). London/England:Kluwer
Academıc publıshers, 54-102.
12.
Ratcliffe, J.G. (2006). Foundations of Hyperbolic Monifolds.(3). New York/United
States America:Springer New York, 54-64.
13.
Mortazaas, H., Jaferi, M. and Yaylı, Y. (2012). Some Algebraıc Propertıes of Dual
Generalızed Quaternıons Algebra. Far East Journal of Math. Sciences, 69(2); 307318.
14.
Ölmez, O. (2006). Genelleştirilmiş Kuaterniyonlar ve Uygulamalar, Yüksek Lisans
Tezi, Ankara Üniversitesi Fen Bilimleri Enstitüsü, Ankara, 12-43.
15.
Meral, M. (2009). Kuaterniyonlara Ait Matrisler İçin de Moivre ve Euler Formülleri,
Yüksek Lisans Tezi, Ankara Üniversitesi Fen Bilimleri Enstitüsü, Ankara, 3-20.
54
16.
Kula, L. ve Yaylı, Y (2007). Split Quaternions and Rotations in semi-euclide an
space . J. Korean Math, 44(6); 1313-1327.
55
ÖZGEÇMİŞ
Kişisel Bilgiler
Soyadı, adı
: Soner OFLAZ
Uyruğu
: T.C.
Doğum tarihi ve yeri
: 09.07.1975, Ankara
Medeni hali
: Bekar
Telefon
: 0 (505) 592 88 48
E-Posta
: soner.oflaz@gmail.com
Eğitim
Derece
Eğitim Birimi
Mezuniyet tarihi
Yüksek lisans
Lisans
Gazi Üniversitesi
Gazi Üniversitesi
Devam Ediyor
2000
Lise
Mimar Sinan Lisesi
1993
İş Deneyimi
Yıl
2002-2014
Çalıştığı Yer
Milli Eğitim Bakanlığı
Görev
Öğretmen
Yabancı Dil
İngilizce
Hobiler
Sinema, Müzik, Tiyatro, Dağ gezisi.
GAZİ GELECEKTİR...